Chapter III – Measurement systems with electrical signals
- Amplifiers using operational amplifiers:
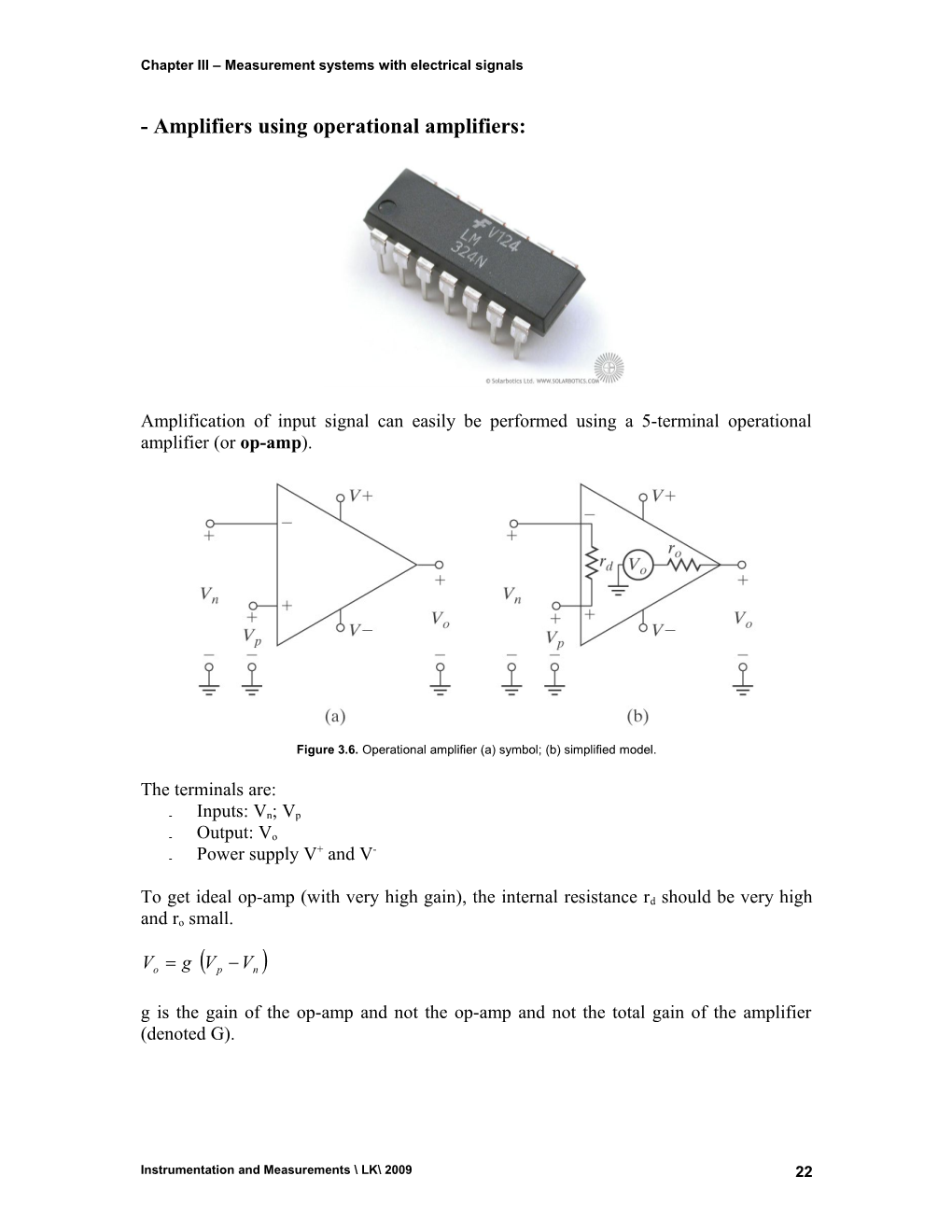
Amplification of input signal can easily be performed using a 5-terminal operational amplifier (or op-amp).
Figure 3.6. Operational amplifier (a) symbol; (b) simplified model.
The terminals are: - Inputs: Vn; Vp - Output: Vo + - - Power supply V and V
To get ideal op-amp (with very high gain), the internal resistance rd should be very high and ro small.
Vo g V p Vn g is the gain of the op-amp and not the op-amp and not the total gain of the amplifier (denoted G).
Instrumentation and Measurements \ LK\ 2009 22 Chapter III – Measurement systems with electrical signals
- Non-inverting amplifiers
A simple amplifier can be built using an op-amp called non-inverting amplifier. A non- inverting op-amp is a feedback loop circuit where the output Vo is connected to the negative input. Such op-amps are called non-inverting because Vo has the same sign as the input (with respect to the ground). The role of the feedback loop is to determine the characteristic of the amplifier (based on op-amp amplifiers) for example the gain.
Let us analyze our op-amp:
Figure 3.7. Non-inverting op-amp.
V I o We have: R1 R1 R2
V V I R and n B R1 1
R 1 Then: Vo gV p Vn gVi Vo R1 R2
g Vi Vo So: R1 1 g R1 R2 However we stated that g is very high for an op-amp, then:
Vi Vo V R R o 1 2 G 1 and Vi R1 R1 R2
As a conclusion, the gain of the amplifier is only a function of R1 and R2 (range: 1 k to 1 M).
Instrumentation and Measurements \ LK\ 2009 23 Chapter III – Measurement systems with electrical signals
NOTE: High R complicate the design. Low R lead to high consumption.
It should be noted that the op-amp can reach output saturation if the output (Vo) approaches the power supply.
The ideal behavior (infinite bandwidth) described above is only valid if the input signal is DC voltage or AC at low frequency. In reality, an op-amp has a certain, limited, bandwidth. The gain remains constant until a certain cutoff frequency fc and then it starts to decrease at a rate of 6 dB/octave. In reality the gain starts to decrease a bit before fc.
Figure 3.8. Gain vs. frequency for an op-amp.
The cutoff frequency is inversely proportional to the value of the gain at low frequency. This relation can be defined using the gain-bandwidth product (GBP):
GPB f c G
The value of GPB is a characteristic of the op-amp. This relation shows a limit on the bandwidth for high gains. A simple way to avoid this is to put several op-amp in series. The gain will remain constant, and the bandwidth will significantly increase.
In contrast to the gain, the phase angle between the input and the output is strongly related to frequency. For a non-inverting amplifier:
1 f tan f c
Instrumentation and Measurements \ LK\ 2009 24 Chapter III – Measurement systems with electrical signals
Example A non-inverting amplifier is to be constructed with an op-amp (GPB= 1MHz). It is to have a gain of 100.
- Specify values for the two resistors. - Sketch the Bode plots for this amplifier.
- Inverting amplifiers: In this case the output signal has an opposite sign when compared with the input signal. This kind of amp-op is currently used in filters, integrators and differentiators.
Figure 3.9. Inverting op-amp.
R For these amplifiers, the gain is: G 2 R1
One major difference between a non-inverting and inverting amplifier is that the input impedance of an inverting amplifier is relatively small (less than 100 , same order as R1) this may induce some loading problems.
The GPB for an inverting amplifier is:
R2 GPBinv GPBnoninv R1 R2
The phase response is analog to the one of a non-inverting amplifier.
In real life applications, amplifiers are generally connected to limit electrical noise effects.
Instrumentation and Measurements \ LK\ 2009 25