LEARNING to EVOLVE 1 Learning to Evolve
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Metaheuristics1
METAHEURISTICS1 Kenneth Sörensen University of Antwerp, Belgium Fred Glover University of Colorado and OptTek Systems, Inc., USA 1 Definition A metaheuristic is a high-level problem-independent algorithmic framework that provides a set of guidelines or strategies to develop heuristic optimization algorithms (Sörensen and Glover, To appear). Notable examples of metaheuristics include genetic/evolutionary algorithms, tabu search, simulated annealing, and ant colony optimization, although many more exist. A problem-specific implementation of a heuristic optimization algorithm according to the guidelines expressed in a metaheuristic framework is also referred to as a metaheuristic. The term was coined by Glover (1986) and combines the Greek prefix meta- (metá, beyond in the sense of high-level) with heuristic (from the Greek heuriskein or euriskein, to search). Metaheuristic algorithms, i.e., optimization methods designed according to the strategies laid out in a metaheuristic framework, are — as the name suggests — always heuristic in nature. This fact distinguishes them from exact methods, that do come with a proof that the optimal solution will be found in a finite (although often prohibitively large) amount of time. Metaheuristics are therefore developed specifically to find a solution that is “good enough” in a computing time that is “small enough”. As a result, they are not subject to combinatorial explosion – the phenomenon where the computing time required to find the optimal solution of NP- hard problems increases as an exponential function of the problem size. Metaheuristics have been demonstrated by the scientific community to be a viable, and often superior, alternative to more traditional (exact) methods of mixed- integer optimization such as branch and bound and dynamic programming. -

Genetic Programming: Theory, Implementation, and the Evolution of Unconstrained Solutions
Genetic Programming: Theory, Implementation, and the Evolution of Unconstrained Solutions Alan Robinson Division III Thesis Committee: Lee Spector Hampshire College Jaime Davila May 2001 Mark Feinstein Contents Part I: Background 1 INTRODUCTION................................................................................................7 1.1 BACKGROUND – AUTOMATIC PROGRAMMING...................................................7 1.2 THIS PROJECT..................................................................................................8 1.3 SUMMARY OF CHAPTERS .................................................................................8 2 GENETIC PROGRAMMING REVIEW..........................................................11 2.1 WHAT IS GENETIC PROGRAMMING: A BRIEF OVERVIEW ...................................11 2.2 CONTEMPORARY GENETIC PROGRAMMING: IN DEPTH .....................................13 2.3 PREREQUISITE: A LANGUAGE AMENABLE TO (SEMI) RANDOM MODIFICATION ..13 2.4 STEPS SPECIFIC TO EACH PROBLEM.................................................................14 2.4.1 Create fitness function ..........................................................................14 2.4.2 Choose run parameters.........................................................................16 2.4.3 Select function / terminals.....................................................................17 2.5 THE GENETIC PROGRAMMING ALGORITHM IN ACTION .....................................18 2.5.1 Generate random population ................................................................18 -

Covariance Matrix Adaptation for the Rapid Illumination of Behavior Space
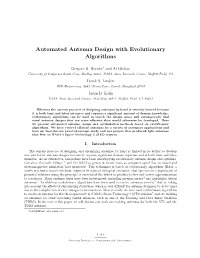
Covariance Matrix Adaptation for the Rapid Illumination of Behavior Space Matthew C. Fontaine Julian Togelius Viterbi School of Engineering Tandon School of Engineering University of Southern California New York University Los Angeles, CA New York City, NY [email protected] [email protected] Stefanos Nikolaidis Amy K. Hoover Viterbi School of Engineering Ying Wu College of Computing University of Southern California New Jersey Institute of Technology Los Angeles, CA Newark, NJ [email protected] [email protected] ABSTRACT We focus on the challenge of finding a diverse collection of quality solutions on complex continuous domains. While quality diver- sity (QD) algorithms like Novelty Search with Local Competition (NSLC) and MAP-Elites are designed to generate a diverse range of solutions, these algorithms require a large number of evaluations for exploration of continuous spaces. Meanwhile, variants of the Covariance Matrix Adaptation Evolution Strategy (CMA-ES) are among the best-performing derivative-free optimizers in single- objective continuous domains. This paper proposes a new QD algo- rithm called Covariance Matrix Adaptation MAP-Elites (CMA-ME). Figure 1: Comparing Hearthstone Archives. Sample archives Our new algorithm combines the self-adaptation techniques of for both MAP-Elites and CMA-ME from the Hearthstone ex- CMA-ES with archiving and mapping techniques for maintaining periment. Our new method, CMA-ME, both fills more cells diversity in QD. Results from experiments based on standard con- in behavior space and finds higher quality policies to play tinuous optimization benchmarks show that CMA-ME finds better- Hearthstone than MAP-Elites. Each grid cell is an elite (high quality solutions than MAP-Elites; similarly, results on the strategic performing policy) and the intensity value represent the game Hearthstone show that CMA-ME finds both a higher overall win rate across 200 games against difficult opponents. -

Completely Derandomized Self-Adaptation in Evolution Strategies
Completely Derandomized Self-Adaptation in Evolution Strategies Nikolaus Hansen [email protected] Technische Universitat¨ Berlin, Fachgebiet fur¨ Bionik, Sekr. ACK 1, Ackerstr. 71–76, 13355 Berlin, Germany Andreas Ostermeier [email protected] Technische Universitat¨ Berlin, Fachgebiet fur¨ Bionik, Sekr. ACK 1, Ackerstr. 71–76, 13355 Berlin, Germany Abstract This paper puts forward two useful methods for self-adaptation of the mutation dis- tribution – the concepts of derandomization and cumulation. Principle shortcomings of the concept of mutative strategy parameter control and two levels of derandomization are reviewed. Basic demands on the self-adaptation of arbitrary (normal) mutation dis- tributions are developed. Applying arbitrary, normal mutation distributions is equiv- alent to applying a general, linear problem encoding. The underlying objective of mutative strategy parameter control is roughly to favor previously selected mutation steps in the future. If this objective is pursued rigor- ously, a completely derandomized self-adaptation scheme results, which adapts arbi- trary normal mutation distributions. This scheme, called covariance matrix adaptation (CMA), meets the previously stated demands. It can still be considerably improved by cumulation – utilizing an evolution path rather than single search steps. Simulations on various test functions reveal local and global search properties of the evolution strategy with and without covariance matrix adaptation. Their per- formances are comparable only on perfectly scaled functions. On badly scaled, non- separable functions usually a speed up factor of several orders of magnitude is ob- served. On moderately mis-scaled functions a speed up factor of three to ten can be expected. Keywords Evolution strategy, self-adaptation, strategy parameter control, step size control, de- randomization, derandomized self-adaptation, covariance matrix adaptation, evolu- tion path, cumulation, cumulative path length control. -

A Hybrid LSTM-Based Genetic Programming Approach for Short-Term Prediction of Global Solar Radiation Using Weather Data
processes Article A Hybrid LSTM-Based Genetic Programming Approach for Short-Term Prediction of Global Solar Radiation Using Weather Data Rami Al-Hajj 1,* , Ali Assi 2 , Mohamad Fouad 3 and Emad Mabrouk 1 1 College of Engineering and Technology, American University of the Middle East, Egaila 54200, Kuwait; [email protected] 2 Independent Researcher, Senior IEEE Member, Montreal, QC H1X1M4, Canada; [email protected] 3 Department of Computer Engineering, University of Mansoura, Mansoura 35516, Egypt; [email protected] * Correspondence: [email protected] or [email protected] Abstract: The integration of solar energy in smart grids and other utilities is continuously increasing due to its economic and environmental benefits. However, the uncertainty of available solar energy creates challenges regarding the stability of the generated power the supply-demand balance’s consistency. An accurate global solar radiation (GSR) prediction model can ensure overall system reliability and power generation scheduling. This article describes a nonlinear hybrid model based on Long Short-Term Memory (LSTM) models and the Genetic Programming technique for short-term prediction of global solar radiation. The LSTMs are Recurrent Neural Network (RNN) models that are successfully used to predict time-series data. We use these models as base predictors of GSR using weather and solar radiation (SR) data. Genetic programming (GP) is an evolutionary heuristic computing technique that enables automatic search for complex solution formulas. We use the GP Citation: Al-Hajj, R.; Assi, A.; Fouad, in a post-processing stage to combine the LSTM models’ outputs to find the best prediction of the M.; Mabrouk, E. -

Long Term Memory Assistance for Evolutionary Algorithms
mathematics Article Long Term Memory Assistance for Evolutionary Algorithms Matej Crepinšekˇ 1,* , Shih-Hsi Liu 2 , Marjan Mernik 1 and Miha Ravber 1 1 Faculty of Electrical Engineering and Computer Science, University of Maribor, 2000 Maribor, Slovenia; [email protected] (M.M.); [email protected] (M.R.) 2 Department of Computer Science, California State University Fresno, Fresno, CA 93740, USA; [email protected] * Correspondence: [email protected] Received: 7 September 2019; Accepted: 12 November 2019; Published: 18 November 2019 Abstract: Short term memory that records the current population has been an inherent component of Evolutionary Algorithms (EAs). As hardware technologies advance currently, inexpensive memory with massive capacities could become a performance boost to EAs. This paper introduces a Long Term Memory Assistance (LTMA) that records the entire search history of an evolutionary process. With LTMA, individuals already visited (i.e., duplicate solutions) do not need to be re-evaluated, and thus, resources originally designated to fitness evaluations could be reallocated to continue search space exploration or exploitation. Three sets of experiments were conducted to prove the superiority of LTMA. In the first experiment, it was shown that LTMA recorded at least 50% more duplicate individuals than a short term memory. In the second experiment, ABC and jDElscop were applied to the CEC-2015 benchmark functions. By avoiding fitness re-evaluation, LTMA improved execution time of the most time consuming problems F03 and F05 between 7% and 28% and 7% and 16%, respectively. In the third experiment, a hard real-world problem for determining soil models’ parameters, LTMA improved execution time between 26% and 69%. -

Improving Fitness Functions in Genetic Programming for Classification on Unbalanced Credit Card Datasets
Improving Fitness Functions in Genetic Programming for Classification on Unbalanced Credit Card Datasets Van Loi Cao, Nhien An Le Khac, Miguel Nicolau, Michael O’Neill, James McDermott University College Dublin Abstract. Credit card fraud detection based on machine learning has recently attracted considerable interest from the research community. One of the most important tasks in this area is the ability of classifiers to handle the imbalance in credit card data. In this scenario, classifiers tend to yield poor accuracy on the fraud class (minority class) despite realizing high overall accuracy. This is due to the influence of the major- ity class on traditional training criteria. In this paper, we aim to apply genetic programming to address this issue by adapting existing fitness functions. We examine two fitness functions from previous studies and develop two new fitness functions to evolve GP classifier with superior accuracy on the minority class and overall. Two UCI credit card datasets are used to evaluate the effectiveness of the proposed fitness functions. The results demonstrate that the proposed fitness functions augment GP classifiers, encouraging fitter solutions on both the minority and the majority classes. 1 Introduction Credit cards have emerged as the preferred means of payment in response to continuous economic growth and rapid developments in information technology. The daily volume of credit card transactions reveals the shift from cash to card. Concurrently, the incidence of credit card fraud has risen with the loss of billions of dollars globally each year. Moreover, criminals have evolved increasingly more sophisticated strategies to exploit weaknesses in the security protocols. -

A New Biogeography-Based Optimization Approach Based on Shannon-Wiener Diversity Index to Pid Tuning in Multivariable System
ABCM Symposium Series in Mechatronics - Vol. 5 Section III – Emerging Technologies and AI Applications Copyright © 2012 by ABCM Page 592 A NEW BIOGEOGRAPHY-BASED OPTIMIZATION APPROACH BASED ON SHANNON-WIENER DIVERSITY INDEX TO PID TUNING IN MULTIVARIABLE SYSTEM Marsil de Athayde Costa e Silva, [email protected] Undergraduate course of Mechatronics Engineering Camila da Costa Silveira, [email protected] Leandro dos Santos Coelho, [email protected] Industrial and Systems Engineering Graduate Program, PPGEPS Pontifical Catholic University of Parana, PUCPR Imaculada Conceição, 1155, Zip code 80215-901, Curitiba, Parana, Brazil Abstract. Proportional-integral-derivative (PID) control is the most popular control architecture used in industrial problems. Many techniques have been proposed to tune the gains for the PID controller. Over the last few years, as an alternative to the conventional mathematical approaches, modern metaheuristics, such as evolutionary computation and swarm intelligence paradigms, have been given much attention by many researchers due to their ability to find good solutions in PID tuning. As a modern metaheuristic method, Biogeography-based optimization (BBO) is a generalization of biogeography to evolutionary algorithm inspired on the mathematical model of organism distribution in biological systems. BBO is an evolutionary process that achieves information sharing by biogeography-based migration operators. This paper proposes a modification for the BBO using a diversity index, called Shannon-wiener index (SW-BBO), for tune the gains of the PID controller in a multivariable system. Results show that the proposed SW-BBO approach is efficient to obtain high quality solutions in PID tuning. Keywords: PID control, biogeography-based optimization, Shannon-Wiener index, multivariable systems. -

A Genetic Programming-Based Low-Level Instructions Robot for Realtimebattle
entropy Article A Genetic Programming-Based Low-Level Instructions Robot for Realtimebattle Juan Romero 1,2,* , Antonino Santos 3 , Adrian Carballal 1,3 , Nereida Rodriguez-Fernandez 1,2 , Iria Santos 1,2 , Alvaro Torrente-Patiño 3 , Juan Tuñas 3 and Penousal Machado 4 1 CITIC-Research Center of Information and Communication Technologies, University of A Coruña, 15071 A Coruña, Spain; [email protected] (A.C.); [email protected] (N.R.-F.); [email protected] (I.S.) 2 Department of Computer Science and Information Technologies, Faculty of Communication Science, University of A Coruña, Campus Elviña s/n, 15071 A Coruña, Spain 3 Department of Computer Science and Information Technologies, Faculty of Computer Science, University of A Coruña, Campus Elviña s/n, 15071 A Coruña, Spain; [email protected] (A.S.); [email protected] (A.T.-P.); [email protected] (J.T.) 4 Centre for Informatics and Systems of the University of Coimbra (CISUC), DEI, University of Coimbra, 3030-790 Coimbra, Portugal; [email protected] * Correspondence: [email protected] Received: 26 November 2020; Accepted: 30 November 2020; Published: 30 November 2020 Abstract: RealTimeBattle is an environment in which robots controlled by programs fight each other. Programs control the simulated robots using low-level messages (e.g., turn radar, accelerate). Unlike other tools like Robocode, each of these robots can be developed using different programming languages. Our purpose is to generate, without human programming or other intervention, a robot that is highly competitive in RealTimeBattle. To that end, we implemented an Evolutionary Computation technique: Genetic Programming. -
Automated Antenna Design with Evolutionary Algorithms
Automated Antenna Design with Evolutionary Algorithms Gregory S. Hornby∗ and Al Globus University of California Santa Cruz, Mailtop 269-3, NASA Ames Research Center, Moffett Field, CA Derek S. Linden JEM Engineering, 8683 Cherry Lane, Laurel, Maryland 20707 Jason D. Lohn NASA Ames Research Center, Mail Stop 269-1, Moffett Field, CA 94035 Whereas the current practice of designing antennas by hand is severely limited because it is both time and labor intensive and requires a significant amount of domain knowledge, evolutionary algorithms can be used to search the design space and automatically find novel antenna designs that are more effective than would otherwise be developed. Here we present automated antenna design and optimization methods based on evolutionary algorithms. We have evolved efficient antennas for a variety of aerospace applications and here we describe one proof-of-concept study and one project that produced fight antennas that flew on NASA's Space Technology 5 (ST5) mission. I. Introduction The current practice of designing and optimizing antennas by hand is limited in its ability to develop new and better antenna designs because it requires significant domain expertise and is both time and labor intensive. As an alternative, researchers have been investigating evolutionary antenna design and optimiza- tion since the early 1990s,1{3 and the field has grown in recent years as computer speed has increased and electromagnetics simulators have improved. This techniques is based on evolutionary algorithms (EAs), a family stochastic search methods, inspired by natural biological evolution, that operate on a population of potential solutions using the principle of survival of the fittest to produce better and better approximations to a solution. -

Evolutionary Algorithms
Evolutionary Algorithms Dr. Sascha Lange AG Maschinelles Lernen und Naturlichsprachliche¨ Systeme Albert-Ludwigs-Universit¨at Freiburg [email protected] Dr. Sascha Lange Machine Learning Lab, University of Freiburg Evolutionary Algorithms (1) Acknowlegements and Further Reading These slides are mainly based on the following three sources: I A. E. Eiben, J. E. Smith, Introduction to Evolutionary Computing, corrected reprint, Springer, 2007 — recommendable, easy to read but somewhat lengthy I B. Hammer, Softcomputing,LectureNotes,UniversityofOsnabruck,¨ 2003 — shorter, more research oriented overview I T. Mitchell, Machine Learning, McGraw Hill, 1997 — very condensed introduction with only a few selected topics Further sources include several research papers (a few important and / or interesting are explicitly cited in the slides) and own experiences with the methods described in these slides. Dr. Sascha Lange Machine Learning Lab, University of Freiburg Evolutionary Algorithms (2) ‘Evolutionary Algorithms’ (EA) constitute a collection of methods that originally have been developed to solve combinatorial optimization problems. They adapt Darwinian principles to automated problem solving. Nowadays, Evolutionary Algorithms is a subset of Evolutionary Computation that itself is a subfield of Artificial Intelligence / Computational Intelligence. Evolutionary Algorithms are those metaheuristic optimization algorithms from Evolutionary Computation that are population-based and are inspired by natural evolution.Typicalingredientsare: I A population (set) of individuals (the candidate solutions) I Aproblem-specificfitness (objective function to be optimized) I Mechanisms for selection, recombination and mutation (search strategy) There is an ongoing controversy whether or not EA can be considered a machine learning technique. They have been deemed as ‘uninformed search’ and failing in the sense of learning from experience (‘never make an error twice’). -

Genetic Algorithms for Applied Path Planning a Thesis Presented in Partial Ful Llment of the Honors Program Vincent R
Genetic Algorithms for Applied Path Planning A Thesis Presented in Partial Ful llment of the Honors Program Vincent R. Ragusa Abstract Path planning is the computational task of choosing a path through an environment. As a task humans do hundreds of times a day, it may seem that path planning is an easy task, and perhaps naturally suited for a computer to solve. This is not the case however. There are many ways in which NP-Hard problems like path planning can be made easier for computers to solve, but the most signi cant of these is the use of approximation algorithms. One such approximation algorithm is called a genetic algorithm. Genetic algorithms belong to a an area of computer science called evolutionary computation. The techniques used in evolutionary computation algorithms are modeled after the principles of Darwinian evolution by natural selection. Solutions to the problem are literally bred for their problem solving ability through many generations of selective breeding. The goal of the research presented is to examine the viability of genetic algorithms as a practical solution to the path planning problem. Various modi cations to a well known genetic algorithm (NSGA-II) were implemented and tested experimentally to determine if the modi cation had an e ect on the operational eciency of the algorithm. Two new forms of crossover were implemented with positive results. The notion of mass extinction driving evolution was tested with inconclusive results. A path correction algorithm called make valid was created which has proven to be extremely powerful. Finally several additional objective functions were tested including a path smoothness measure and an obstacle intrusion measure, the latter showing an enormous positive result.