Analysis and Synthesis: (Plan Form)
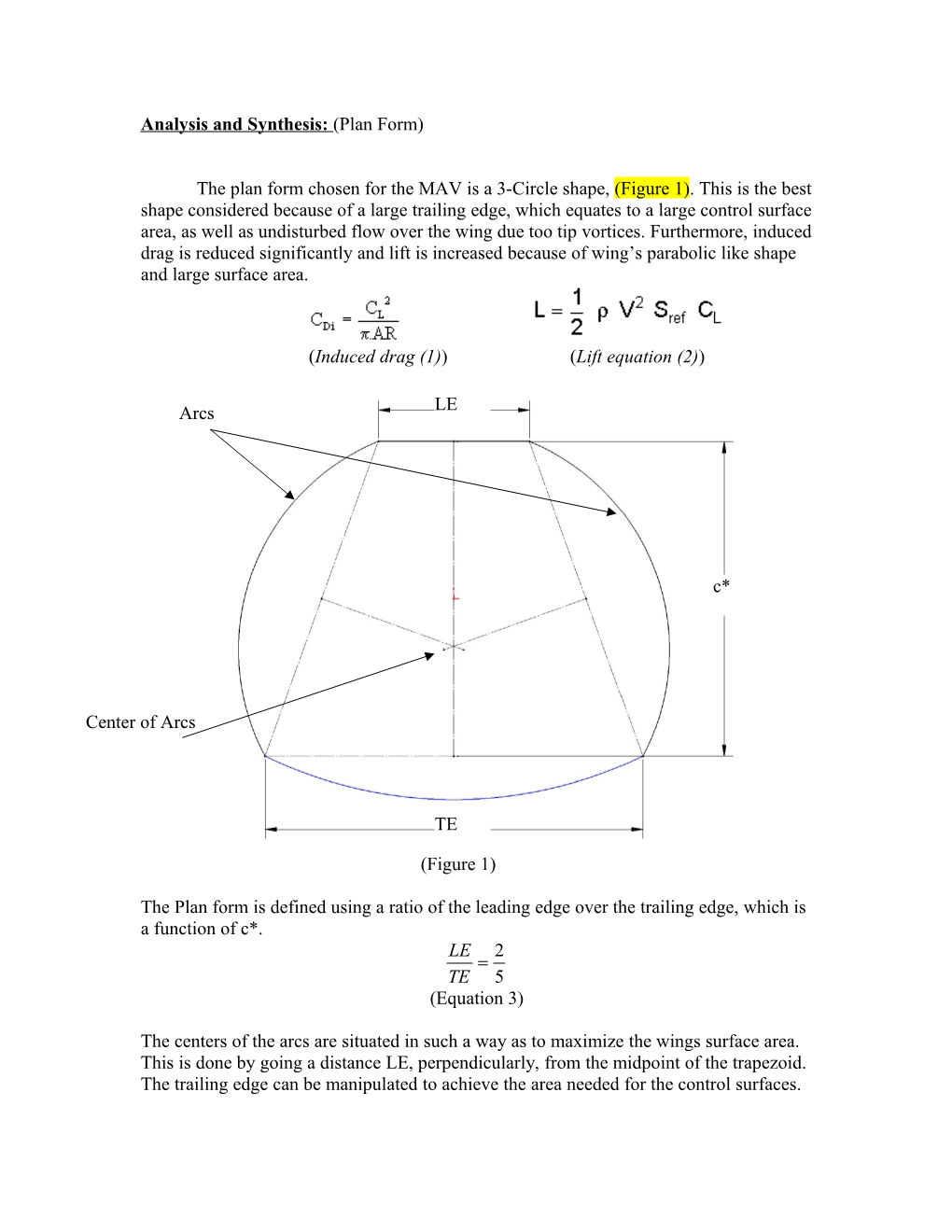
The plan form chosen for the MAV is a 3-Circle shape, (Figure 1). This is the best shape considered because of a large trailing edge, which equates to a large control surface area, as well as undisturbed flow over the wing due too tip vortices. Furthermore, induced drag is reduced significantly and lift is increased because of wing’s parabolic like shape and large surface area.
(Induced drag (1)) (Lift equation (2))
Arcs LE
c*
Center of Arcs
TE
(Figure 1)
The Plan form is defined using a ratio of the leading edge over the trailing edge, which is a function of c*. LE 2 TE 5 (Equation 3)
The centers of the arcs are situated in such a way as to maximize the wings surface area. This is done by going a distance LE, perpendicularly, from the midpoint of the trapezoid. The trailing edge can be manipulated to achieve the area needed for the control surfaces. Furthermore, the plan form is defined so that certain parameters can be scaled. Looking at Figure 2 notice that as the Surface Area increases the Aspect Ratio is held relatively constant. Therefore, scaling this wing will not affect its performance drastically. This analysis reinforces the earlier notion, made in the feasibility analysis, that since the surface area is more important then the aspect ratio we can develop wings with large surface areas, creating more lift, and not worry about performance. c * c * 1.2 AR 1.46 1 AR 1.38 TE TE
80 b MLD s AR 70 b (g = 1.2) MLD (g = 1.2) s (g = 1.2) AR (g= 1.2)
60 ) 2 ^ n i 50 ( a e r A
e 40 c a f r u S 30
20 Aspect Ratio
10
0 5 5.5 6 6.5 7 7.5 8 Chord Length (in) (Figure 2) However, what is shown in Figure 2 is that as the maximum linear dimension decreases so does our surface area. When this is compared to Figure 3 we see that the aircraft will need to fly at much faster speeds to create the same amount of lift as the maximum linear dimension is decreased.
CLD of a 3-D wing (Figure 3) MLD = 10 in 14
12 MLD = 7 in
10 ) s / 8 m ( y t i c
o 6 l e V
4
2 MLD = 10 in
0 0 0.2 0.4 0.6 0.8 1 1.2
CLD of a 3-D wing (Figure 3)
The airfoil choice at the root has a 6% camber and at the tip it has a 5% camber this is done because the propeller slip stream is over the center of the wing and an airfoil with a higher camber behaves better in high Reynolds Number environments. 5% camber was used at the tips because a lower camber works better at lower angles of attack and also decreases the tip vortices. The plane will be flying at a trim angle of attack of 5 degrees; this is explained earlier in the airfoil analysis. Furthermore, because of the elliptic lift distribution there will be less induced drag and when going from a 5% to a 6% camber dihedral will be added, which will benefit our stability in Roll. The next step is to analyze the different plan forms in LinAir. “LinAir calculates the aerodynamic characteristics of one or more lifting surfaces. The wings may be tapered, twisted, and swept with any dihedral angle. The program then computes the lift, drag, pitching moment, and lift distribution over each element. The angle of attack, twist, incidence angles, etc. may then be changed in order to trim the aircraft, to minimize drag, or simply to examine the effects of various design changes. The program is ideal for computing the basic aerodynamics of a single wing or the interference of a wing and canard system, the effect of winglets on induced drag, or the tail size required for a given stability level. By placing several wing elements right behind each other, the effect of camber or control surface deflections can be evaluated [Aeronautics, 1].” Analysis and Synthesis: (Vertical Tail)
From analysis done for a yawing angle of 2 degrees the aircraft will need a vertical tail with a surface area of .12139 in^2. From the research done it was found that the more stable our aircraft is the larger the vertical tail must be, refer to Figure 4. It should be noted that this analysis is based on the fact that our payload area can be centered on the center of gravity. Therefore the only Yaw resulting from a side velocity would be from the projected area of the wing, the propeller and motor, and the vertical tail.
Kn K RLS fs Lf dCL l S f v l X l (c X ) l d vmin m v m v 2 max
Fin Area vs Yaw Angle
2.5
2
) 1.5 2 ^ n i (
a e r A
n i
F 1
Sv max Sv min
0.5
0 0 5 10 15 20 25 30 Beta (deg) (Figure 4)
However, Figure 4 also shows that a Assumptions: very small vertical tail will be needed for Krl = 1 our application. Therefore, Qv=Qw experimentation must be done in Senior dCl/d= .0487(1/deg)* Design 2 to see whether or not a fin is needed. A Step Method will be implemented for this testing. The fin does have a stabilizing effect in Roll as well. However the roll dynamic damping coefficient, Clp is a function of * From Figure 5 span. This means that the vertical tail is not as important as the plan form shape when in Roll.
8" X 8" Flat Plate, Re100000, CL vs Angle of Attack y = 0.0487x - 0.0398 1.2 Automated Testing Torres Data 1 Discrete Method Run Method Mechanical Balance 0.8 Linear (Torres Data) t f i L
f
o 0.6
t n e i c i f f 0.4 e o C
0.2
0 -5 0 5 10 15 20 25
-0.2 Angle of Attack (Degrees) (Figure 5)
References: Desktop Aeronautics. "LinAir 4." Desktop Aeronautics. 11 Feb. 2006
Figure 5 "8' X 8' Flat Plate, Re 100000, CL vs Angle of Attack." Chart. Rochester Institute of Technology. May 2005. Modification of a Longitudinal Wind Tunnel Balance for Identification of Micro Air Vehicle Instabilities. By Joshua A. Shreve. Rochester: Rochester Institute of Technology, 2005. 50.