CENTROID What Is Centroid?
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Centroids by Composite Areas.Pptx
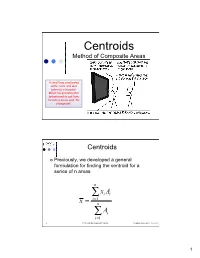
Centroids Method of Composite Areas A small boy swallowed some coins and was taken to a hospital. When his grandmother telephoned to ask how he was a nurse said 'No change yet'. Centroids ¢ Previously, we developed a general formulation for finding the centroid for a series of n areas n xA ∑ ii i=1 x = n A ∑ i i=1 2 Centroids by Composite Areas Monday, November 12, 2012 1 Centroids ¢ xi was the distance from the y-axis to the local centroid of the area Ai n xA ∑ ii i=1 x = n A ∑ i i=1 3 Centroids by Composite Areas Monday, November 12, 2012 Centroids ¢ If we can break up a shape into a series of smaller shapes that have predefined local centroid locations, we can use this formula to locate the centroid of the composite shape n xA ∑ ii i=1 x = n A ∑ i 4 Centroids by Composite Areas i=1 Monday, November 12, 2012 2 Centroid by Composite Bodies ¢ There is a table in the back cover of your book that gives you the location of local centroids for a select group of shapes ¢ The point labeled C is the location of the centroid of that shape. 5 Centroids by Composite Areas Monday, November 12, 2012 Centroid by Composite Bodies ¢ Please note that these are local centroids, they are given in reference to the x and y axes as shown in the table. 6 Centroids by Composite Areas Monday, November 12, 2012 3 Centroid by Composite Bodies ¢ For example, the centroid location of the semicircular area has the y-axis through the center of the area and the x-axis at the bottom of the area ¢ The x-centroid would be located at 0 and the y-centroid would be located -

Archimedes and the Arbelos1 Bobby Hanson October 17, 2007
Archimedes and the Arbelos1 Bobby Hanson October 17, 2007 The mathematician’s patterns, like the painter’s or the poet’s must be beautiful; the ideas like the colours or the words, must fit together in a harmonious way. Beauty is the first test: there is no permanent place in the world for ugly mathematics. — G.H. Hardy, A Mathematician’s Apology ACBr 1 − r Figure 1. The Arbelos Problem 1. We will warm up on an easy problem: Show that traveling from A to B along the big semicircle is the same distance as traveling from A to B by way of C along the two smaller semicircles. Proof. The arc from A to C has length πr/2. The arc from C to B has length π(1 − r)/2. The arc from A to B has length π/2. ˜ 1My notes are shamelessly stolen from notes by Tom Rike, of the Berkeley Math Circle available at http://mathcircle.berkeley.edu/BMC6/ps0506/ArbelosBMC.pdf . 1 2 If we draw the line tangent to the two smaller semicircles, it must be perpendicular to AB. (Why?) We will let D be the point where this line intersects the largest of the semicircles; X and Y will indicate the points of intersection with the line segments AD and BD with the two smaller semicircles respectively (see Figure 2). Finally, let P be the point where XY and CD intersect. D X P Y ACBr 1 − r Figure 2 Problem 2. Now show that XY and CD are the same length, and that they bisect each other. -
Simple Machines Work 5.1 What Is Work?
5 Table of Contents 5 Unit 1: Energy and Motion Chapter 5: Work and Machines 5.1: Work 5.2: Using Machines 5.3: Simple Machines Work 5.1 What is work? • To many people, the word work means something they do to earn money. • The word work also means exerting a force with your muscles. Work 5.1 What is work? • Someone might say they have done work when they push as hard as they can against a wall that doesn't move. • However, in science the word work is used in a different way. Work 5.1 Work Makes Something Move • Remember that a force is a push or a pull. In order for work to be done, a force must make something move. • Work is the transfer of energy that occurs when a force makes an object move. • If you push against the desk and nothing moves, then you haven't done any work. Work 5.1 Doing work • There are two conditions that have to be satisfied for work to be done on an object. • One is that the applied force must make the object move, and the other is that the movement must be in the same direction as the applied force. Work 5.1 Doing work • For example, when you lift a stack of books, your arms apply a force upward and the books move upward. Because the force and distance are in the same direction, your arms have done work on the books. Work 5.1 Force and Direction of Motion • When you carry books while walking, you might think that your arms are doing work. -

Lesson 20: Composite Area Problems
NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 20 7•3 Lesson 20: Composite Area Problems Student Outcomes . Students find the area of regions in the coordinate plane with polygonal boundaries by decomposing the plane into triangles and quadrilaterals, including regions with polygonal holes. Students find composite areas of regions in the coordinate plane by decomposing the plane into familiar figures (triangles, quadrilaterals, circles, semicircles, and quarter circles). Lesson Notes In Lessons 17 through 20, students learned to find the areas of various regions, including quadrilaterals, triangles, circles, semicircles, and those plotted on coordinate planes. In this lesson, students use prior knowledge to use the sum and/or difference of the areas to find unknown composite areas. Classwork Example 1 (5 minutes) Scaffolding: For struggling students, display Example 1 posters around the room displaying the visuals and the Find the composite area of the shaded region. Use ퟑ. ퟏퟒ for 흅. formulas of the area of a circle, a triangle, and a quadrilateral for reference. Allow students to look at the problem and find the area independently before solving as a class. What information can we take from the image? Two circles are on the coordinate plane. The diameter of the larger circle is 6 units, and the diameter of MP.1 the smaller circle is 4 units. How do we know what the diameters of the circles are? We can count the units along the diameter of the circles, or we can subtract the coordinate points to find the length of the diameter. Lesson 20: Composite Area Problems 283 This work is derived from Eureka Math ™ and licensed by Great Minds. -

Chapter 6 the Arbelos
Chapter 6 The arbelos 6.1 Archimedes’ theorems on the arbelos Theorem 6.1 (Archimedes 1). The two circles touching CP on different sides and AC CB each touching two of the semicircles have equal diameters AB· . P W1 W2 A O1 O C O2 B A O1 O C O2 B Theorem 6.2 (Archimedes 2). The diameter of the circle tangent to all three semi- circles is AC CB AB · · . AC2 + AC CB + CB2 · We shall consider Theorem ?? in ?? later, and for now examine Archimedes’ wonderful proofs of the more remarkable§ Theorems 6.1 and 6.2. By synthetic reasoning, he computed the radii of these circles. 1Book of Lemmas, Proposition 5. 2Book of Lemmas, Proposition 6. 602 The arbelos 6.1.1 Archimedes’ proof of the twin circles theorem In the beginning of the Book of Lemmas, Archimedes has established a basic proposition 3 on parallel diameters of two tangent circles. If two circles are tangent to each other (internally or externally) at a point P , and if AB, XY are two parallel diameters of the circles, then the lines AX and BY intersect at P . D F I W1 E H W2 G A O C B Figure 6.1: Consider the circle tangent to CP at E, and to the semicircle on AC at G, to that on AB at F . If EH is the diameter through E, then AH and BE intersect at F . Also, AE and CH intersect at G. Let I be the intersection of AE with the outer semicircle. Extend AF and BI to intersect at D. -

Energy, Work, and Simple Machines and Finally, Multiply Both Sides of the Equation by 1/2 M
A Not-So- Simple Machine How does a multispeed bicycle let a cyclist ride over any kind of terrain with the least effort? ➥ Look at the text on page 238 for the answer. CHAPTER Energy, Work, and Simple 10 Machines hat is energy? Energy is needed to make cars run, to heat WHAT YOU’LL LEARN or cool our homes, and to make computers hum. Solar • You will recognize that work W energy is required for crops and forests to grow. The energy and power describe how stored in food gives you the energy needed to play sports or walk energy moves through the to the store. Note, however, all these statements indicate that hav- environment. ing energy enables something to perform an action, rather than • You will relate force to work saying directly what energy is. It is hard to give a good definition and explain how machines of energy without examples of how energy is used and the result- make work easier by chang- ing changes. ing forces. In this chapter, you’ll concentrate on one method of changing the energy of a system—work. You’ll need to be careful here. You WHY IT’S IMPORTANT may think you’re doing work when you put forth a physical effort. • A little mental effort in iden- For example, you and a friend may try to move a stalled car, but tifying the right machine for the car doesn’t budge. You feel as though you’ve done work a task can save you much because you’re out of breath and your arms ache. -
SIC MECHANICAL ENGINEERING For
MALLA REDDY COLLEGE OF ENGINEERING & TECHNOLOGY (Autonomous Institution – UGC, Govt. of India) Recognized under 2(f) and 12 (B) of UGC ACT 1956 (Affiliated to JNTUH, Hyderabad, Approved by AICTE - Accredited by NBA & NAAC – ‘A’ Grade - ISO 9001:2015 Certified) Maisammaguda, Dhulapally (Post Via. Kompally), Secunderabad – 500100, Telangana State, India DEPARTMENT OF MECHANICAL ENGINEERING DIGITAL NOTES OF BASIC MECHANICAL ENGINEERING For B.Tech – II YEAR – I Prepared by Ms. K. NAVYASRI CONTENTS UNIT Name of the unit PAGE.NO. NO. I Stresses and strains 4-26 II Engineering Materials and Joining Processes 27-37 III Properties of Fluid 38-46 Hydraulic pumps and turbines IV Internal combustion engines 47-59 V Belts - Ropes and chain 60-81 Gear trains Basic Mechanical Engineering II BTech-I SEM BASIC MECHANICAL ENGINEERING Objectives: To give an insight to students about the behavior of materials under external forces. The concept of stress, strain, elasticity etc. as applied to various structures under loading are included. The student able to learn about concept of fluids, turbines and engines. UNIT – I Stresses and strains: kinds of – stress-strains, elasticity and plasticity, Hooks law, stress – strain diagrams, modules of elasticity, Poisson’s ratio, linear and volumetric strain, relation between E, N, and K, bars of uniform strength, compound bars and temperature stresses. UNIT – II Engineering Materials and Joining Processes: Engineering Materials: Types and applications of nonferrous metals and alloys Composites: Introduction, Definition, Classification and applications (Air Craft and Automobiles) Soldering, Brazing and Welding: Definitions, Classification and method of soldering, Brazing an welding. Difference between Soldering, Brazing and Welding. -
The Pythagorean Theorem Crown Jewel of Mathematics
The Pythagorean Theorem Crown Jewel of Mathematics 5 3 4 John C. Sparks The Pythagorean Theorem Crown Jewel of Mathematics By John C. Sparks The Pythagorean Theorem Crown Jewel of Mathematics Copyright © 2008 John C. Sparks All rights reserved. No part of this book may be reproduced in any form—except for the inclusion of brief quotations in a review—without permission in writing from the author or publisher. Front cover, Pythagorean Dreams, a composite mosaic of historical Pythagorean proofs. Back cover photo by Curtis Sparks ISBN: XXXXXXXXX First Published by Author House XXXXX Library of Congress Control Number XXXXXXXX Published by AuthorHouse 1663 Liberty Drive, Suite 200 Bloomington, Indiana 47403 (800)839-8640 www.authorhouse.com Produced by Sparrow-Hawke †reasures Xenia, Ohio 45385 Printed in the United States of America 2 Dedication I would like to dedicate The Pythagorean Theorem to: Carolyn Sparks, my wife, best friend, and life partner for 40 years; our two grown sons, Robert and Curtis; My father, Roscoe C. Sparks (1910-1994). From Earth with Love Do you remember, as do I, When Neil walked, as so did we, On a calm and sun-lit sea One July, Tranquillity, Filled with dreams and futures? For in that month of long ago, Lofty visions raptured all Moonstruck with that starry call From life beyond this earthen ball... Not wedded to its surface. But marriage is of dust to dust Where seasoned limbs reclaim the ground Though passing thoughts still fly around Supernal realms never found On the planet of our birth. And I, a man, love you true, Love as God had made it so, Not angel rust when then aglow, But coupled here, now rib to soul, Dear Carolyn of mine. -

UNIT2.6-Mechanisms: Eng Notes
EP@BHS-TOPIC 2: Energy, UNIT2.6: Mechanisms Page 1 UNIT 2.6 MECHANISMS: Concepts Addressed in Lesson: 1. Most mechanisms are composed of simple machines, interlocking gears, chain driven sprockets, and belt driven pulleys. 2. Mechanisms are used to transmit energy through a system by manipulating force, speed, and direction. 3. Mechanical advantages mathematically represent the ratio of the force output to the force input for mechanisms. Performance Objectives Addressed in Lesson: It is expected that students will: o Measure forces, speeds, and distances as related to the operation of mechanisms. o Distinguish between the six simple machines, their attributes, and components. o Calculate ideal mechanical advantages, gear ratios, and drive ratios for mechanisms. o Design, create, and test gear, belt-pulley, and/or chain-sprocket systems. o Calculate work, power, torque, and efficiency for mechanical systems. Assessment: Explanation • Students will explain the difference between engineering and engineering technology. • Students will explain the relationship between work and power in a mechanical system. • Students will explain the processes of calculating mechanical advantage. Interpretation • Students will make journal entries reflecting on their learning experiences. • Students will explain the importance and relevance of simple machines in everyday life. Application • Students will apply their knowledge of simple machines and calculate mechanical advantage of objects within the lab environment. • Students will apply their knowledge of system efficiency to calculate efficiency of a mechanical system. • Students will apply their knowledge of gear, sprocket, and pulley systems to calculate speed, distance, rotational direction, and mechanical advantage. Perspective • Students will select an engineering or engineering technology field of interest and prepare an interview with a professional within the field of interest. -

Extensionalism: the Revolution in Logic
Nimrod Bar-Am Extensionalism: The Revolution in Logic Bar-Am_Fm.indd iii 1/22/2008 10:19:09 PM N. Bar-Am Head, Rhetoric and Philosophy of Communication Unit Communication Department Sapir College of the Negev M.P. Hof Ashkelon 79165 Israel ISBN: 978-1-4020-8167-5 e-ISBN: 978-1-4020-8168-2 DOI: 10.1007/ 978-1-4020-8168-2 Library of Congress Control Number: 2007941591 All Rights Reserved © 2008 Springer Science + Business Media, B.V. No part of this work may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, microfilming, recording or otherwise, without written permission from the Publisher, with the exception of any material supplied specifically for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Printed on acid-free paper. 9 8 7 6 5 4 3 2 1 springer.com Bar-Am_Fm.indd iv 1/22/2008 10:19:09 PM Motto: “… logic … since Aristotle … has been unable to advance a step, and, thus, to all appearances has reached its completion” Immanuel Kant, The Critique of Pure Reason Preface to the 2nd ed., 1787 “Pure mathematics was discovered by Boole … the fact being that Boole was too modest to suppose his book the first ever written on mathematics.… His book was in fact concerned with formal logic, and this is the same thing as mathematics” Bertrand Russell Recent Work in the Philosophy of Mathematics, 1901 Bar-Am_Fm.indd vii 1/22/2008 10:19:09 PM Abstract For a very long time, Aristotelian logic was accepted as a tool (Organon) for the generation of scientific theory. -
Centroids Introduction • the Earth Exerts a Gravitational Force on Each of the Particles Forming a Body
Centroids Introduction • The earth exerts a gravitational force on each of the particles forming a body. These forces can be replace by a single equivalent force equal to the weight of the body and applied at the center of gravity for the body. • The centroid of an area is analogous to the center of gravity of a body. The concept of the first moment of an area is used to locate the centroid. 5 - 2 Centroids • Centroid of mass – (a.k.a. Center of mass) – (a.k.a. Center of weight) – (a.k.a. Center of gravity) • For a solid, the point where the distributed mass is centered • Centroid of volume, Centroid of area xM xm x dm yM ym y dm Center of Gravity of a 2D Body • Center of gravity of a plate • Center of gravity of a wire M y xW xW x dW M y yW yW y dW 5 - 7 Centroids &First Moments of Areas & Lines • Centroid of an area • Centroid of a line xW x dW xgM g x dM xW x dW M V tA) dM dV tdA x La x adL xAt x tdA xL x dL xA x dA Q y yL y dL first moment with respect to y yA y dA Q x first moment with respect to x 5 - 8 First Moments of Areas and Lines • An area is symmetric with respect to an axis BB’ if for every point P there exists a point P’ such that PP’ is perpendicular to BB’ and is divided into two equal parts by BB’. -
Mechanical Systems
UNIT Mechanical Systems How many mechanical systems have you used today? You may not realize it, but you use mechanical systems all the time to do simple tasks. When you ride a bicycle, open a can, or sharpen a pencil, you have used a mechanical system to help you complete a task. All mechanical systems have an energy source. The energy could come from electricity, gasoline, or solar energy, but often the energy comes from humans. (Remember that huge structures such as the pyramids were built solely using human power!) The energy needed to move this bicycle and this plane, for example, comes from a pedalling human. Can you see how machines help us perform tasks we might find difficult to do otherwise? Imagine opening a can without a can opener. Could you fly without a plane or other type of aircraft? In this unit, you will learn how some small, human-powered mechanical devices work. You will see that tools as simple as a pair of scissors function on the same principles as massive equipment powered by fluid pressure and heat engines. You will discover the main factors in the efficient operation of mechanical systems. You will also design and build your own mechanical devices — including some powered by hydraulics and pneumatics — and investigate their efficiency. Finally, this unit examines how machines have changed as science and technology have changed. 266 Unit Contents TOPIC 1 Levers and Inclined Planes 270 TOPIC 2 The Wheel and Axle,Gears, and Pulleys 285 TOPIC 3 Energy, Friction, and Efficiency 296 TOPIC 4 Force, Pressure, and Area 304 TOPIC 5 Hydraulics and Pneumatics 313 TOPIC 6 Combining Systems 326 TOPIC 7 Machines Throughout History 332 TOPIC 8 People and Machines 342 UNIT 4 • How do we use How many machines have you used today? machines to do work and How do we use mechanical devices such as to transfer energy? levers and pulleys to help us perform tasks? In Topics 1–3, you will learn about lots of How can we design and • mechanical devices.