The Evolution of Deep Space Navigation: 2006-2009*
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mars Reconnaissance Orbiter
Chapter 6 Mars Reconnaissance Orbiter Jim Taylor, Dennis K. Lee, and Shervin Shambayati 6.1 Mission Overview The Mars Reconnaissance Orbiter (MRO) [1, 2] has a suite of instruments making observations at Mars, and it provides data-relay services for Mars landers and rovers. MRO was launched on August 12, 2005. The orbiter successfully went into orbit around Mars on March 10, 2006 and began reducing its orbit altitude and circularizing the orbit in preparation for the science mission. The orbit changing was accomplished through a process called aerobraking, in preparation for the “science mission” starting in November 2006, followed by the “relay mission” starting in November 2008. MRO participated in the Mars Science Laboratory touchdown and surface mission that began in August 2012 (Chapter 7). MRO communications has operated in three different frequency bands: 1) Most telecom in both directions has been with the Deep Space Network (DSN) at X-band (~8 GHz), and this band will continue to provide operational commanding, telemetry transmission, and radiometric tracking. 2) During cruise, the functional characteristics of a separate Ka-band (~32 GHz) downlink system were verified in preparation for an operational demonstration during orbit operations. After a Ka-band hardware anomaly in cruise, the project has elected not to initiate the originally planned operational demonstration (with yet-to-be used redundant Ka-band hardware). 201 202 Chapter 6 3) A new-generation ultra-high frequency (UHF) (~400 MHz) system was verified with the Mars Exploration Rovers in preparation for the successful relay communications with the Phoenix lander in 2008 and the later Mars Science Laboratory relay operations. -

Gnc 2021 Abstract Book
GNC 2021 ABSTRACT BOOK Contents GNC Posters ................................................................................................................................................... 7 Poster 01: A Software Defined Radio Galileo and GPS SW receiver for real-time on-board Navigation for space missions ................................................................................................................................................. 7 Poster 02: JUICE Navigation camera design .................................................................................................... 9 Poster 03: PRESENTATION AND PERFORMANCES OF MULTI-CONSTELLATION GNSS ORBITAL NAVIGATION LIBRARY BOLERO ........................................................................................................................................... 10 Poster 05: EROSS Project - GNC architecture design for autonomous robotic On-Orbit Servicing .............. 12 Poster 06: Performance assessment of a multispectral sensor for relative navigation ............................... 14 Poster 07: Validation of Astrix 1090A IMU for interplanetary and landing missions ................................... 16 Poster 08: High Performance Control System Architecture with an Output Regulation Theory-based Controller and Two-Stage Optimal Observer for the Fine Pointing of Large Scientific Satellites ................. 18 Poster 09: Development of High-Precision GPSR Applicable to GEO and GTO-to-GEO Transfer ................. 20 Poster 10: P4COM: ESA Pointing Error Engineering -

Deep Impact As a World Observatory Event Held in Brussels, Belgium, 7–10 August 2006
Other Astronomical News Report on the Workshop on Deep Impact as a World Observatory Event held in Brussels, Belgium, 7–10 August 2006 Hans Ulrich Käufl1 One of the spectacular deconvolved images from the Christiaan Sterken2 Deep Impact Spacecraft High Resolution Imager shown in the conference (courtesy Mike A’Hearn and the Deep Impact Team). This is a colour composite of an infrared, a green and a violet filter forced to av- 1 ESO erage grey. Note the blueish areas on the surface 2 Vrije Universiteit Brussel, Belgium close to the crater-like structure. Those were entirely unexpected. It is highly interesting to find out if those structures can be correlated with the jets which were meticulously monitored from ground-based ob- In the context of NASA’s Deep Impact servers worldwide. This aspect in the picture – en- space mission, Comet 9P/Tempel1 tirely unrelated to the impact plume – illustrates very well how comet research, apart from the impact has been at the focus of an unprece- experiment, will profit from the synergy of spacecraft dented worldwide long-term multi- data and the unprecedented worldwide coordinated wavelength observation campaign. The observing campaign. comet has been studied through its perihelion passage by various spacecraft including the Deep Impact mission it- self, HST, Spitzer, Rosetta, XMM and all To make full use of the global data set, a To inspire new ideas, it was very helpful major ground-based observatories in workshop bringing together observers and interesting to have Roberta Olson basically all wavelength bands used in across the electromagnetic spectrum and from the New York Historical Society, astronomy, i.e. -
Comparison of the Orbital Properties of Jupiter Trojan Asteroids and Trojan Dust Xiaodong Liu and Jürgen Schmidt
A&A 614, A97 (2018) https://doi.org/10.1051/0004-6361/201832806 Astronomy & © ESO 2018 Astrophysics Comparison of the orbital properties of Jupiter Trojan asteroids and Trojan dust Xiaodong Liu and Jürgen Schmidt Astronomy Research Unit, University of Oulu, 90014 Oulu, Finland e-mail: [email protected] Received 10 February 2018 / Accepted 7 March 2018 ABSTRACT In a previous paper we simulated the orbital evolution of dust particles from the Jupiter Trojan asteroids ejected by the impacts of interplanetary particles, and evaluated their overall configuration in the form of dust arcs. Here we compare the orbital properties of these Trojan dust particles and the Trojan asteroids. Both Trojan asteroids and most of the dust particles are trapped in the Jupiter 1:1 resonance. However, for dust particles, this resonance is modified because of the presence of solar radiation pressure, which reduces the peak value of the semi-major axis distribution. We find also that some particles can be trapped in the Saturn 1:1 resonance and higher order resonances with Jupiter. The distributions of the eccentricity, the longitude of pericenter, and the inclination for Trojans and the dust are compared. For the Trojan asteroids, the peak in the longitude of pericenter distribution is about 60 degrees larger than the longitude of pericenter of Jupiter; in contrast, for Trojan dust this difference is smaller than 60 degrees, and it decreases with decreasing grain size. For the Trojan asteroids and most of the Trojan dust, the Tisserand parameter is distributed in the range of two to three. Key words. meteorites, meteors, meteoroids – planets and satellites: rings – minor planets, asteroids: general – zodiacal dust – celestial mechanics – solar wind 1. -

Dust Environment and Dynamical History of a Sample of Short-Period Comets II
A&A 571, A64 (2014) Astronomy DOI: 10.1051/0004-6361/201424331 & c ESO 2014 Astrophysics Dust environment and dynamical history of a sample of short-period comets II. 81P/Wild 2 and 103P/Hartley 2 F. J. Pozuelos1;3, F. Moreno1, F. Aceituno1, V. Casanova1, A. Sota1, J. J. López-Moreno1, J. Castellano2, E. Reina2, A. Climent2, A. Fernández2, A. San Segundo2, B. Häusler2, C. González2, D. Rodriguez2, E. Bryssinck2, E. Cortés2, F. A. Rodriguez2, F. Baldris2, F. García2, F. Gómez2, F. Limón2, F. Tifner2, G. Muler2, I. Almendros2, J. A. de los Reyes2, J. A. Henríquez2, J. A. Moreno2, J. Báez2, J. Bel2, J. Camarasa2, J. Curto2, J. F. Hernández2, J. J. González2, J. J. Martín2, J. L. Salto2, J. Lopesino2, J. M. Bosch2, J. M. Ruiz2, J. R. Vidal2, J. Ruiz2, J. Sánchez2, J. Temprano2, J. M. Aymamí2, L. Lahuerta2, L. Montoro2, M. Campas2, M. A. García2, O. Canales2, R. Benavides2, R. Dymock2, R. García2, R. Ligustri2, R. Naves2, S. Lahuerta2, and S. Pastor2 1 Instituto de Astrofísica de Andalucía (CSIC), Glorieta de la Astronomía s/n, 18008 Granada, Spain e-mail: [email protected] 2 Amateur Association Cometas-Obs, Spain 3 Universidad de Granada-Phd Program in Physics and Mathematics (FisyMat), 18071 Granada, Spain Received 3 June 2014 / Accepted 5 August 2014 ABSTRACT Aims. This paper is a continuation of the first paper in this series, where we presented an extended study of the dust environment of a sample of short-period comets and their dynamical history. On this occasion, we focus on comets 81P/Wild 2 and 103P/Hartley 2, which are of special interest as targets of the spacecraft missions Stardust and EPOXI. -

Size of Particles Ejected from an Artificial Impact Crater on Asteroid
A&A 647, A43 (2021) Astronomy https://doi.org/10.1051/0004-6361/202039777 & © K. Wada et al. 2021 Astrophysics Size of particles ejected from an artificial impact crater on asteroid 162173 Ryugu K. Wada1, K. Ishibashi1, H. Kimura1, M. Arakawa2, H. Sawada3, K. Ogawa2,4, K. Shirai2, R. Honda5, Y. Iijima3, T. Kadono6, N. Sakatani7, Y. Mimasu3, T. Toda3, Y. Shimaki3, S. Nakazawa3, H. Hayakawa3, T. Saiki3, Y. Takagi8, H. Imamura3, C. Okamoto2, M. Hayakawa3, N. Hirata9, and H. Yano3 1 Planetary Exploration Research Center, Chiba Institute of Technology, Narashino 275-0016, Japan e-mail: [email protected] 2 Department of Planetology, Kobe University, Kobe 657-8501, Japan 3 Institute of Space and Astronautical Science, Japan Aerospace Exploration Agency, Sagamihara 252-5210, Japan 4 JAXA Space Exploration Center, Japan Aerospace Exploration Agency, Sagamihara 252-5210, Japan 5 Department of Science and Technology, Kochi University, Kochi 780-8520, Japan 6 Department of Basic Sciences, University of Occupational and Environmental Health, Kitakyusyu 807-8555, Japan 7 Department of Physics, Rikkyo University, Tokyo 171-8501, Japan 8 Aichi Toho University, Nagoya 465-8515, Japan 9 School of Computer Science and Engineering, The University of Aizu, Aizu-Wakamatsu 965-8580, Japan Received 28 October 2020 / Accepted 26 January 2021 ABSTRACT A projectile accelerated by the Hayabusa2 Small Carry-on Impactor successfully produced an artificial impact crater with a final apparent diameter of 14:5 0:8 m on the surface of the near-Earth asteroid 162173 Ryugu on April 5, 2019. At the time of cratering, Deployable Camera 3 took± clear time-lapse images of the ejecta curtain, an assemblage of ejected particles forming a curtain-like structure emerging from the crater. -
List of Missions Using SPICE (PDF)
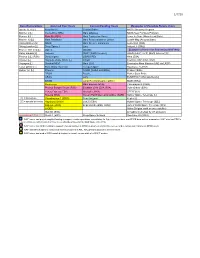
1/7/20 Data Restorations Selected Past Users Current/Pending Users Examples of Possible Future Users Apollo 15, 16 [L] Magellan [L] Cassini Orbiter NASA Discovery Program Mariner 2 [L] Clementine (NRL) Mars Odyssey NASA New Frontiers Program Mariner 9 [L] Mars 96 (RSA) Mars Exploration Rover Lunar IceCube (Moorehead State) Mariner 10 [L] Mars Pathfinder Mars Reconnaissance Orbiter LunaH-Map (Arizona State) Viking Orbiters [L] NEAR Mars Science Laboratory Luna-Glob (RSA) Viking Landers [L] Deep Space 1 Juno Aditya-L1 (ISRO) Pioneer 10/11/12 [L] Galileo MAVEN Examples of Users not Requesting NAIF Help Haley armada [L] Genesis SMAP (Earth Science) GOLD (LASP, UCF) (Earth Science) [L] Phobos 2 [L] (RSA) Deep Impact OSIRIS REx Hera (ESA) Ulysses [L] Huygens Probe (ESA) [L] InSight ExoMars RSP (ESA, RSA) Voyagers [L] Stardust/NExT Mars 2020 Emmirates Mars Mission (UAE via LASP) Lunar Orbiter [L] Mars Global Surveyor Europa Clipper Hayabusa-2 (JAXA) Helios 1,2 [L] Phoenix NISAR (NASA and ISRO) Proba-3 (ESA) EPOXI Psyche Parker Solar Probe GRAIL Lucy EUMETSAT GEO satellites [L] DAWN Lunar Reconnaissance Orbiter MOM (ISRO) Messenger Mars Express (ESA) Chandrayan-2 (ISRO) Phobos Sample Return (RSA) ExoMars 2016 (ESA, RSA) Solar Orbiter (ESA) Venus Express (ESA) Akatsuki (JAXA) STEREO [L] Rosetta (ESA) Korean Pathfinder Lunar Orbiter (KARI) Spitzer Space Telescope [L] [L] = limited use Chandrayaan-1 (ISRO) New Horizons Kepler [L] [S] = special services Hayabusa (JAXA) JUICE (ESA) Hubble Space Telescope [S][L] Kaguya (JAXA) Bepicolombo (ESA, JAXA) James Webb Space Telescope [S][L] LADEE Altius (Belgian earth science satellite) ISO [S] (ESA) Armadillo (CubeSat, by UT at Austin) Last updated: 1/7/20 Smart-1 (ESA) Deep Space Network Spectrum-RG (RSA) NAIF has or had project-supplied funding to support mission operations, consultation for flight team members, and SPICE data archive preparation. -

Navigation Challenges During Exomars Trace Gas Orbiter Aerobraking Campaign
NON-PEER REVIEW Please select category below: Normal Paper Student Paper Young Engineer Paper Navigation Challenges during ExoMars Trace Gas Orbiter Aerobraking Campaign Gabriele Bellei 1, Francesco Castellini 2, Frank Budnik 3 and Robert Guilanyà Jané 4 1 DEIMOS Space located at ESA/ESOC, Robert-Bosch-Str. 5, Darmstadt, 64293, Germany 2 Telespazio VEGA located at ESA/ESOC, Robert-Bosch-Str. 5, Darmstadt, 64293, Germany 3 ESA/ESOC, Robert-Bosch-Str. 5, Darmstadt, 64293, Germany 4 GMV INSYEN located at ESA/ESOC, Robert-Bosch-Str. 5, Darmstadt, 64293, Germany Abstract The ExoMars Trace Gas Orbiter satellite spent one year in aerobraking operations at Mars, lowering its orbit period from one sol to about two hours. This delicate phase challenged the operations team and in particular the navigation system due to the highly unpredictable Mars atmosphere, which imposed almost continuous monitoring, navigation and re-planning activities. An aerobraking navigation concept was, for the first time at ESA, designed, implemented and validated on-ground and in-flight, based on radiometric tracking data and complemented by information extracted from spacecraft telemetry. The aerobraking operations were successfully completed, on time and without major difficulties, thanks to the simplicity and robustness of the selected approach. This paper describes the navigation concept, presents a recollection of the main in-flight results and gives a retrospective of the main lessons learnt during this activity. Keywords: ExoMars, Trace Gas Orbiter, aerobraking, navigation, orbit determination, Mars atmosphere, accelerometer Introduction The ExoMars program is a cooperation between the European Space Agency (ESA) and Roscosmos for the robotic exploration of the red planet. -

EPOXI COMET ENCOUNTER FACT SHEET Nov
EPOXI COMET ENCOUNTER FACT SHEET Nov. 2, 2010 Quick Facts Flyby Spacecraft Dimensions: 3.3 meters (10.8 feet) long, 1.7 meters (5.6 feet) wide, and 2.3 meters (7.5 feet) high Weight: 601 kilograms (1,325 pounds) at launch, consisting of 517 kilograms (1,140 pounds) spacecraft and 84 kilograms (185 pounds) fuel. On 10/25/10 there was 4 kilograms (8.8 pounds) of fuel remaining. Power: 2.8-meter-by-2.8-meter (9-foot-by-9 foot) solar panel providing up to 750 watts, depending on distance from sun. Power storage via small, 16-amp- hourrechargeable nickel hydrogen battery Comet Hartley 2 Nucleus shape: Elongated Nucleus size (estimated): About 2.2 kilometers (1.4 miles) long Nucleus mass: Roughly 280 million metric tons Nucleus rotation period: About 18 hours Nucleus composition: Water ice, carbon dioxide ice, silicate dust Mission Launch: Jan. 12, 2005 Launch site: Cape Canaveral Air Force Station, Florida Launch vehicle: Delta II 7925 with Star 48 upper stage Impact with Tempel 1: 10:52 p.m. PDT July 3, 2005 (1:52 a.m. EDT July 4, 2005) Earth-comet distance at time of impact: 133.6 million kilometers (83 million miles) Total distance traveled by spacecraft from Earth to Tempel 1: 431 million kilometers (268 million miles) Flyby of Hartley 2: About 10 a.m. EDT or 7 a.m. PDT Nov. 4, 2010 Additional distance traveled by spacecraft to Hartley 2: About 4.6 billion kilometers (2.9 billion miles) Program Cost of Deep Impact: $267 million total (not including launch vehicle), consisting of $252 million spacecraft development and $15 million mission operations Cost of EPOXI extended mission: $42 million, for operations from 2007 to end of project at the end of fiscal year 2011. -
2001 Mars Odyssey 1/24 Scale Model Assembly Instructions
2001 Mars Odyssey 1/24 Scale Model Assembly Instructions This scale model of the 2001 Mars Odyssey spacecraft is designed for anyone interested, although it might be inappropriate for children younger than about ten years of age. Children should have adult supervision to assemble the model. Copyright (C) 2002 Jet Propulsion Laboratory, California Institute of Technology. All rights reserved. Permission for commercial reproduction other than for single-school in- classroom use must be obtained from JPL Commercial Programs Office. 1 SETUP 1.1 DOWNLOAD AND PRINT o You'll need Adobe Acrobat Reader software to read the Parts Sheet file. You'll find instructions for downloading the software free of charge from Adobe on the web page where you found this model. o Download the Parts file from the web page to your computer. It contains paper model parts on several pages of annotated graphics. o Print the Parts file with a black & white printer; a laser printer gives best results. It is highly recommended to print onto card stock (such as 110 pound cover paper). If you can't print onto card stock, regular paper will do, but assembly will be more difficult, and the model will be much more fragile. In any case, the card stock or paper should be white. The Parts file is designed for either 8.5x11-inch or A4 sheet sizes. o Check the "PRINTING CALIBRATION" on each Parts Sheet with a ruler, to be sure the cm or inch scale is full size. If it isn't, adjust the printout size in your printing software. -
ESTRACK Facilities Manual (EFM) Issue 1 Revision 1 - 19/09/2008 S DOPS-ESTR-OPS-MAN-1001-OPS-ONN 2Page Ii of Ii
fDOCUMENT document title/ titre du document ESA TRACKING STATIONS (ESTRACK) FACILITIES MANUAL (EFM) prepared by/préparé par Peter Müller reference/réference DOPS-ESTR-OPS-MAN-1001-OPS-ONN issue/édition 1 revision/révision 1 date of issue/date d’édition 19/09/2008 status/état Approved/Applicable Document type/type de document SSM Distribution/distribution see next page a ESOC DOPS-ESTR-OPS-MAN-1001- OPS-ONN EFM Issue 1 Rev 1 European Space Operations Centre - Robert-Bosch-Strasse 5, 64293 Darmstadt - Germany Final 2008-09-19.doc Tel. (49) 615190-0 - Fax (49) 615190 495 www.esa.int ESTRACK Facilities Manual (EFM) issue 1 revision 1 - 19/09/2008 s DOPS-ESTR-OPS-MAN-1001-OPS-ONN 2page ii of ii Distribution/distribution D/EOP D/EUI D/HME D/LAU D/SCI EOP-B EUI-A HME-A LAU-P SCI-A EOP-C EUI-AC HME-AA LAU-PA SCI-AI EOP-E EUI-AH HME-AT LAU-PV SCI-AM EOP-S EUI-C HME-AM LAU-PQ SCI-AP EOP-SC EUI-N HME-AP LAU-PT SCI-AT EOP-SE EUI-NA HME-AS LAU-E SCI-C EOP-SM EUI-NC HME-G LAU-EK SCI-CA EOP-SF EUI-NE HME-GA LAU-ER SCI-CC EOP-SA EUI-NG HME-GP LAU-EY SCI-CI EOP-P EUI-P HME-GO LAU-S SCI-CM EOP-PM EUI-S HME-GS LAU-SF SCI-CS EOP-PI EUI-SI HME-H LAU-SN SCI-M EOP-PE EUI-T HME-HS LAU-SP SCI-MM EOP-PA EUI-TA HME-HF LAU-CO SCI-MR EOP-PC EUI-TC HME-HT SCI-S EOP-PG EUI-TL HME-HP SCI-SA EOP-PL EUI-TM HME-HM SCI-SM EOP-PR EUI-TP HME-M SCI-SD EOP-PS EUI-TS HME-MA SCI-SO EOP-PT EUI-TT HME-MP SCI-P EOP-PW EUI-W HME-ME SCI-PB EOP-PY HME-MC SCI-PD EOP-G HME-MF SCI-PE EOP-GC HME-MS SCI-PJ EOP-GM HME-MH SCI-PL EOP-GS HME-E SCI-PN EOP-GF HME-I SCI-PP EOP-GU HME-CO SCI-PR -

High Precision Modelling of Thermal Perturbations with Application to Pioneer 10 and Rosetta
High precision modelling of thermal perturbations with application to Pioneer 10 and Rosetta Vom Fachbereich Produktionstechnik der UNIVERSITAT¨ BREMEN zur Erlangung des Grades Doktor-Ingenieur genehmigte Dissertation von Dipl.-Ing. Benny Rievers Gutachter: Prof. Dr.-Ing. Hans J. Rath Prof. Dr. rer. nat. Hansj¨org Dittus Fachbereich Produktionstechnik Fachbereich Produktionstechnik Universit¨at Bremen Universit¨at Bremen Tag der m¨undlichen Pr¨ufung: 13. Januar 2012 i Kurzzusammenfassung in Deutscher Sprache Das Hauptthema dieser Doktorarbeit ist die pr¨azise numerische Bestimmung von Thermaldruck (TRP) und Solardruck (SRP) f¨ur Satelliten mit komplexer Geome- trie. F¨ur beide Effekte werden analytische Modelle entwickelt und als generischen numerischen Methoden zur Anwendung auf komplexe Modellgeometrien umgesetzt. Die Analysemethode f¨ur TRP wird zur Untersuchung des Thermaldrucks f¨ur den Pio- neer 10 Satelliten f¨ur den kompletten Zeitraum seiner 30-j¨ahrigen Mission verwendet. Hierf¨ur wird ein komplexes dreidimensionales Finite-Elemente Modell des Satelliten einschließlich detaillierter Materialmodelle sowie dem detailliertem ¨außerem und in- nerem Aufbau entwickelt. Durch die Spezifizierung von gemessenen Temperaturen, der beobachteten Trajektorie sowie detaillierten Modellen f¨ur die W¨armeabgabe der verschiedenen Komponenten, wird eine genaue Verteilung der Temperaturen auf der Oberfl¨ache von Pioneer 10 f¨ur jeden Zeitpunkt der Mission bestimmt. Basierend auf den Ergebnissen der Temperaturberechnung wird der resultierende Thermaldruck mit Hilfe einer Raytracing-Methode unter Ber¨ucksichtigung des Strahlungsaustauschs zwischen den verschiedenen Oberf¨achen sowie der Mehrfachreflexion, berechnet. Der Verlauf des berechneten TRPs wird mit den von der NASA ver¨offentlichten Pioneer 10 Residuen verglichen, und es wird aufgezeigt, dass TRP die so genannte Pioneer Anomalie inner- halb einer Modellierungsgenauigkeit von 11.5 % vollst¨andig erkl¨aren kann.