LARGE CCMPUTER SYSTEMS and NEW ARCHITECTURES T. Bloch
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Contrpl Data Nos Version 2 Administration Handbook
60459840 CONTRPL DATA NOS VERSION 2 ADMINISTRATION HANDBOOK /fP^v CDC® OPERATING SYSTEMS: CYBER 180 CYBER 170 CYBER 70 MODELS 71, 72, 73, 74 6000 REVISION RECORD T-gSZBZaSESEl jiito wminan REVISION DESCRIPTION Manual released; reflects NOS 2.3 at PSR level 617. Features include default charge restriction, (10-05-84) terminal input and output count at logoff, password randomization, a new CHARGE directive for the SUBMIT command, and support of the Mass Storage Archival Subsystem. Supports CYBER 180 computer systems. B Revision B reflects NOS 2.4.2 at PSR level 642. It incorporates new features such as support of (09-26-85) CYBER 180 Models 840, 850, 860, and 990, Printer Support Utility, and NAM Application Switching. Revision C reflects NOS 2.5.1 at PSR level 664. It documents the personal identification (09-30-86) v a l i d a t i o n , t h e s i n g l e t e r m i n a l s e s s i o n r e s t r i c t i o n , a n d o t h e r m i s c e l l a n e o u s t e c h n i c a l c h a n g e s . Revision D reflects NOS 2.6.1 at PSR level 700. It includes miscellaneous corrections and minor (04-14-88) additions. Publication No, 60459840 REVISION LETTERS I. O. Q. S. X AND Z ARE NOT USED. Address comments concerning this manual to: Control Data Technical Publications 4201 N. -

Musings RIK FARROWOPINION
Musings RIK FARROWOPINION Rik is the editor of ;login:. While preparing this issue of ;login:, I found myself falling down a rabbit hole, like [email protected] Alice in Wonderland . And when I hit bottom, all I could do was look around and puzzle about what I discovered there . My adventures started with a casual com- ment, made by an ex-Cray Research employee, about the design of current super- computers . He told me that today’s supercomputers cannot perform some of the tasks that they are designed for, and used weather forecasting as his example . I was stunned . Could this be true? Or was I just being dragged down some fictional rabbit hole? I decided to learn more about supercomputer history . Supercomputers It is humbling to learn about the early history of computer design . Things we take for granted, such as pipelining instructions and vector processing, were impor- tant inventions in the 1970s . The first supercomputers were built from discrete components—that is, transistors soldered to circuit boards—and had clock speeds in the tens of nanoseconds . To put that in real terms, the Control Data Corpora- tion’s (CDC) 7600 had a clock cycle of 27 .5 ns, or in today’s terms, 36 4. MHz . This was CDC’s second supercomputer (the 6600 was first), but included instruction pipelining, an invention of Seymour Cray . The CDC 7600 peaked at 36 MFLOPS, but generally got 10 MFLOPS with carefully tuned code . The other cool thing about the CDC 7600 was that it broke down at least once a day . -
Performing the Shuffle with the PM2I and Illiac SIMD Interconnection Networks
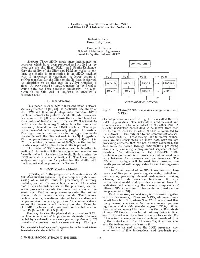
Performing the Shuffle with the PM2I and Illiac SIMD Interconnection Networks Robert R. Seban Howard Jay Siegel Purdue University School of Electrical Engineering West Lafayette, Indiana 47907 Abstract—Three SIMD single stage interconnection networks which have been proposed and studied in the literature are the Illiac, PM2I, and Shuffle-Exchange. Here the ability of the Illiac and PM2I networks to per- form the shuffle interconnection in an SIMD machine with N processors is examined. A lower bound of 3\/N/2 transfers for the Illiac to shuffle data is derived. An algorithm to do this task in 2\/N-l transfers is given. A lower bound of log2N transfers for the PM2I to shuffle data has been published previously. An algo- rithm to do this task in log2N + l in transfers is presented here. 1. Introduction This paper extends SIMD interconnection network studies presented in [28, 31]. In particular, the ability of Fig. 1: PE-to-PE SIMD machine configuration, with the PM2I and Illiac single stage interconnection SIMD machine networks to perform the shuffle interconnection NPEs. is examined. In [28] it is shown that a lower bound on of configuration is shown in Fig. 1. It is called the PE- the number of transfers needed for the PM2I network to to-PE organization. The network is unidirectional and perform the shuffle is log2N, where N is the number of connects each PE to some subset of the other PEs. A processing elements in the SIMD machine. The algo- transfer instruction causes data to be moved from each rithm presented here requires only (log2N) + l transfers. -

Mi!!Lxlosalamos SCIENTIFIC LABORATORY
LA=8902-MS C3b ClC-l 4 REPORT COLLECTION REPRODUCTION COPY VAXNMS Benchmarking 1-’ > .— u) 9 g .— mi!!lxLOS ALAMOS SCIENTIFIC LABORATORY Post Office Box 1663 Los Alamos. New Mexico 87545 — wAifiimative Action/Equal Opportunity Employer b . l)lS(”L,\l\ll K “Thisreport wm prcpmd J, an xcttunt ,,1”wurk ,pmwrd by an dgmcy d the tlnitwl SIdtcs (kvcm. mm:. Ncit her t hc llniml SIJIL.. ( Lwcrnmcm nor any .gcncy tlhmd. nor my 08”Ihcif cmployccs. makci my wur,nly. mprcss w mphd. or JwImL.s m> lcg.d Iululity ur rcspmuhdily ltw Ilw w.cur- acy. .vmplctcncs. w uscftthtc>. ttt”any ml’ormdt ml. dpprdl us. prudu.i. w proccw didowd. or rep. resent%Ihd IIS us wuukl not mfrm$e priwtcly mvnd rqdtts. Itcl”crmcti herein 10 my sp.xi!l tom. mrcial ptotlucr. prtxcm. or S.rvskc hy tdc mmw. Irdcnmrl.. nmu(a.lurm. or dwrwi~.. does nut mmwsuily mnstitutc or reply its mdursmwnt. rccummcnddton. or favorin: by the llniwd States (“mvcmment ormy qxncy thctcd. rhc V!C$VSmd opinmm d .mthor% qmxd herein do nut net’. UMrily r;~lt or died lhow. ol”the llnttcd SIJIL.S( ;ovwnnwnt or my ugcncy lhure of. UNITED STATES .. DEPARTMENT OF ENERGY CONTRACT W-7405 -ENG. 36 . ... LA-8902-MS UC-32 Issued: July 1981 G- . VAX/VMS Benchmarking Larry Creel —. I . .._- -- ----- ,. .- .-. .: .- ,.. .. ., ..,..: , .. .., . ... ..... - .-, ..:. .. *._–: - . VAX/VMS BENCHMARKING by Larry Creel ABSTRACT Primary emphasis in this report is on the perform- ance of three Digital Equipment Corporation VAX-11/780 computers at the Los Alamos National Laboratory. Programs used in the study are part of the Laboratory’s set of benchmark programs. -

Latest Results from the Procedure Calling Test, Ackermann's Function
Latest results from the procedure calling test, Ackermann’s function B A WICHMANN National Physical Laboratory, Teddington, Middlesex Division of Information Technology and Computing March 1982 Abstract Ackermann’s function has been used to measure the procedure calling over- head in languages which support recursion. Two papers have been written on this which are reproduced1 in this report. Results from further measurements are in- cluded in this report together with comments on the data obtained and codings of the test in Ada and Basic. 1 INTRODUCTION In spite of the two publications on the use of Ackermann’s Function [1, 2] as a mea- sure of the procedure-calling efficiency of programming languages, there is still some interest in the topic. It is an easy test to perform and the large number of results ob- tained means that an implementation can be compared with many other systems. The purpose of this report is to provide a listing of all the results obtained to date and to show their relationship. Few modern languages do not provide recursion and hence the test is appropriate for measuring the overheads of procedure calls in most cases. Ackermann’s function is a small recursive function listed on page 2 of [1] in Al- gol 60. Although of no particular interest in itself, the function does perform other operations common to much systems programming (testing for zero, incrementing and decrementing integers). The function has two parameters M and N, the test being for (3, N) with N in the range 1 to 6. Like all tests, the interpretation of the results is not without difficulty. -
Final Report and Recommendation on New
CERN LIBRARIES, GENEVA CERN/FC/661 Original: English 5 December, 1963 CM-P00085196 ORGANISATION EUROPĒENNE POUR LA RECHERCHE NUCLĒAIRE CERN EUROPEAN ORGANIZATION FOR NUCLEAR RESEARCH FINANCE COMMITTEE Fifty-sixth Meeting Geneva - 16 December, 1963 FINAL REPORT AND RECOMMENDATION ON NEW COMPUTERS FOR CERN This paper contains the results of the enquiries and studies unfinished at the time of the meeting of the Finance Committee, on 13 November, together with the Director-General's conclusions and request to the Finance Committee to authorize CERN to purchase a CDC 6600 computer for delivery early in 1965. 7752/e CERN/FC/661 FINAL REPORT AND RECOMMENDATION ON NEW COMPUTERS FOR CERN 1. Introduction The Finance Committee, at its meeting, on 13 November, discussed an interim report on CERN's computing needs (CERN/FC/653), which accompanied the Report of the European Committee on the Future Computing Needs of CERN, CERN/516 (hereinafter referred to as "the Report"). Since then, the final offers from manufacturers have been received and evaluated, and the outstanding technical studies referred to in the conclusion of the Interim Report (section 5) have been carried out. This paper contains: - a short report on the results of these technical studies, - the evaluation of the final offers, technically and financially, - a proposal for financing the purchase of the new computer, - the implications on the CERN budget and programme of a new computer, - the conclusion, with a request that the Finance Committee authorize CERN to purchase a CDC 6600 computer and to raise a loan for the necessary amount, - an annex containing prices and other material from the offers. -

FEBRUARY 1981 R
THE ISSN 004-8917 AUSTRALIAN COMPUTER JOURNAL VOLUME 13, NUMBER 1, FEBRUARY 1981 r CONTENTS INVITED PAPER 1-6 Software and Hardware Technology for the ICL Distributed Array Processor R.W. GOSTICK ADVANCED TUTORIALS 7-12 On Understanding Binary Search B.P. KIDMAN 13-23 Some Trends in System Design Methodologies I.T. HAWRYSZKIEWYCZ SHORT COMMUNICATIONS 24-25 NEBALL and FINGRP: New Programs for Multiple Nearest- Neighbour Analysis D.J. ABEL and W.T. WILLIAMS 26 Program INVER Revisited D.J. ABEL and W.T. WILLIAMS 27-28 A Comparison between PASCAL, FORTRAN and PL/1 D.J. KEWLEY SPECIAL FEATURES 29 Book Reviews 30-31 Letters to the Editor 32 Call for Papers V J Published for Australian Computer Society Incorporated Registered for Posting as a Publication — Category B “This wouldn't have happened, Fenwick, with a Tandem NonStop™ System," When your computers down, are you out or business? You can bank on it. Timing couldn’t be worse. No question about it. Your busiest season. Customers pounding for service. When you’re on a Tandem NonStop™ System, your information All it takes is one small failure somewhere in the system. One files and your processes are protected from contamination in a disc or disc controller. One input/output channel. way no other system can match. We’ve built in safeguards other For want of an alternative, the system is down and business is suppliers can only dream about. You’ve heard the war stories about lost. Sometimes forever. restart and restore data base on other systems. They’re not exaggerations, but they can be a thing of the past. -

Lecture 14 Data Level Parallelism (2) EEC 171 Parallel Architectures John Owens UC Davis Credits • © John Owens / UC Davis 2007–9
Lecture 14 Data Level Parallelism (2) EEC 171 Parallel Architectures John Owens UC Davis Credits • © John Owens / UC Davis 2007–9. • Thanks to many sources for slide material: Computer Organization and Design (Patterson & Hennessy) © 2005, Computer Architecture (Hennessy & Patterson) © 2007, Inside the Machine (Jon Stokes) © 2007, © Dan Connors / University of Colorado 2007, © Kathy Yelick / UCB 2007, © Wen-Mei Hwu/David Kirk, University of Illinois 2007, © David Patterson / UCB 2003–7, © John Lazzaro / UCB 2006, © Mary Jane Irwin / Penn State 2005, © John Kubiatowicz / UCB 2002, © Krste Asinovic/Arvind / MIT 2002, © Morgan Kaufmann Publishers 1998. Outline • Vector machines (Cray 1) • Vector complexities • Massively parallel machines (Thinking Machines CM-2) • Parallel algorithms Vector Processing • Appendix F & slides by Krste Asanovic, MIT Supercomputers • Definition of a supercomputer: • Fastest machine in world at given task • A device to turn a compute-bound problem into an I/O bound problem • Any machine costing $30M+ • Any machine designed by Seymour Cray • CDC 6600 (Cray, 1964) regarded as first supercomputer Seymour Cray • “Anyone can build a fast CPU. The trick is to build a fast system.” • When asked what kind of CAD tools he used for the Cray-1, Cray said that he liked “#3 pencils with quadrille pads”. Cray recommended using the backs of the pages so that the lines were not so dominant. • When he was told that Apple Computer had just bought a Cray to help design the next Apple Macintosh, Cray commented that he had just bought -

Online Sec 6.15.Indd
6.155.9 Historical Perspective and Further Reading Th ere is a tremendous amount of history in multiprocessors; in this section we divide our discussion by both time period and architecture. We start with the SIMD approach and the Illiac IV. We then turn to a short discussion of some other early experimental multiprocessors and progress to a discussion of some of the great debates in parallel processing. Next we discuss the historical roots of the present multiprocessors and conclude by discussing recent advances. SIMD Computers: Attractive Idea, Many Attempts, No Lasting Successes Th e cost of a general multiprocessor is, however, very high and further design options were considered which would decrease the cost without seriously degrading the power or effi ciency of the system. Th e options consist of recentralizing one of the three major components. Centralizing the [control unit] gives rise to the basic organization of [an] . array processor such as the Illiac IV. Bouknight et al. [1972] Th e SIMD model was one of the earliest models of parallel computing, dating back to the fi rst large-scale multiprocessor, the Illiac IV. Th e key idea in that multiprocessor, as in more recent SIMD multiprocessors, is to have a single instruction that operates on many data items at once, using many functional units (see Figure 6.15.1). Although successful in pushing several technologies that proved useful in later projects, it failed as a computer. Costs escalated from the $8 million estimate in 1966 to $31 million by 1972, despite construction of only a quarter of the planned multiprocessor. -

Seymour Cray: the Father of World Supercomputer
History Research 2019; 7(1): 1-6 http://www.sciencepublishinggroup.com/j/history doi: 10.11648/j.history.20190701.11 ISSN: 2376-6700 (Print); ISSN: 2376-6719 (Online) Seymour Cray: The Father of World Supercomputer Si Hongwei Department of the History of Science, Tsinghua University, Beijing, China Email address: To cite this article: Si Hongwei. Seymour Cray: The Father of World Supercomputer. History Research. Vol. 7, No. 1, 2019, pp. 1-6. doi: 10.11648/j.history.20190701.11 Received : May 14, 2019; Accepted : June 13, 2019; Published : June 26, 2019 Abstract: Seymour R. Cray was an American engineer and supercomputer developer who designed a series of the fastest computers in the world in 1960-1980s. The difference between Cray and most other corporate engineers is that he often won those business battles. His success was attributable to his existence in a postwar culture where engineers were valued. He was able to also part of an extraordinary industry where revolutionary developments were encouraged, and even necessary. Lastly Cray is recognized as "the father of world supercomputer". From the perspective of science and technology history, this paper describes the history of Cray and his development of supercomputer. It also sums up his innovative ideas and scientific spirit. It provides a reference for supercomputer enthusiasts and peers in the history of computer research. Keywords: Seymour R. Cray, Supercomputer, Science and Technology History 1. Introduction 2. The Genius Seymour Supercomputer refers to the most advanced electronic computer system with the most advanced technology, the Seymour Cray was born on September 28th, 1925 in the fastest computing speed, the largest storage capacity and the town of Chippewa, Wisconsin. -
Conversion of the COBRA-IV-I Code from CDC CYBER to HP 9000/700 Version
KAERI/TR-803/97 Conversion of the COBRA-IV-I Code from CDC CYBER to HP 9000/700 Version CDC CYBER Version COBRA-IV-I ^H HP 9000/700 Version ° 1997. 1 Korea Atomic Energy Research Institute £- JiJL>Hl- "CDC CYBER Version COBRA-IV-I 3.B.4) HP 9000/700 Version ±£-2\ ^^" o\] 1997 tf 71 «V Abstract COBRA-IV-I is a multichannel analysis code for the thermal-hydraulic analysis of rod bundle nuclear fuel elements and cores based on the subchannel approach. The existing COBRA-IV-I code is the Control Data Corporation (CDC) CYBER version, which has limitations on the computer core storage and gives some inconvenience to the user interface. To solve these problems, we have converted the COBRA-IV-I code from the CDC CYBER mainframe to an Hewlett Packard (HP) 9000/700-series workstation version, and have verified the converted code. As a result, we have found almost no difference between the two versions in their calculation results. Therefore we expect the HP 9000/700 version of the COBRA-IV-I code to be the basis for the future development of an improved multichannel analysis code under the more convenient user environment. COBRA-IV-I fe COBRA-IV-I £• CDC CYBER-§- SE CDC CYBER oflSlH COBRA-IV-I SHf HP 9000/700 HP 9000/700 -§--^- COBRA-IV-I 3-E.t: ^± Table of Contents Abstract 2 Abstract (in Korean) 3 Table of Contents 4 List of Tables 6 List of Figures 7 1. Introduction 8 2. Conversion of COBRA-IV-1 9 2.1 Precision 9 2.2 Convenience 12 2.3 Emulation 12 2.4 Syntax 13 2.5 Equivalence 17 3. -

SIMD1 Ñ Illiac IV
Illiac IV History Illiac IV n First massively parallel computer ● SIMD (duplicate the PE, not the CU) ● First large system with semiconductor- based primary memory n Three earlier designs (vacuum tubes and transistors) culminating in the Illiac IV design, all at the University of Illinois ● Logical organization similar to the Solomon (prototyped by Westinghouse) ● Sponsored by DARPA, built by various companies, assembled by Burroughs ● Plan was for 256 PEs, in 4 quadrants of 64 PEs, but only one quadrant was built ● Used at NASA Ames Research Center in mid-1970s 1 Fall 2001, Lecture SIMD1 2 Fall 2001, Lecture SIMD1 Illiac IV Architectural Overview Programming Issues n One CU (control unit), n Consider the following FORTRAN code: 64 64-bit PEs (processing elements), DO 10 I = 1, 64 each PE has a PEM (PE memory) 10 A(I) = B(I) + C(I) ● Put A(1), B(1), C(1) on PU 1, etc. n CU operates on scalars, PEs on vector- n Each PE loads RGA from base+1, aligned arrays adds base+2, stores into base, ● All PEs execute the instruction broadcast where “base” is base of data in PEM by the CU, if they are in active mode n Each PE does this simultaneously, giving a speedup of 64 ● Each PE can perform various arithmetic ● and logical instructions For less than 64 array elements, some processors will sit idle ● Each PE has a memory with 2048 64-bit ● words, accessed in less than 188 ns For more than 64 array elements, some processors might have to do more work ● PEs can operate on data in 64-bit, 32-bit, and 8-bit formats n For some algorithms, it may be desirable to turn off PEs n Data routed between PEs various ways ● 64 PEs compute, then one half passes data to other half, then 32 PEs compute, n I/O is handled by a separate Burroughs etc.