PHYS 536 RC Circuits Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Time Constant of an Rc Circuit
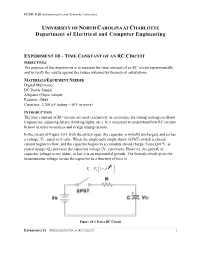
ECGR 2155 Instrumentation and Networks Laboratory UNIVERSITY OF NORTH CAROLINA AT CHARLOTTE Department of Electrical and Computer Engineering EXPERIMENT 10 – TIME CONSTANT OF AN RC CIRCUIT OBJECTIVES The purpose of this experiment is to measure the time constant of an RC circuit experimentally and to verify the results against the values obtained by theoretical calculations. MATERIALS/EQUIPMENT NEEDED Digital Multimeter DC Power Supply Alligator (Clips) Jumper Resistor: 20kΩ Capacitor: 2,200 µF (rating = 50V or more) INTRODUCTION The time constant of RC circuits are used extensively in electronics for timing (setting oscillator frequencies, adjusting delays, blinking lights, etc.). It is necessary to understand how RC circuits behave in order to analyze and design timing circuits. In the circuit of Figure 10-1 with the switch open, the capacitor is initially uncharged, and so has a voltage, Vc, equal to 0 volts. When the single-pole single-throw (SPST) switch is closed, current begins to flow, and the capacitor begins to accumulate stored charge. Since Q=CV, as stored charge (Q) increases the capacitor voltage (Vc) increases. However, the growth of capacitor voltage is not linear; in fact it is an exponential growth. The formula which gives the instantaneous voltage across the capacitor as a function of time is (−t ) VV=1 − eτ cS Figure 10-1 Series RC Circuit EXPERIMENT 10 – TIME CONSTANT OF AN RC CIRCUIT 1 ECGR 2155 Instrumentation and Networks Laboratory This formula describes exponential growth, in which the capacitor is initially 0 volts, and grows to a value of near Vs after a finite amount of time. -

Lab 5 AC Concepts and Measurements II: Capacitors and RC Time-Constant
Sonoma State University Department of Engineering Science Fall 2017 EE110 Laboratory Introduction to Engineering & Laboratory Experience Lab 5 AC Concepts and Measurements II: Capacitors and RC Time-Constant Capacitors Capacitors are devices that can store electric charge similar to a battery (but with major differences). In its simplest form we can think of a capacitor to consist of two metallic plates separated by air or some other insulating material. The capacitance of a capacitor is referred to by C (in units of Farad, F) and indicates the ratio of electric charge Q accumulated on its plates to the voltage V across it (C = Q/V). The unit of electric charge is Coulomb. Therefore: 1 F = 1 Coulomb/1 Volt). Farad is a huge unit and the capacitance of capacitors is usually described in small fractions of a Farad. The capacitance itself is strictly a function of the geometry of the device and the type of insulating material that fills the gap between its plates. For a parallel plate capacitor, with the plate area of A and plate separation of d, C = (ε A)/d, where ε is the permittivity of the material in the gap. The formula is more complicated for cylindrical and other geometries. However, it is clear that the capacitance is large when the area of the plates are large and they are closely spaced. In order to create a large capacitance, we can increase the surface area of the plates by rolling them into cylindrical layers as shown in the diagram above. Note that if the space between plates is filled with air, then C = (ε0 A)/d, where ε0 is the permittivity of free space. -

(ECE, NDSU) Lab 11 – Experiment Multi-Stage RC Low Pass Filters
ECE-311 (ECE, NDSU) Lab 11 – Experiment Multi-stage RC low pass filters 1. Objective In this lab you will use the single-stage RC circuit filter to build a 3-stage RC low pass filter. The objective of this lab is to show that: As more stages are added, the filter becomes able to better reject high frequency noise When plotted on a Bode plot, the gain approaches two asymptotes: the low frequency gain approaches a constant gain of 0dB while the high-frequency gain drops as 20N dB/decade where N is the number of stages. 2. Background The single stage RC filter is a low pass filter: low frequencies are passed (have a gain of one), while high frequencies are rejected (the gain goes to zero). This is a useful filter to remove noise from a signal. Many types of signals are predominantly low-frequency in nature - meaning they change slowly. This includes measurements of temperature, pressure, volume, position, speed, etc. Noise, however, tends to be at all frequencies, and is seen as the “fuzzy” line on you oscilloscope when you amplify the signal. The trick when designing a low-pass filter is to select the RC time constant so that the gain is one over the frequency range of your signal (so it is passed unchanged) but zero outside this range (to reject the noise). 3. Theoretical response One problem with adding stages to an RC filter is that each new stage loads the previous stage. This loading consumes or “bleeds” some current from the previous stage capacitor, changing the behavior of the previous stage circuit. -

Time Constant Calculations This Worksheet and All Related Files Are
Time constant calculations This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/, or send a letter to Creative Commons, 559 Nathan Abbott Way, Stanford, California 94305, USA. The terms and conditions of this license allow for free copying, distribution, and/or modification of all licensed works by the general public. Resources and methods for learning about these subjects (list a few here, in preparation for your research): 1 Questions Question 1 Qualitatively determine the voltages across all components as well as the current through all components in this simple RC circuit at three different times: (1) just before the switch closes, (2) at the instant the switch contacts touch, and (3) after the switch has been closed for a long time. Assume that the capacitor begins in a completely discharged state: Before the At the instant of Long after the switch switch closes: switch closure: has closed: C C C R R R Express your answers qualitatively: ”maximum,” ”minimum,” or perhaps ”zero” if you know that to be the case. Before the switch closes: VC = VR = Vswitch = I = At the instant of switch closure: VC = VR = Vswitch = I = Long after the switch has closed: VC = VR = Vswitch = I = Hint: a graph may be a helpful tool for determining the answers! file 01811 2 Question 2 Qualitatively determine the voltages across all components as well as the current through all components in this simple LR circuit at three different times: (1) just before the switch closes, (2) at the instant the switch contacts touch, and (3) after the switch has been closed for a long time. -

Cutoff Frequency, Lightning, RC Time Constant, Schumann Resonance, Spherical Capacitance
International Journal of Theoretical and Mathematical Physics 2019, 9(5): 121-130 DOI: 10.5923/j.ijtmp.20190905.01 Solar System Electrostatic Motor Theory Greg Poole Industrial Tests, Inc., Rocklin, CA, United States Abstract In this paper, the solar system has been visualized as an electrostatic motor for the research of scientific concepts. The Earth and space have all been represented as spherical capacitors to derive time constants from simple RC theory. Using known wave impedance values (R) from antenna theory and celestial capacitance (C) several time constants are derived which collectively represent time itself. Equations from Electro Relativity are verified using known values and constants to confirm wave impedance values are applicable to the earth antenna. Dark energy can be represented as a tremendous capacitor voltage and dark matter as characteristic transmission line impedance. Cosmic energy transfer may be limited to the known wave impedance of 377 Ω. Harvesting of energy wirelessly at the Earth’s surface or from the Sun in space may be feasible by matching the power supply source impedance to a load impedance. Separating the various the three fields allows us to see how high-altitude lightning is produced and the earth maintains its atmospheric voltage. Spacetime, is space and time, defined by the radial size and discharge time of a spherical or toroid capacitor. Keywords Cutoff Frequency, Lightning, RC Time Constant, Schumann Resonance, Spherical Capacitance the nearest thimble, and so put the wheel in motion; that 1. Introduction thimble, in passing by, receives a spark, and thereby being electrified is repelled and so driven forwards; while a second In 1749, Benjamin Franklin first invented the electrical being attracted, approaches the wire, receives a spark, and jack or electrostatic wheel. -
The RC Circuit
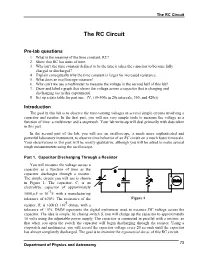
The RC Circuit The RC Circuit Pre-lab questions 1. What is the meaning of the time constant, RC? 2. Show that RC has units of time. 3. Why isn’t the time constant defined to be the time it takes the capacitor to become fully charged or discharged? 4. Explain conceptually why the time constant is larger for increased resistance. 5. What does an oscilloscope measure? 6. Why can’t we use a multimeter to measure the voltage in the second half of this lab? 7. Draw and label a graph that shows the voltage across a capacitor that is charging and discharging (as in this experiment). 8. Set up a data table for part one. (V, t (0-300s in 20s intervals, 360, and 420s)) Introduction The goal in this lab is to observe the time-varying voltages in several simple circuits involving a capacitor and resistor. In the first part, you will use very simple tools to measure the voltage as a function of time: a multimeter and a stopwatch. Your lab write-up will deal primarily with data taken in this part. In the second part of the lab, you will use an oscilloscope, a much more sophisticated and powerful laboratory instrument, to observe time behavior of an RC circuit on a much faster timescale. Your observations in this part will be mostly qualitative, although you will be asked to make several rough measurements using the oscilloscope. Part 1. Capacitor Discharging Through a Resistor You will measure the voltage across a capacitor as a function of time as the capacitor discharges through a resistor. -
Voltage Divider Capacitor RC Circuits
Physics 120/220 Voltage Divider Capacitor RC circuits Prof. Anyes Taffard Voltage Divider 2 The figure is called a voltage divider. It’s one of the most useful and important circuit elements we will encounter. It is used to generate a particular voltage for a large fixed Vin. Vin Current (R1 & R2) I = R1 + R2 Output voltage: R 2 Voltage drop is Vout = IR2 = Vin ∴Vout ≤ Vin R1 + R2 proportional to the resistances Vout can be used to drive a circuit that needs a voltage lower than Vin. Voltage Divider (cont.) 3 Add load resistor RL in parallel to R2. You can model R2 and RL as one resistor (parallel combination), then calculate Vout for this new voltage divider R2 If RL >> R2, then the output voltage is still: VL = Vin R1 + R2 However, if RL is comparable to R2, VL is reduced. We say that the circuit is “loaded”. Ideal voltage and current sources 4 Voltage source: provides fixed Vout regardless of current/load resistance. Has zero internal resistance (perfect battery). Real voltage source supplies only finite max I. Current source: provides fixed Iout regardless of voltage/load resistance. Has infinite resistance. Real current source have limit on voltage they can provide. Voltage source • More common • In almost every circuit • Battery or Power Supply (PS) Thevenin’s theorem 5 Thevenin’s theorem states that any two terminals network of R & V sources has an equivalent circuit consisting of a single voltage source VTH and a single resistor RTH. To find the Thevenin’s equivalent VTH & RTH: V V • For an “open circuit” (RLà∞), then Th = open circuit • Voltage drops across device when disconnected from circuit – no external load attached. -

A Circuit-Level 3D DRAM Area, Timing, And
ABSTRACT PARK, JONG BEOM. 3D-DATE: A Circuit-Level Three-Dimensional DRAM Area, Timing, and Energy Model. (Under the direction of W. Rhett Davis and Paul D. Franzon.) Three-dimensional stacked DRAM technology has emerged recently. Many studies have shown that 3D DRAM is most promising solutions for future memory architecture to fulfill high bandwidth and high-speed operation with low energy consumption. It is necessary to explore 3D DRAM design space and find the optimum DRAM architecture in different system needs. However, a few studies have offered models for power and access latency calculations of DRAM designs in limited ranges. This has led to a growing gap in knowledge of the area, timing, and energy modeling of 3D DRAMs for utilization in the design process of processor architectures that could benefit from 3D DRAMs. This paper presents a circuit level DRAM Area, Timing, and Energy model (DATE) which supports 3D DRAM design with TSV. DATE provides front-end and back-end DRAM process roadmap from 90 nm to 16 nm node and provides a broader range 3D DRAM design model along with emerging transistor device. DATE is successfully validated against several commodity planar and 3D DRAMs and published prototype DRAMs with emerging device. Energy verification has a mean error of about -5% to 1%, with a standard deviation of up to 9.8%. Speed verification has a mean error of about -13% to -27% and a standard deviation of up to 24%. In the case of the area, the bank has a mean error of -3% and the whole die has a mean error of -1%. -

Transient Circuits, RC, RL Step Responses, 2Nd Order Circuits
Alpha Laboratories ECSE-2010 Fall 2018 LABORATORY 3: Transient circuits, RC, RL step responses, 2nd Order Circuits Note: If your partner is no longer in the class, please talk to the instructor. Material covered: RC circuits Integrators Differentiators 1st order RC, RL Circuits 2nd order RLC series, parallel circuits Thevenin circuits Part A: Transient Circuits RC Time constants: A time constant is the time it takes a circuit characteristic (Voltage for example) to change from one state to another state. In a simple RC circuit where the resistor and capacitor are in series, the RC time constant is defined as the time it takes the voltage across a capacitor to reach 63.2% of its final value when charging (or 36.8% of its initial value when discharging). It is assume a step function (Heavyside function) is applied as the source. The time constant is defined by the equation τ = RC where τ is the time constant in seconds R is the resistance in Ohms C is the capacitance in Farads The following figure illustrates the time constant for a square pulse when the capacitor is charging and discharging during the appropriate parts of the input signal. You will see a similar plot in the lab. Note the charge (63.2%) and discharge voltages (36.8%) after one time constant, respectively. Written by J. Braunstein Revised by S. Sawyer Fall 2018: 8/23/2018 Rensselaer Polytechnic Institute Troy, New York, USA 1 Alpha Laboratories ECSE-2010 Fall 2018 Written by J. Braunstein Revised by S. Sawyer Fall 2018: 8/23/2018 Rensselaer Polytechnic Institute Troy, New York, USA 2 Alpha Laboratories ECSE-2010 Fall 2018 Discovery Board: For most of the remaining class, you will want to compare input and output voltage time varying signals. -

Microsoft Powerpoint
RAM (Random Access Memory) Speaker: Lung -Sheng Chien Reference: [1] Bruce Jacob, Spencer W. Ng, David T. Wang, MEMORY SYSTEMS Cache, DRAM, Disk [2] Hideo Sunami, The invention and development of the first trench- capacitor DRAM cell, http://www.cmoset.com/uploads/4.1-08.pdf [3] JEDEC STANDARD: DDR2 SDRAM SPECIFICATION [4] John P. Uyemura, Introduction to VLSI circuits and systems [5] Benson, university physics OutLine • Preliminary - parallel-plate capacitor - RC circuit - MOSFET • DRAM cell • DRAM device • DRAM access protocol • DRAM timing parameter • DDR SDRAM SRAM Typical PC organization. Cache: use SRAM main memory : use DRAM Basic organization of DRAM internals DRAM versus SRAM Dynamic RAM Static RAM • Random access: each location in Cost Low High memory has a unique address. The Speed Slow Fast time to access a given location is # of transistors 1 6 independent of the sequence of Density High Low prior accesses and is constant. target Main memory Cache DRAM cell ( 1T1C cell ) Question 1 : what is capacitor? SRAM cell Question 2 : what is transistor? Electric flux electric flux = number of field lines passing though a surface 1 uniform electric field, electrical flux is defined by ΦE =E ⋅ A 2 if the surface is not flat or field is not uniform, then one must sum contributions of all tiny elements of area Φ≈E EAEA1 ⋅∆+ 1 2 ⋅∆+ 2 =∑ EAj ⋅∆→ j ∫ EdA ⋅ Gauss’s Law flux leaving surface = flux entering surface net flux is 0, say Φ=E ∫ E ⋅ dA = 0 Gauss’s Law : net flux through a closed surface is proportional to net charge enclosed -

Calculating the Time Constant of an RC Circuit
Undergraduate Journal of Mathematical Modeling: One + Two Volume 2 | 2010 Spring Article 3 2010 Calculating the Time Constant of an RC Circuit Sean Dunford University of South Florida Advisors: Arcadii Grinshpan, Mathematics and Statistics Gerald Woods, Physics Problem Suggested By: Gerald Woods Follow this and additional works at: https://scholarcommons.usf.edu/ujmm Part of the Mathematics Commons UJMM is an open access journal, free to authors and readers, and relies on your support: Donate Now Recommended Citation Dunford, Sean (2010) "Calculating the Time Constant of an RC Circuit," Undergraduate Journal of Mathematical Modeling: One + Two: Vol. 2: Iss. 2, Article 3. DOI: http://dx.doi.org/10.5038/2326-3652.2.2.3 Available at: https://scholarcommons.usf.edu/ujmm/vol2/iss2/3 Calculating the Time Constant of an RC Circuit Abstract In this experiment, a capacitor was charged to its full capacitance then discharged through a resistor. By timing how long it took the capacitor to fully discharge through the resistor, we can determine the RC time constant using calculus. Keywords Time Constant, RC circuit, Electronics Creative Commons License This work is licensed under a Creative Commons Attribution-Noncommercial-Share Alike 4.0 License. This article is available in Undergraduate Journal of Mathematical Modeling: One + Two: https://scholarcommons.usf.edu/ujmm/vol2/iss2/3 Dunford: Calculating the Time Constant of an RC Circuit 2 SEAN DUNFORD TABLE OF CONTENTS Problem Statement .................................................................................................................. -

Physics 2306 Experiment 10: Time-Dependent Circuits, Part 2
Name___________________ ID number_________________________ Date____________________ Lab partner_________________________ Lab CRN________________ Lab instructor_______________________ Physics 2306 Experiment 10: Time-dependent Circuits, part 2 Objectives • To study the frequency dependent properties of capacitors in RC circuits • To study the frequency dependent properties of inductors in RL circuits • To study the time dependent behavior of a series RLC circuit Required background reading • Young and Freedman, sections 30.1 – 30.6 Introduction In this lab, we will revisit capacitors and study more of their properties in a circuit where the driving signal varies with time. Please review the introduction section to Lab 7, Time-Dependent Circuits part 1. It will refresh your memory about the properties of RC circuits and the general behavior of exponential growth and decay curves. We will then study inductors as circuit elements and their behavior in circuits where the driving signal varies with time. Inductors are circuit elements that make use of the phenomenon known as electromagnetic induction. As you learned in last week’s lab on magnetism, the principle of electromagnetic induction is described by Faraday’s law. It states that a changing magnetic flux through a loop causes an induced emf around the loop. A typical inductor consists of a coil of many loops of wire. An example of one is the coil on the upper right hand side of your circuit board. When a time-varying current is passed through the inductor, there is time-varying magnetic field generated. This causes a changing magnetic flux between the coils and a resulting induced emf (or voltage) across the inductor. This can be stated mathematically with the relation: dI V = −L dt 1 where V is the voltage across the inductor, and I is the current passing through it.