Chapter 3 Part 2: Coordinate Systems
I think, therefore I exist.
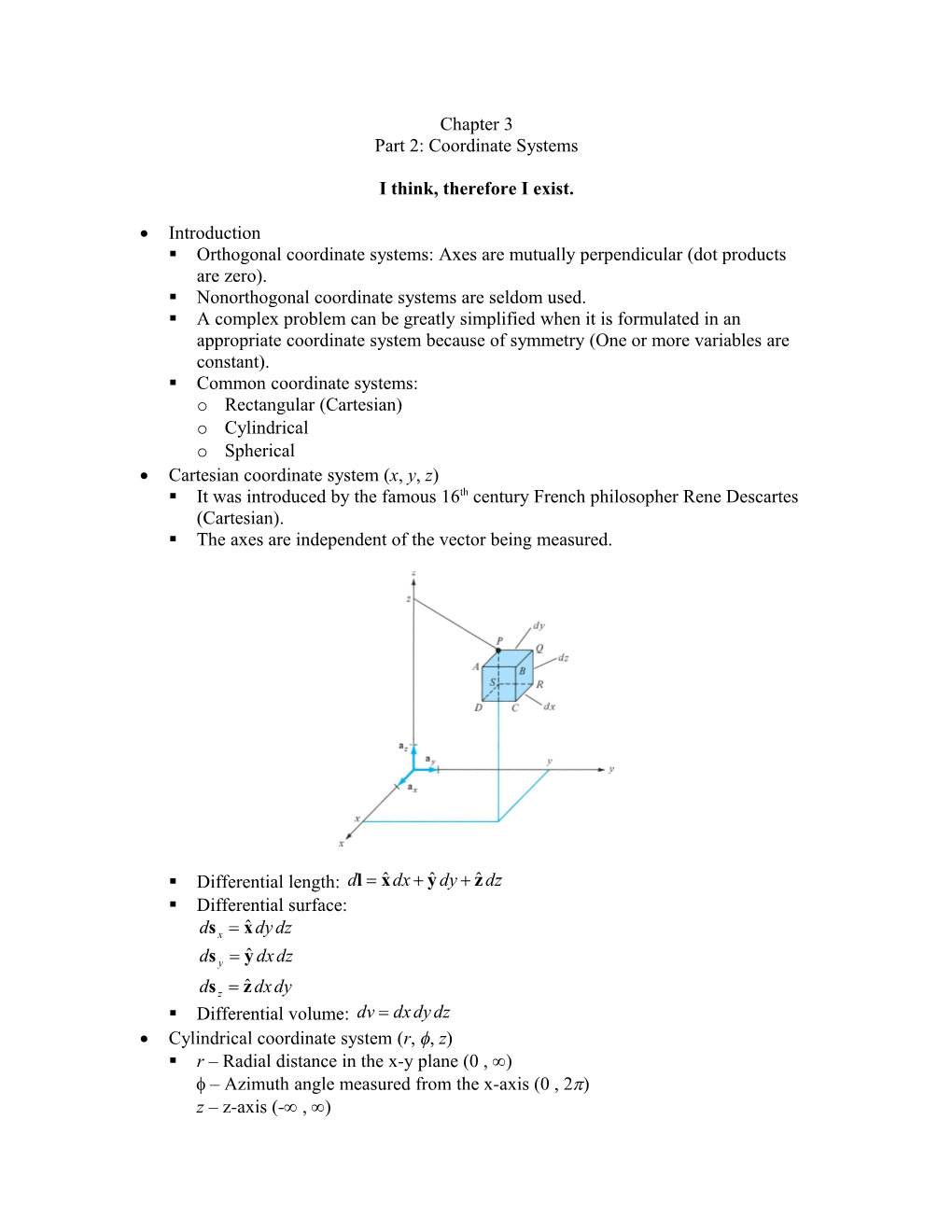
Introduction . Orthogonal coordinate systems: Axes are mutually perpendicular (dot products are zero). . Nonorthogonal coordinate systems are seldom used. . A complex problem can be greatly simplified when it is formulated in an appropriate coordinate system because of symmetry (One or more variables are constant). . Common coordinate systems: o Rectangular (Cartesian) o Cylindrical o Spherical Cartesian coordinate system (x, y, z) . It was introduced by the famous 16th century French philosopher Rene Descartes (Cartesian). . The axes are independent of the vector being measured.
. Differential length: dl xˆ dx yˆ dy zˆ dz . Differential surface:
ds x xˆ dy dz
ds y yˆ dxdz
ds z zˆ dxdy . Differential volume: dv dxdy dz Cylindrical coordinate system (r, , z) . r – Radial distance in the x-y plane (0 , ) – Azimuth angle measured from the x-axis (0 , 2) z – z-axis (- , ) . Only the z-axis is independent of the vector being measured.
. Orthogonal relationship: rˆ ˆ zˆ ˆ zˆ rˆ zˆ rˆ ˆ rˆ rˆ 1 ˆˆ 1 zˆ zˆ 1 rˆ rˆ 0 ˆˆ 0 zˆ zˆ 0
. Differential elements: dlr = dr, dl = r d, dlz = dz. . Differential length: dl rˆ dr ˆ r d zˆ dz . Differential surface:
dsr rˆ r d dz ˆ ds dr dz
ds z zˆ r d dr . Differential volume: dv r dr d dz Spherical coordinate system (R, , ) . R – Radial distance from the origin (0 , ) – Zenith angle measured from the z-axis (0 , ) – Azimuth angle measured from the x-axis (0 , 2) . The axes are dependent of the vector being measured. . Orthogonal relationship: Rˆ ˆ ˆ ˆ ˆ Rˆ ˆ Rˆ ˆ Rˆ Rˆ 1 ˆ ˆ 1 ˆ ˆ 1 Rˆ Rˆ 0 ˆ ˆ 0 ˆ ˆ 0 . Differential elements: . dlR = dR,
. dl = R d,
. dl = R sin d ˆ ˆ ˆ . Differential length: dl R dlR R d Rsin dl . Differential surface: ˆ 2 ds R R R sin d d ˆ ds Rsin dR d ˆ ds R dRd . Differential volume: dv R2 sin dR d d Coordinate system transformation: Caution – The sign of tan-1: = tan-1(b/a) if a > 0 = 180 + tan-1(b/a) if a < 0 MatLab commands: . Rectangular to spherical: [th,phi,R]=cart2sph(x,y,z) EDU» [th,phi,R]=cart2sph(1,2,3) th = 1.1071 phi = 0.9303 R = 3.7417 . Spherical to rectangular: [x,y,z]=sph2cart(th,phi,R) EDU» [x,y,z]=sph2cart(1,2,3) x = -0.6745 y = -1.0505 z = 2.7279 . Rectangular to cylindrical: [phi,r,z]=cart2pol(x,y,z) EDU» [phi,r,z]=cart2pol(1,2,3) phi = 1.1071 r = 2.2361 z = 3 . Cylindrical to rectangular: [x,y,z]=pol2cart(th,r,z) EDU» [x,y,z]=pol2cart(1,2,3) x = 1.0806 y = 1.6829 z = 3 Distance between two points: 2 2 2 . Rectangular: d x2 x1 y2 y1 z2 z1 2 2 2 . Cylindrical: d r2 r1 2r2r1 cos(2 1) z2 z1 2 2 . Spherical: d R2 R1 2R2 R1cos 2 cos1 sin 2 sin1 cos(2 1 )
. Example:x1 1 y1 2 z1 3 x2 4 y2 5 z2 6
2 2 2 2 r1 x1 y1 r1 2.236 r2 x2 y2 r2 6.403
y1 y2 1 atan 1 63.435 deg 2 atan 2 51.34 deg x1 x2 2 2 2 2 2 2 R1 x1 y1 z1 R1 3.742 R2 x2 y2 z2 R2 8.775
2 2 2 2 x1 y1 x2 y2 1 atan 1 36.699 deg 2 atan 2 46.862 deg z1 z2
2 2 2 x2 x1 y2 y1 z2 z1 5.196
2 2 2 r2 r1 2r1r2cos2 1 z2 z1 5.196
2 2 R2 R1 2R1R2cos2cos1 sin1sin2cos2 1 5.196