Real-Time Sphere Sweeping Stereo from Multiview Fisheye Images
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Capture4vr: from VR Photography to VR Video
Capture4VR: From VR Photography to VR Video Christian Richardt Peter Hedman Ryan S. Overbeck University of Bath University College London Google LLC [email protected] [email protected] [email protected] Brian Cabral Robert Konrad Steve Sullivan Facebook Stanford University Microsoft [email protected] [email protected] [email protected] ABSTRACT from VR photography to VR video that began more than a century Virtual reality (VR) enables the display of dynamic visual content ago but which has accelerated tremendously in the last five years. with unparalleled realism and immersion. However, VR is also We discuss both commercial state-of-the-art systems by Facebook, still a relatively young medium that requires new ways to author Google and Microsoft, as well as the latest research techniques and content, particularly for visual content that is captured from the real prototypes. Course materials will be made available on our course world. This course, therefore, provides a comprehensive overview website https://richardt.name/Capture4VR. of the latest progress in bringing photographs and video into VR. ACM Reference Format: Ultimately, the techniques, approaches and systems we discuss aim Christian Richardt, Peter Hedman, Ryan S. Overbeck, Brian Cabral, Robert to faithfully capture the visual appearance and dynamics of the Konrad, and Steve Sullivan. 2019. Capture4VR: From VR Photography to real world, and to bring it into virtual reality to create unparalleled VR Video. In Proceedings of SIGGRAPH 2019 Courses. ACM, New York, NY, realism and immersion by providing freedom of head motion and USA,2 pages. https://doi.org/10.1145/3305366.3328028 motion parallax, which is a vital depth cue for the human visual system. -
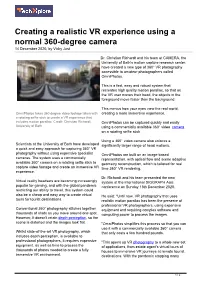
Creating a Realistic VR Experience Using a Normal 360-Degree Camera 14 December 2020, by Vicky Just
Creating a realistic VR experience using a normal 360-degree camera 14 December 2020, by Vicky Just Dr. Christian Richardt and his team at CAMERA, the University of Bath's motion capture research center, have created a new type of 360° VR photography accessible to amateur photographers called OmniPhotos. This is a fast, easy and robust system that recreates high quality motion parallax, so that as the VR user moves their head, the objects in the foreground move faster than the background. This mimics how your eyes view the real world, OmniPhotos takes 360 degree video footage taken with creating a more immersive experience. a rotating selfie stick to create a VR experience that includes motion parallax. Credit: Christian Richardt, OmniPhotos can be captured quickly and easily University of Bath using a commercially available 360° video camera on a rotating selfie stick. Using a 360° video camera also unlocks a Scientists at the University of Bath have developed significantly larger range of head motions. a quick and easy approach for capturing 360° VR photography without using expensive specialist OmniPhotos are built on an image-based cameras. The system uses a commercially representation, with optical flow and scene adaptive available 360° camera on a rotating selfie stick to geometry reconstruction, which is tailored for real capture video footage and create an immersive VR time 360° VR rendering. experience. Dr. Richardt and his team presented the new Virtual reality headsets are becoming increasingly system at the international SIGGRAPH Asia popular for gaming, and with the global pandemic conference on Sunday 13th December 2020. -

Capture, Reconstruction, and Representation of the Visual Real World for Virtual Reality
Capture, Reconstruction, and Representation of the Visual Real World for Virtual Reality Christian Richardt1[0000−0001−6716−9845], James Tompkin2[0000−0003−2218−2899], and Gordon Wetzstein3[0000−0002−9243−6885] 1 University of Bath [email protected] https://richardt.name/ 2 Brown University james [email protected] http://jamestompkin.com/ 3 Stanford University [email protected] http://www.computationalimaging.org/ Abstract. We provide an overview of the concerns, current practice, and limita- tions for capturing, reconstructing, and representing the real world visually within virtual reality. Given that our goals are to capture, transmit, and depict com- plex real-world phenomena to humans, these challenges cover the opto-electro- mechancial, computational, informational, and perceptual fields. Practically pro- ducing a system for real-world VR capture requires navigating a complex design space and pushing the state of the art in each of these areas. As such, we outline several promising directions for future work to improve the quality and flexibility of real-world VR capture systems. Keywords: Cameras · Reconstruction · Representation · Image-Based Rendering · Novel-view synthesis · Virtual reality 1 Introduction One of the high-level goals of virtual reality is to reproduce how the real world looks in a way which is indistinguishable from reality. Achieving this arguably-quixotic goal requires us to solve significant problems across capture, reconstruction, and represen- tation, and raises many questions: “Which camera system should we use to sample enough of the environment for our application?”; “How should we model the world and which algorithm should we use to recover these models?”; “How should we store the data for easy compression and transmission?”, and “How can we achieve simple and high-quality rendering for human viewing?”. -

Photography Techniques Intermediate Skills
Photography Techniques Intermediate Skills PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Wed, 21 Aug 2013 16:20:56 UTC Contents Articles Bokeh 1 Macro photography 5 Fill flash 12 Light painting 12 Panning (camera) 15 Star trail 17 Time-lapse photography 19 Panoramic photography 27 Cross processing 33 Tilted plane focus 34 Harris shutter 37 References Article Sources and Contributors 38 Image Sources, Licenses and Contributors 39 Article Licenses License 41 Bokeh 1 Bokeh In photography, bokeh (Originally /ˈboʊkɛ/,[1] /ˈboʊkeɪ/ BOH-kay — [] also sometimes heard as /ˈboʊkə/ BOH-kə, Japanese: [boke]) is the blur,[2][3] or the aesthetic quality of the blur,[][4][5] in out-of-focus areas of an image. Bokeh has been defined as "the way the lens renders out-of-focus points of light".[6] However, differences in lens aberrations and aperture shape cause some lens designs to blur the image in a way that is pleasing to the eye, while others produce blurring that is unpleasant or distracting—"good" and "bad" bokeh, respectively.[2] Bokeh occurs for parts of the scene that lie outside the Coarse bokeh on a photo shot with an 85 mm lens and 70 mm entrance pupil diameter, which depth of field. Photographers sometimes deliberately use a shallow corresponds to f/1.2 focus technique to create images with prominent out-of-focus regions. Bokeh is often most visible around small background highlights, such as specular reflections and light sources, which is why it is often associated with such areas.[2] However, bokeh is not limited to highlights; blur occurs in all out-of-focus regions of the image. -

Besut Campus Virtual Reality (Vr) 360 Degree Panoramic View
BESUT CAMPUS VIRTUAL REALITY (VR) 360 DEGREE PANORAMIC VIEW MUHAMMAD NAUFAL BIN FARID BACHELOR OF INFORMATION TECHNOLOGY (INFORMATIC MEDIA) WITH HONOURS UNIVERSITI SULTAN ZAINAL ABIDIN 2018 BESUT CAMPUS VIRTUAL REALITY (VR) 360 DEGREE PANORAMIC VIEW MUHAMMAD NAUFAL BIN FARID Bachelor Of Information Technology (Informatic Media) With Honours Universiti Sultan Zainal Abidin,Terengganu,Malaysia DECEMBER 2018 DECLARATION I hereby declare that this report is based on my original work except for quotations and citations, which have been duly acknowledged. I also declare that it has not been previously or concurrently submitted for any other degree at Universiti Sultan Zainal Abidin or other institutions ________________________________ Name : Muhammad Naufal bin Farid Date : 23 December 2018 i CONFIRMATION This is to confirm that: The research conducted and the writing of this report was under my supervision. ________________________________ Name : Dr Ismahafezi bin Ismail Tarikh : 23 December 2018 ii DEDICATION In the Name of Allah, the Most Gracious and the Most Merciful. Alhamdulillah, I thank God for His grace and grace, I can prepare and complete this report successfully. I am grateful and would like to express my sincere gratitude to my supervisor, Dr Ismahafezi bin Ismail for his invaluable guidance, continuous encouragement and constant support in making this research possible. I really appreciate his guidance from the initial to the final level that enabled me to develop an understanding of this project thoroughly. Without his advice and assistance, it would be a lot tougher for completion. I also sincerely thanks for the time spent proofreading and correcting my mistakes. I acknowledge my sincere indebtedness and gratitude to my parents for their love, dream and sacrifice throughout my life. -
![Arxiv:2103.05842V1 [Cs.CV] 10 Mar 2021 Generators to Produce More Immersive Contents](https://docslib.b-cdn.net/cover/4390/arxiv-2103-05842v1-cs-cv-10-mar-2021-generators-to-produce-more-immersive-contents-1964390.webp)
Arxiv:2103.05842V1 [Cs.CV] 10 Mar 2021 Generators to Produce More Immersive Contents
LEARNING TO COMPOSE 6-DOF OMNIDIRECTIONAL VIDEOS USING MULTI-SPHERE IMAGES Jisheng Li∗, Yuze He∗, Yubin Hu∗, Yuxing Hany, Jiangtao Wen∗ ∗Tsinghua University, Beijing, China yResearch Institute of Tsinghua University in Shenzhen, Shenzhen, China ABSTRACT Omnidirectional video is an essential component of Virtual Real- ity. Although various methods have been proposed to generate con- Fig. 1: Our proposed 6-DoF omnidirectional video composition tent that can be viewed with six degrees of freedom (6-DoF), ex- framework. isting systems usually involve complex depth estimation, image in- painting or stitching pre-processing. In this paper, we propose a sys- tem that uses a 3D ConvNet to generate a multi-sphere images (MSI) representation that can be experienced in 6-DoF VR. The system uti- lizes conventional omnidirectional VR camera footage directly with- out the need for a depth map or segmentation mask, thereby sig- nificantly simplifying the overall complexity of the 6-DoF omnidi- rectional video composition. By using a newly designed weighted sphere sweep volume (WSSV) fusing technique, our approach is compatible with most panoramic VR camera setups. A ground truth generation approach for high-quality artifact-free 6-DoF contents is proposed and can be used by the research and development commu- nity for 6-DoF content generation. Index Terms— Omnidirectional video composition, multi- Fig. 2: An example of conventional 6-DoF content generation sphere images, 6-DoF VR method 1. INTRODUCTION widely available high-quality 6-DoF content that -

Shooting Panoramas and Virtual Reality
4104_ch09_p3.qxd 6/25/03 11:17 PM Page 176 4104_ch09_p3.qxd 6/25/03 11:17 PM Page 177 Shooting Panoramas and Virtual Reality With just a little help from special software, you can extend the capabilities of your digital camera to create stunning panoramas and enticing virtual reality (VR) images. This chapter shows you how to shoot—and create— images that are not only more beautiful, but 177 ■ also have practical applications in the commer- SHOOTING PANORAMAS AND VIRTUAL REALITY cial world as well. Chapter Contents 9 Panoramas and Object Movies Shooting Simple Panoramas Extending Your View Object Movies Shooting Tips for Object Movies Mikkel Aaland Mikkel 4104_ch09_p3.qxd 6/25/03 11:18 PM Page 178 Panoramas and Object Movies Look at Figure 9.1. It’s not what it seems. This panorama is actually comprised of several images “stitched” together using a computer and special software. Because of the limitations of the digital camera’s optical system, it would have been nearly impos- sible to make this in a single shot. Panoramas like this can be printed, or with an extended angle of view and more software help, they can be turned into interactive virtual reality (VR) movies viewable on a computer monitor and distributed via the Web or on a CD. Figure 9.1: This panorama made by Scott Highton using a Nikon Coolpix 990 is comprised of 178 four adjacent images, “stitched” together using Photoshop Elements’ 2 Photomerge plug-in. ■ If you look at Figure 9.2 you’ll see another example where software was used to extend the capabilities of a digital camera. -

2017 Provost's Learning Innovations Grants
2017 Provost’s Learning Innovations Grants 2017 PROVOST’S LEARNING INNOVATIONS GRANTS APPLICATION INSTRUCTIONS 1. Complete this Application Form, in its entirety, and save as “Lastname_Firstname_APP” (using your name). 2. Complete the Budget Worksheet and save as “Lastname_Firstname_BUDGET” (using your name). 3. Ask your Department Head to complete the Department Head Certification, scan and save as, “Lastname_Firstname_SIG” (using your name). 4. Email all documents to [email protected], no later than 11:59pm EST, January 25, 2017. If you have any questions about completing this application, please email [email protected], or contact Michael Starenko at 585-475-5035 or [email protected]. APPLICANT INFORMATION This application is for a: Exploration Grant x Focus Grant Principal Applicant name: Jennifer Poggi Faculty title: Assistant Professor Email: [email protected] Phone: (202)510-1079 (Full-time only) College: CIAS Department: SPAS / Photojournalism Department Head name: Therese Mulligan __________________________________ Email: [email protected] Others involved in the project (if any): Nitin Simpat, Josh Meltzer, Susan Lakin, Juilee Decker, Joe Geigel Project name: Exploring VR/360 Video Through Interdisciplinary Experiential Student Learning Total funds requested (as calculated on the budget worksheet): $5000.00 (requests of $1,000 to $5,000 will be considered) 3 2017 Provost’s Learning Innovations Grants BUDGET There is a fillable PDF worksheet to calculate your budget. You can download the worksheet at rit.edu/ili/plig. • The total shown on this worksheet must match the “Total funds requested” in the Applicant Information section of this application form • If awarded, additional funds will be provided to cover any benefits and ITS expenses associated with the salary budget requested • Note that any equipment or other materials purchased with grant funds are the property of your department and revert to the department after your project is completed TIMELINE Please indicate any variances to the planned PLIG 2017 schedule and your reasons. -
Joe Farace Barry Staver
Better Available Light Digital Photography This page intentionally left blank Better Available Light Digital Photography How to Make the Most of Your Night and Low-Light Shots Second Edition Joe Farace Barry Staver AMSTERDAM • BOSTON • HEIDELBERG • LONDON NEW YORK • OXFORD • PARIS • SAN DIEGO SAN FRANCISCO • SINGAPORE • SYDNEY • TOKYO Focal Press is an imprint of Elsevier Associate Acquisitions Editor: Valerie Geary Publishing Services Manager: George Morrison Project Manager: Mónica González de Mendoza Marketing Manager: Kate lanotti Cover Design: Eric DeCicco Cover image: © Joe Farace Focal Press is an imprint of Elsevier 30 Corporate Drive, Suite 400, Burlington, MA 01803, USA Linacre House, Jordan Hill, Oxford OX2 8DP, UK © 2009 Joe Farace and Barry Staver. Published by Elsevier, Inc. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior written permission of the publisher. Permissions may be sought directly from Elsevier’s Science & Technology Rights Department in Oxford, UK: phone: (+44) 1865 843830, fax: (+44) 1865 853333, E-mail: [email protected]. You may also complete your request online via the Elsevier homepage (http://elsevier.com), by selecting “Support & Contact” then “Copy- right and Permission” and then “Obtaining Permissions.” Recognizing the importance of preserving what has been written, Elsevier prints its books on acid-free paper whenever possible. Library of Congress Cataloging-in-Publication Data Farace, Joe. Better available light digital photography : how to make the most of your night and low-light shots / Joe Farace, Barry Staver. -
Framing the Virtual Reality Documentary GENRE DEFINITIONS, POLITICS of CANONIZATION and the CHALLENGING of the DOCUMENTARY TRADITION
Framing the Virtual Reality Documentary GENRE DEFINITIONS, POLITICS OF CANONIZATION AND THE CHALLENGING OF THE DOCUMENTARY TRADITION Martyna Turska | 6243983 | [email protected] Research Master Media, Art and Performance Supervisor: dr. Stefan Werning Second reader: dr. René Glas August 2019 Abstract Documentary-making has always adapted dynamically to the affordances of new technologies. This thesis focuses on a new corpus of virtual reality (VR) documentaries, whose appearance calls for contemplation of the aesthetic and political implications of VR technology in the context of their impact on the ‘documentary tradition’. It suggests steps in the conceptualization of the VR documentary practice, understood as a new medium that draws from – and builds upon – traditional documentary conventions. First, through a comparative case study of the cinematic (2014) and VR (2016) versions of the documentary Notes on Blindness, the author claims that VR documentaries appropriate many of the documentary genre’s rhetorical and aesthetic tropes for ‘authentic’ representation of lived experience – yet they also carry separate meanings and call for different representational structures. Next, it is argued that in order to strive for a more in-depth understanding of the VR doc, it is necessary to form typologies and canonizations (as for any earlier genre). Hence, drawing from the theoretical analysis of processes of ‘canonization’ and ‘typologization’ in earlier media contexts, the thesis explores questions of power structure and dynamics between the agents responsible for canon-creation with regard to VR documentaries. The author proposes a more procedural understanding of canon as something that is practiced rather than ‘set in stone’. -

IMMERSIVE MEDIA a STATE of the INDUSTRY May 2017
IMMERSIVE MEDIA A STATE OF THE INDUSTRY May 2017 VR/AR Project VR/AR Project vrarproject.com [email protected] VR/AR Project New Amsterdam Media 1 VR/AR Project May 1, 2017 Rev 3.0 Editor: Seth Shapiro Deputy Editors: Bryce Paul & Andriy Pishchalenko Contributors: Perisa Brown, John Canning, Amy Dai, Xingting Gu, Hudson Leiser, Francisco Serna, Kinsey Thompson V2 Seth Shapiro 2016 Andriy Pishchalenko V1 Seth Shapiro 2015 Andriy Pishchalenko [email protected] VR/AR Project New Amsterdam Media 2 VR/AR Project [email protected] VR/AR Project New Amsterdam Media 3 VR/AR Project THIS IS AN OPEN COMMUNITY PROJECT. THIS IS A SNAPSHOT OF A RAPIDLY EVOLVING LANDSCAPE. TO OPT IN FOR FUTURE VERSIONS OF THIS PAPER, JOIN US AT VRARPROJECT.COM EMAIL US AT [email protected] [email protected] VR/AR Project New Amsterdam Media 4 VR/AR Project TABLE OF CONTENTS I 1. Preface 7 2. Overview 8 3. Enterprise Use Cases 9 Advertising & Marketing 9 Aerospace & Defense 11 Construction 12 Education 14 Entertainment 15 Fashion 18 Finance 19 Gaming 21 Healthcare 24 Live Events 26 Real Estate 28 Retail 29 Training 31 Travel & Hospitality 32 4. Computer Rendered VR 35 5. Live Action VR 37 6. Web VR 38 7. Social VR 39 8. Location-Based VR 42 Theme parks 42 VRcades 44 9. Smartphone VR/AR 46 10. VR Head Mounted Displays (HMDs) 49 11. AR/MR Head Mounted Displays (HMDs) 54 12. Spatial Audio 59 13. Haptics, Accessories, and Control Systems 63 Omnidirectional Treadmills 66 Exercise and fitness 29 Haptic Suits 64 Galvanic Vestibular Stimulation (GVS) 67 [email protected] VR/AR Project New Amsterdam Media 5 VR/AR Project TABLE OF CONTENTS II Advanced movement tracking 66 14. -

High Dynamic Range Imaging
Course Developer: Kirt Witte, Professor, Savannah College of Art and Design Course Name: High Dynamic Range Imaging Course Description: High Dynamic Range Imaging (HDRi) emphasizes the integration of computer-generated objects or characters into real world video or film footage. High Dynamic Range Imaging seeks to develop and integrate photography, lighting, and rendering into various 3D and 2D software applications by utilizing digital images containing light information more accurately than traditional digital imaging means. Prerequisite: “Intro to Maya” Course Goals: The following course goals articulate the general objectives and purpose of this course: Learn how to integrate HDR images into various professional 3D and compositing applications. Learn how to use tone mapping. Learn how to cubic and spherical imagery for use in HDR images and reflection maps. Learn how to generate entirely computer generated spherical HDR files. Learn how to dramatically increase the overall apparent quality level of lighting accuracy. Experience how to create/use their own HDR imagery using various photographic methods. Gain exposure to various cinematographers and photographers and how they influence the VSFX industry today. Course Outcomes: The following course outcomes indicate competencies and measurable skills that students develop as a result of completing this course: Demonstrate the creation of HDR images for use in 3D animations as well as for compositing CG characters or CG elements into live action video or film footage. Demonstrate how photography is used in various aspects of the VSFX industry. Evaluate and problem solve whether or not HDR or "traditional lighting" methods should be used for a specific project. Explain how tone mapping, image-based lighting, and high dynamic range images are used in the VSFX industry.