Arxiv:1409.4130V2
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Geometry of Generalized Permutohedra
Geometry of Generalized Permutohedra by Jeffrey Samuel Doker A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Mathematics in the Graduate Division of the University of California, Berkeley Committee in charge: Federico Ardila, Co-chair Lior Pachter, Co-chair Matthias Beck Bernd Sturmfels Lauren Williams Satish Rao Fall 2011 Geometry of Generalized Permutohedra Copyright 2011 by Jeffrey Samuel Doker 1 Abstract Geometry of Generalized Permutohedra by Jeffrey Samuel Doker Doctor of Philosophy in Mathematics University of California, Berkeley Federico Ardila and Lior Pachter, Co-chairs We study generalized permutohedra and some of the geometric properties they exhibit. We decompose matroid polytopes (and several related polytopes) into signed Minkowski sums of simplices and compute their volumes. We define the associahedron and multiplihe- dron in terms of trees and show them to be generalized permutohedra. We also generalize the multiplihedron to a broader class of generalized permutohedra, and describe their face lattices, vertices, and volumes. A family of interesting polynomials that we call composition polynomials arises from the study of multiplihedra, and we analyze several of their surprising properties. Finally, we look at generalized permutohedra of different root systems and study the Minkowski sums of faces of the crosspolytope. i To Joe and Sue ii Contents List of Figures iii 1 Introduction 1 2 Matroid polytopes and their volumes 3 2.1 Introduction . .3 2.2 Matroid polytopes are generalized permutohedra . .4 2.3 The volume of a matroid polytope . .8 2.4 Independent set polytopes . 11 2.5 Truncation flag matroids . 14 3 Geometry and generalizations of multiplihedra 18 3.1 Introduction . -

Two Poset Polytopes
Discrete Comput Geom 1:9-23 (1986) G eometrv)i.~.reh, ~ ( :*mllmlati~ml © l~fi $1~ter-Vtrlq New Yorklu¢. t¢ Two Poset Polytopes Richard P. Stanley* Department of Mathematics, Massachusetts Institute of Technology, Cambridge, MA 02139 Abstract. Two convex polytopes, called the order polytope d)(P) and chain polytope <~(P), are associated with a finite poset P. There is a close interplay between the combinatorial structure of P and the geometric structure of E~(P). For instance, the order polynomial fl(P, m) of P and Ehrhart poly- nomial i(~9(P),m) of O(P) are related by f~(P,m+l)=i(d)(P),m). A "transfer map" then allows us to transfer properties of O(P) to W(P). In particular, we transfer known inequalities involving linear extensions of P to some new inequalities. I. The Order Polytope Our aim is to investigate two convex polytopes associated with a finite partially ordered set (poset) P. The first of these, which we call the "order polytope" and denote by O(P), has been the subject of considerable scrutiny, both explicit and implicit, Much of what we say about the order polytope will be essentially a review of well-known results, albeit ones scattered throughout the literature, sometimes in a rather obscure form. The second polytope, called the "chain polytope" and denoted if(P), seems never to have been previously considered per se. It is a special case of the vertex-packing polytope of a graph (see Section 2) but has many special properties not in general valid or meaningful for graphs. -

1 Lifts of Polytopes
Lecture 5: Lifts of polytopes and non-negative rank CSE 599S: Entropy optimality, Winter 2016 Instructor: James R. Lee Last updated: January 24, 2016 1 Lifts of polytopes 1.1 Polytopes and inequalities Recall that the convex hull of a subset X n is defined by ⊆ conv X λx + 1 λ x0 : x; x0 X; λ 0; 1 : ( ) f ( − ) 2 2 [ ]g A d-dimensional convex polytope P d is the convex hull of a finite set of points in d: ⊆ P conv x1;:::; xk (f g) d for some x1;:::; xk . 2 Every polytope has a dual representation: It is a closed and bounded set defined by a family of linear inequalities P x d : Ax 6 b f 2 g for some matrix A m d. 2 × Let us define a measure of complexity for P: Define γ P to be the smallest number m such that for some C s d ; y s ; A m d ; b m, we have ( ) 2 × 2 2 × 2 P x d : Cx y and Ax 6 b : f 2 g In other words, this is the minimum number of inequalities needed to describe P. If P is full- dimensional, then this is precisely the number of facets of P (a facet is a maximal proper face of P). Thinking of γ P as a measure of complexity makes sense from the point of view of optimization: Interior point( methods) can efficiently optimize linear functions over P (to arbitrary accuracy) in time that is polynomial in γ P . ( ) 1.2 Lifts of polytopes Many simple polytopes require a large number of inequalities to describe. -

Uniform Polychora
BRIDGES Mathematical Connections in Art, Music, and Science Uniform Polychora Jonathan Bowers 11448 Lori Ln Tyler, TX 75709 E-mail: [email protected] Abstract Like polyhedra, polychora are beautiful aesthetic structures - with one difference - polychora are four dimensional. Although they are beyond human comprehension to visualize, one can look at various projections or cross sections which are three dimensional and usually very intricate, these make outstanding pieces of art both in model form or in computer graphics. Polygons and polyhedra have been known since ancient times, but little study has gone into the next dimension - until recently. Definitions A polychoron is basically a four dimensional "polyhedron" in the same since that a polyhedron is a three dimensional "polygon". To be more precise - a polychoron is a 4-dimensional "solid" bounded by cells with the following criteria: 1) each cell is adjacent to only one other cell for each face, 2) no subset of cells fits criteria 1, 3) no two adjacent cells are corealmic. If criteria 1 fails, then the figure is degenerate. The word "polychoron" was invented by George Olshevsky with the following construction: poly = many and choron = rooms or cells. A polytope (polyhedron, polychoron, etc.) is uniform if it is vertex transitive and it's facets are uniform (a uniform polygon is a regular polygon). Degenerate figures can also be uniform under the same conditions. A vertex figure is the figure representing the shape and "solid" angle of the vertices, ex: the vertex figure of a cube is a triangle with edge length of the square root of 2. -

Arxiv:1705.01294V1
Branes and Polytopes Luca Romano email address: [email protected] ABSTRACT We investigate the hierarchies of half-supersymmetric branes in maximal supergravity theories. By studying the action of the Weyl group of the U-duality group of maximal supergravities we discover a set of universal algebraic rules describing the number of independent 1/2-BPS p-branes, rank by rank, in any dimension. We show that these relations describe the symmetries of certain families of uniform polytopes. This induces a correspondence between half-supersymmetric branes and vertices of opportune uniform polytopes. We show that half-supersymmetric 0-, 1- and 2-branes are in correspondence with the vertices of the k21, 2k1 and 1k2 families of uniform polytopes, respectively, while 3-branes correspond to the vertices of the rectified version of the 2k1 family. For 4-branes and higher rank solutions we find a general behavior. The interpretation of half- supersymmetric solutions as vertices of uniform polytopes reveals some intriguing aspects. One of the most relevant is a triality relation between 0-, 1- and 2-branes. arXiv:1705.01294v1 [hep-th] 3 May 2017 Contents Introduction 2 1 Coxeter Group and Weyl Group 3 1.1 WeylGroup........................................ 6 2 Branes in E11 7 3 Algebraic Structures Behind Half-Supersymmetric Branes 12 4 Branes ad Polytopes 15 Conclusions 27 A Polytopes 30 B Petrie Polygons 30 1 Introduction Since their discovery branes gained a prominent role in the analysis of M-theories and du- alities [1]. One of the most important class of branes consists in Dirichlet branes, or D-branes. D-branes appear in string theory as boundary terms for open strings with mixed Dirichlet-Neumann boundary conditions and, due to their tension, scaling with a negative power of the string cou- pling constant, they are non-perturbative objects [2]. -

15 BASIC PROPERTIES of CONVEX POLYTOPES Martin Henk, J¨Urgenrichter-Gebert, and G¨Unterm
15 BASIC PROPERTIES OF CONVEX POLYTOPES Martin Henk, J¨urgenRichter-Gebert, and G¨unterM. Ziegler INTRODUCTION Convex polytopes are fundamental geometric objects that have been investigated since antiquity. The beauty of their theory is nowadays complemented by their im- portance for many other mathematical subjects, ranging from integration theory, algebraic topology, and algebraic geometry to linear and combinatorial optimiza- tion. In this chapter we try to give a short introduction, provide a sketch of \what polytopes look like" and \how they behave," with many explicit examples, and briefly state some main results (where further details are given in subsequent chap- ters of this Handbook). We concentrate on two main topics: • Combinatorial properties: faces (vertices, edges, . , facets) of polytopes and their relations, with special treatments of the classes of low-dimensional poly- topes and of polytopes \with few vertices;" • Geometric properties: volume and surface area, mixed volumes, and quer- massintegrals, including explicit formulas for the cases of the regular simplices, cubes, and cross-polytopes. We refer to Gr¨unbaum [Gr¨u67]for a comprehensive view of polytope theory, and to Ziegler [Zie95] respectively to Gruber [Gru07] and Schneider [Sch14] for detailed treatments of the combinatorial and of the convex geometric aspects of polytope theory. 15.1 COMBINATORIAL STRUCTURE GLOSSARY d V-polytope: The convex hull of a finite set X = fx1; : : : ; xng of points in R , n n X i X P = conv(X) := λix λ1; : : : ; λn ≥ 0; λi = 1 : i=1 i=1 H-polytope: The solution set of a finite system of linear inequalities, d T P = P (A; b) := x 2 R j ai x ≤ bi for 1 ≤ i ≤ m ; with the extra condition that the set of solutions is bounded, that is, such that m×d there is a constant N such that jjxjj ≤ N holds for all x 2 P . -

Frequently Asked Questions in Polyhedral Computation
Frequently Asked Questions in Polyhedral Computation http://www.ifor.math.ethz.ch/~fukuda/polyfaq/polyfaq.html Komei Fukuda Swiss Federal Institute of Technology Lausanne and Zurich, Switzerland [email protected] Version June 18, 2004 Contents 1 What is Polyhedral Computation FAQ? 2 2 Convex Polyhedron 3 2.1 What is convex polytope/polyhedron? . 3 2.2 What are the faces of a convex polytope/polyhedron? . 3 2.3 What is the face lattice of a convex polytope . 4 2.4 What is a dual of a convex polytope? . 4 2.5 What is simplex? . 4 2.6 What is cube/hypercube/cross polytope? . 5 2.7 What is simple/simplicial polytope? . 5 2.8 What is 0-1 polytope? . 5 2.9 What is the best upper bound of the numbers of k-dimensional faces of a d- polytope with n vertices? . 5 2.10 What is convex hull? What is the convex hull problem? . 6 2.11 What is the Minkowski-Weyl theorem for convex polyhedra? . 6 2.12 What is the vertex enumeration problem, and what is the facet enumeration problem? . 7 1 2.13 How can one enumerate all faces of a convex polyhedron? . 7 2.14 What computer models are appropriate for the polyhedral computation? . 8 2.15 How do we measure the complexity of a convex hull algorithm? . 8 2.16 How many facets does the average polytope with n vertices in Rd have? . 9 2.17 How many facets can a 0-1 polytope with n vertices in Rd have? . 10 2.18 How hard is it to verify that an H-polyhedron PH and a V-polyhedron PV are equal? . -

REGULAR POLYTOPES in Zn Contents 1. Introduction 1 2. Some
REGULAR POLYTOPES IN Zn ANDREI MARKOV Abstract. In [3], all embeddings of regular polyhedra in the three dimen- sional integer lattice were characterized. Here, we prove some results toward solving this problem for all higher dimensions. Similarly to [3], we consider a few special polytopes in dimension 4 that do not have analogues in higher dimensions. We then begin a classification of hypercubes, and consequently regular cross polytopes in terms of the generalized duality between the two. Fi- nally, we investigate lattice embeddings of regular simplices, specifically when such simplices can be inscribed in hypercubes of the same dimension. Contents 1. Introduction 1 2. Some special cases, and a word on convexity. 2 3. Hypercubes and Cross Polytopes 4 4. Simplices 4 5. Corrections 6 Acknowledgments 7 References 7 1. Introduction Definition 1.1. A regular polytope is a polytope such that its symmetry group action is transitive on its flags. This definition is not all that important to what we wish to accomplish, as the classification of all such polytopes is well known, and can be found, for example, in [2]. The particulars will be introduced as each case comes up. Definition 1.2. The dual of a polytope of dimension n is the polytope formed by taking the centroids of the n − 1 cells to be its vertices. The dual of the dual of a regular polytope is homothetic to the original with respect to their mutual center. We will say that a polytope is \in Zn" if one can choose a set of points in the lattice of integer points in Rn such that the points can form the vertices of said polytope. -

On Some Polytopes Contained in the 0,1 Hypercube That Have a Small Chv´Atalrank
On Some Polytopes Contained in the 0,1 Hypercube that Have a Small Chv´atalRank G´erardCornu´ejols∗ Dabeen Leey April 2016, revised July 2017 Abstract In this paper, we consider polytopes P that are contained in the unit hypercube. We provide conditions on the set of 0,1 vectors not contained in P that guarantee that P has a small Chv´atal rank. Our conditions are in terms of the subgraph induced by these infeasible 0,1 vertices in the skeleton graph of the unit hypercube. In particular, we show that when this subgraph contains no 4-cycle, the Chv´atalrank is at most 3; and when it has tree width 2, the Chv´atalrank is at most 4. We also give polyhedral decomposition theorems when this graph has a vertex cutset of size one or two. 1 Introduction n n n Let Hn := [0; 1] denote the 0,1 hypercube in R . Let P ⊆ Hn be a polytope. Let S := P \ f0; 1g n denote the set of 0,1 vectors in P . If an inequality cx ≥ d is valid for P for some c 2 Z , then n cx ≥ dde is valid for conv(S) since it holds for any x 2 P \ Z . Chv´atal[4] introduced an elegant notion of closure as follows. 0 \ n P = fx 2 R : cx ≥ dminfcx : x 2 P geg c2Zn is the Chv´atalclosure of P . Chv´atal'scuts are equivalent to Gomory's fractional cuts [13] and the closure defined by Gomory's fractional cuts is the same as the Chv´atalclosure. -
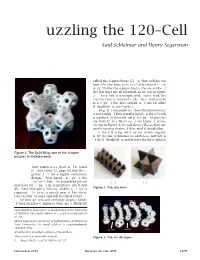
Puzzling the 120–Cell
Puzzling the 120–Cell Saul Schleimer and Henry Segerman called the 6-piece burrs [5]. Another well-known burr, the star burr, is more closely related to our work. Unlike the 6-piece burrs, the six sticks of the star burr are all identical, as shown in Figure 2A. The solution is unique, and, once solved, the star burr has no internal voids. The solved puzzle is a copy of the first stellation of the rhombic dodecahedron; see Figure 2B. The goal of this paper is to describe Quintessence: a new family of burr puzzles based on the 120-cell, a regular four-dimensional polytope. The puzzles are built from collections of six kinds of sticks, shown in Figure 3; we call these ribs, as they are gently curving chains of distorted dodecahedra. In the following sections we review regular polytopes in low dimensions, sketch a construction of the dodecahedron, and discuss the three-sphere, Figure 1. The Dc30 Ring, one of the simpler puzzles in Quintessence. burr puzzle is a collection of notched wooden sticks [2, page xi] that fit to- gether to form a highly symmetric design, often based on one of the Platonic solids. The assembled puzzle (A) (B) Amay have zero, one, or more internal voids; it may also have multiple solutions. Ideally, no force is Figure 2. The star burr. required. Of course, a puzzle may violate these rules in various ways and still be called a burr. The best known, and certainly largest, family inner six outer six of burr puzzles comprises what are collectively spine Saul Schleimer is professor of mathematics at the University of Warwick. -

The Value Function Polytope in Reinforcement Learning
The Value Function Polytope in Reinforcement Learning Robert Dadashi 1 Adrien Ali Ta¨ıga 1 2 Nicolas Le Roux 1 Dale Schuurmans 1 3 Marc G. Bellemare 1 Abstract Line theorem. We show that policies that agree on all but We establish geometric and topological proper- one state generate a line segment within the value function ties of the space of value functions in finite state- polytope, and that this segment is monotone (all state values action Markov decision processes. Our main con- increase or decrease along it). tribution is the characterization of the nature of its Relationship between faces and semi-deterministic poli- shape: a general polytope (Aigner et al., 2010). To cies. We show that d-dimensional faces of this polytope are demonstrate this result, we exhibit several proper- mapped one-to-many to policies which behave deterministi- ties of the structural relationship between policies cally in at least d states. and value functions including the line theorem, which shows that the value functions of policies Sub-polytope characterization. We use this result to gen- constrained on all but one state describe a line eralize the line theorem to higher dimensions, and demon- segment. Finally, we use this novel perspective strate that varying a policy along d states generates a d- to introduce visualizations to enhance the under- dimensional sub-polytope. standing of the dynamics of reinforcement learn- Although our “line theorem” may not be completely surpris- ing algorithms. ing or novel to expert practitioners, we believe we are the first to highlight its existence. In turn, it forms the basis of the other two results, which require additional technical ma- 1. -

Lecture 2 - Introduction to Polytopes
Lecture 2 - Introduction to Polytopes Optimization and Approximation - ENS M1 Nicolas Bousquet 1 Reminder of Linear Algebra definitions n Pm Let x1; : : : ; xm be points in R and λ1; : : : ; λm be real numbers. Then x = i=1 λixi is said to be a: • Linear combination (of x1; : : : ; xm) if the λi are arbitrary scalars. • Conic combination if λi ≥ 0 for every i. Pm • Convex combination if i=1 λi = 1 and λi ≥ 0 for every i. In the following, λ will still denote a scalar (since we consider in real spaces, λ is a real number). The linear space spanned by X = fx1; : : : ; xmg (also called the span of X), denoted by Span(X), is the set of n n points x of R which can be expressed as linear combinations of x1; : : : ; xm. Given a set X of R , the span of X is the smallest vectorial space containing the set X. In the following we will consider a little bit further the other types of combinations. Pm A set x1; : : : ; xm of vectors are linearly independent if i=1 λixi = 0 implies that for every i ≤ m, λi = 0. The dimension of the space spanned by x1; : : : ; xm is the cardinality of a maximum subfamily of x1; : : : ; xm which is linearly independent. The points x0; : : : ; x` of an affine space are said to be affinely independent if the vectors x1−x0; : : : ; x`− x0 are linearly independent. In other words, if we consider the space to be “centered” on x0 then the vectors corresponding to the other points in the vectorial space are independent.