Rotation Moment of Inertia and Applications Atwood Machine with Massive Pulley Energy of Rotation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lecture Notes on Classical Mechanics for Physics 106Ab Sunil Golwala
Lecture Notes on Classical Mechanics for Physics 106ab Sunil Golwala Revision Date: September 25, 2006 Introduction These notes were written during the Fall, 2004, and Winter, 2005, terms. They are indeed lecture notes – I literally lecture from these notes. They combine material from Hand and Finch (mostly), Thornton, and Goldstein, but cover the material in a different order than any one of these texts and deviate from them widely in some places and less so in others. The reader will no doubt ask the question I asked myself many times while writing these notes: why bother? There are a large number of mechanics textbooks available all covering this very standard material, complete with worked examples and end-of-chapter problems. I can only defend myself by saying that all teachers understand their material in a slightly different way and it is very difficult to teach from someone else’s point of view – it’s like walking in shoes that are two sizes wrong. It is inevitable that every teacher will want to present some of the material in a way that differs from the available texts. These notes simply put my particular presentation down on the page for your reference. These notes are not a substitute for a proper textbook; I have not provided nearly as many examples or illustrations, and have provided no exercises. They are a supplement. I suggest you skim them in parallel while reading one of the recommended texts for the course, focusing your attention on places where these notes deviate from the texts. ii Contents 1 Elementary Mechanics 1 1.1 Newtonian Mechanics .................................. -

The Case of Atwood's Machine
Advances in Historical Studies 2014. Vol.3, No.1, 68-81 Published Online February 2014 in SciRes (http://www.scirp.org/journal/ahs) http://dx.doi.org/10.4236/ahs.2014.31007 Spreading Newtonian Philosophy with Instruments: The Case of Atwood’s Machine Salvatore Esposito1, Edvige Schettino2 1I.N.F.N., Naples Unit, Naples, Italy 2Department of Physics, University of Naples “Federico II”, Naples, Italy Email: [email protected], [email protected] Received June 13th, 2013; revised July 20th, 2013; accepted July 29th, 2013 Copyright © 2014 Salvatore Esposito, Edvige Schettino. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In accordance of the Creative Commons Attribution Li- cense all Copyrights © 2014 are reserved for SCIRP and the owner of the intellectual property Salvatore Esposito, Edvige Schettino. All Copyright © 2014 are guarded by law and by SCIRP as a guardian. We study how the paradigm of Newton’s science, based on the organization of scientific knowledge as a series of mathematical laws, was definitively accepted in science courses—in the last decades of the XVIII century, in England as well as in the Continent—by means of the “universal” dynamical machine invented by George Atwood in late 1770s just for this purpose. The spreading of such machine, occurring well before the appearance of Atwood’s treatise where he described the novel machine and the experi- ments to be performed with it, is a quite interesting historical case, which we consider in some detail. -
The Lagrangian Method Copyright 2007 by David Morin, [email protected] (Draft Version)
Chapter 6 The Lagrangian Method Copyright 2007 by David Morin, [email protected] (draft version) In this chapter, we're going to learn about a whole new way of looking at things. Consider the system of a mass on the end of a spring. We can analyze this, of course, by using F = ma to write down mxÄ = ¡kx. The solutions to this equation are sinusoidal functions, as we well know. We can, however, ¯gure things out by using another method which doesn't explicitly use F = ma. In many (in fact, probably most) physical situations, this new method is far superior to using F = ma. You will soon discover this for yourself when you tackle the problems and exercises for this chapter. We will present our new method by ¯rst stating its rules (without any justi¯cation) and showing that they somehow end up magically giving the correct answer. We will then give the method proper justi¯cation. 6.1 The Euler-Lagrange equations Here is the procedure. Consider the following seemingly silly combination of the kinetic and potential energies (T and V , respectively), L ´ T ¡ V: (6.1) This is called the Lagrangian. Yes, there is a minus sign in the de¯nition (a plus sign would simply give the total energy). In the problem of a mass on the end of a spring, T = mx_ 2=2 and V = kx2=2, so we have 1 1 L = mx_ 2 ¡ kx2: (6.2) 2 2 Now write µ ¶ d @L @L = : (6.3) dt @x_ @x Don't worry, we'll show you in Section 6.2 where this comes from. -
8.012 Physics I: Classical Mechanics Fall 2008
MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Physics Physics 8.012 Fall 2008 Exam 3 NAME: _________________S___OL___U____TIO___NS___ ________________ Instructions: 1. Do all FIVE (5) problems. You have 90 minutes. 2. SHOW ALL WORK. Be sure to circle your final answer. 3. Read the questions carefully. 4. All work must be done in this booklet in workspace provided. Extra blank pages are provided at the end if needed. 5. NO books, notes, calculators or computers are permitted. A sheet of useful equations is provided on the last page. Your Scores Problem Maximum Score Grader 1 10 2 20 3 25 4 25 5 20 Total 100 8.012 Fall 2007 Quiz 3 Problem 1: Quick Multiple Choice Questions [10 pts] For each of the following questions circle the correct answer. You do not need to show any work. (a) [2 pts] A bicycle rider pedals up a hill with constant velocity v. In which direction does friction act on the wheels? Friction does not act while the Uphill Downhill bike moves at constant velocity Friction provides the only support against falling downhill, so it must point up. (b) [2 pts] A gyroscope is set to spin so that its ! spin vector points back to the mount. The gryoscope is initially set at an angle α below horizontal and released from rest. Gravity acts downward. In which direction does the precession angular velocity vector point once the gyroscope starts to precess? Up Down Into the page Out of the page The initial fall of the gyroscope causes the spin vector to point up. -

Classical Mechanics an Introductory Course
Classical Mechanics An introductory course Richard Fitzpatrick Associate Professor of Physics The University of Texas at Austin Contents 1 Introduction 7 1.1 Major sources: . 7 1.2 What is classical mechanics? . 7 1.3 mks units . 9 1.4 Standard prefixes . 10 1.5 Other units . 11 1.6 Precision and significant figures . 12 1.7 Dimensional analysis . 12 2 Motion in 1 dimension 18 2.1 Introduction . 18 2.2 Displacement . 18 2.3 Velocity . 19 2.4 Acceleration . 21 2.5 Motion with constant velocity . 23 2.6 Motion with constant acceleration . 24 2.7 Free-fall under gravity . 26 3 Motion in 3 dimensions 32 3.1 Introduction . 32 3.2 Cartesian coordinates . 32 3.3 Vector displacement . 33 3.4 Vector addition . 34 3.5 Vector magnitude . 35 2 3.6 Scalar multiplication . 35 3.7 Diagonals of a parallelogram . 36 3.8 Vector velocity and vector acceleration . 37 3.9 Motion with constant velocity . 39 3.10 Motion with constant acceleration . 39 3.11 Projectile motion . 41 3.12 Relative velocity . 44 4 Newton's laws of motion 53 4.1 Introduction . 53 4.2 Newton's first law of motion . 53 4.3 Newton's second law of motion . 54 4.4 Hooke's law . 55 4.5 Newton's third law of motion . 56 4.6 Mass and weight . 57 4.7 Strings, pulleys, and inclines . 60 4.8 Friction . 67 4.9 Frames of reference . 70 5 Conservation of energy 78 5.1 Introduction . 78 5.2 Energy conservation during free-fall . -
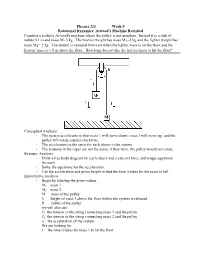
Physics 211 Week 9 Rotational Dynamics: Atwood's Machine Revisited Consider a Realistic Atwood's Machine Where the Pulley Is Not Massless
Physics 211 Week 9 Rotational Dynamics: Atwood's Machine Revisited Consider a realistic Atwood's machine where the pulley is not massless. Instead it is a disk of radius 0.1 m and mass M=3 kg. The heavier weight has mass M1=5 kg and the lighter weight has mass M2= 2 kg. The system is released from rest when the lighter mass is on the floor and the heavier mass is 1.8 m above the floor. How long does it take the heavier mass to hit the floor? Conceptual Analysis: - The system accelerates so that mass 1 will move down, mass 2 will move up, and the pulley will rotate counter clockwise. - The acceleration is the same for each object in the system. - The tensions in the ropes are not the same, if they were, the pulley would not rotate. Strategic Analysis: - Draw a free body diagram for each object and create net force and torque equations for each. - Solve the equations for the acceleration. - Use the acceleration and given height to find the time it takes for the mass to fall. Quantitative Analysis: - Begin by labeling the given values: M1 mass 1 M2 mass 2 M mass of the pulley h height of mass 1 above the floor before the system is released R radius of the pulley we will also use T1 the tension in the string connecting mass 1 and the pulley T2 the tension in the string connecting mass 2 and the pulley a the acceleration of the system We are looking for t the time it takes for mass 1 to hit the floor - We'll begin by drawing a free body diagram for each mass. -

Phys 325 Discussion 11 – Welcome to Lagrangian Mechanics
Phys 325 Discussion 11 – Welcome to Lagrangian Mechanics Procedure for Lagrangian Mechanics: In last week’s lectures, we presented the elements of the Lagrangian approach to mechanics and worked some examples. This week we will prove that the approach is valid, but the proof will be much more meaningful to you if you have worked with the procedure first. Below, we will go through each step of the Lagrangian procedure for solving a mechanics problem using a simple example. This week’s homework also presents these steps, so if you’ve started the homework already, you don’t need to read the paragraphs describing each step. Problem 1: Step-by-Step Hints & Checkpoints 1 The Example Problem: A bead of mass m is threaded on a circular wire ring of radius R. The ring is placed in the xy-plane, centered on the origin, and not allowed to move. Uniform gravity g points in the –y direction, and there is no friction between the bead and the wire ring. Our goal is to determine the motion of the bead. ⚫ Step 1: Figure out the number of degrees of freedom (DOF) of the system. We will call it n. It is the number of coordinates of the system that can be varied independently. To illustrate, a system composed of N point-like particles would have 3N degrees of freedom, since each particle can move in three independent spatial directions. However, if the particles are subject to constraint forces (normal forces, tensions, the binding forces that keep the ≈1023 atoms of a rigid object in a fixed shape, etc), restrictions are imposed on how the particles can move. -

Chapter 7 Lagrangian and Hamiltonian Mechanics
Chapter 7 Lagrangian and Hamiltonian Mechanics Abstract Chapter 7 is devoted to problems solved by Lagrangian and Hamiltonian mechanics. 7.1 Basic Concepts and Formulae Newtonian mechanics deals with force which is a vector quantity and therefore dif- ficult to handle. On the other hand, Lagrangian mechanics deals with kinetic and potential energies which are scalar quantities while Hamilton’s equations involve generalized momenta, both are easy to handle. While Lagrangian mechanics con- tainsn differential equations corresponding ton generalized coordinates, Hamil- tonian mechanics contains 2n equation, that is, double the number. However, the equations for Hamiltonian mechanics are linear. The symbolq is a generalized coordinate used to represent an arbitrary coordi- natex,θ,ϕ, etc. IfT is the kinetic energy,V the potential energy then the LagrangianL is given by L T V (7.1) = − Lagrangian Equation: d dL ∂L 0(K 1,2...) (7.2) dt d q − ∂q = = ˙ K K ∂v where it is assumed thatV is not a function of the velocities, i.e. 0. Eqn (2) ∂ qK = is applicable to all the conservative systems. ˙ Whenn independent coordinates are required to specify the positions of the masses of a system, the system is ofn degrees of freedom. r HamiltonH s 1 ps qs L (7.3) = = ˙ − wherep s is the generalized momentum and qK is the generalized velocity. ˙ 287 288 7 Lagrangian and Hamiltonian Mechanics Hamiltonian’s Canonical Equations ∂H ∂H qr , pr (7.4) ∂pr =˙ ∂qr =−˙ 7.2 Problems 7.1 Consider a particle of massm moving in a plane under the attractive force μm/r 2 directed to the origin of polar coordinatesr,θ.