TCRP Report 57: Track Design Handbook for Light Rail Transit
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

INDIAN RAILWAYS SCHEDULE of DIMENSIONS 1676Mm Gauge (BG)
INDIAN RAILWAYS SCHEDULE OF DIMENSIONS 1676mm Gauge (BG) REVISED, 2004 SCHEDULE OF DIMENSIONS-1676mm, GAUGE SHEDULE OF DIMENSIONS-1676MM GAUGE Schedule of Dimensions for Indian Railways, 1676mm Gauge Dear Sir/Dear Sirs, With their circular letter No. 735-W. of 1922, the Railway Board issued a Schedule of Maximum, Minimum and Recommended Dimensions to be observed on all 1676mm gauge Railways in India. In that Schedule, certain dimensions of the previous schedule of the year 1913 were modified with the object of permitting the use of enlarged rolling stock. 2. The Schedule of Dimensions of 1922 contained two distinct sections, namely, a schedule of "Maximum and Minimum Dimensions" which was considered to enable the proposed larger vehicles to run with about the same degree of safety as that which was previously obtained on the older Railways with existing stock, and a schedule of "Recommended Dimensions" intended to provide approximately the same clearances from fixed structures for the future larger vehicles as the 1913 schedule gave for existing vehicles. 3. In their circular letter No. 232-Tech.dated the 8th February, 1926, the Railway Board gave instructions that the Recommended Dimensions given in the 1922 Schedule were to be observed on important Railways in all new works and alterations to existing works. These orders were modified in letter No. 232-Tech. of the 26th April, 1926, which allowed a relaxation in the case of certain recommended dimensions, the adoption of which would involve heavy expenditure in remodeling works. 4. In 1929, it was found desirable further to amend the Schedule of 1922 in order to introduce certain improve- ments in the light of experience gained since it was issued, and to provide the clearances required by electric traction equipment on lines which were likely to be electrified in the future. -
High-Strength, Lightweight Car Bodies for High-Speed Rail Vehicles
High-Speed Rail IDEA Program High-Strength, Lightweight Car Bodies for High-Speed Rail Vehicles Final Report for High-Speed Rail IDEA Project 32 Prepared by: Timothy Langan and W. Mark Buchta Surface Treatment Technologies Baltimore, MD October 2003 INNOVATIONS DESERVING EXPLORATORY ANALYSIS (IDEA) PROGRAMS MANAGED BY THE TRANSPORTATION RESEARCH BOARD This investigation was performed as part of the High-Speed Rail IDEA program supports innovative methods and technology in support of the Federal Railroad Administration’s (FRA) next-generation high-speed rail technology development program. The High-Speed Rail IDEA program is one of four IDEA programs managed by TRB. The other IDEA programs are listed below. • NCHRP Highway IDEA focuses on advances in the design, construction, safety, and maintenance of highway systems, is part of the National Cooperative Highway Research Program. • Transit IDEA focuses on development and testing of innovative concepts and methods for improving transit practice. The Transit IDEA Program is part of the Transit Cooperative Research Program, a cooperative effort of the Federal Transit Administration (FTA), the Transportation Research Board (TRB) and the Transit Development Corporation, a nonprofit educational and research organization of the American Public Transportation Association. The program is funded by the FTA and is managed by TRB. • Safety IDEA focuses on innovative approaches to improving motor carrier, railroad, and highway safety. The program is supported by the Federal Motor Carrier Safety Administration -

NS Streetcar Line Portland, Oregon
Portland State University PDXScholar Urban Studies and Planning Faculty Nohad A. Toulan School of Urban Studies and Publications and Presentations Planning 6-24-2014 Do TODs Make a Difference? NS Streetcar Line Portland, Oregon Jenny H. Liu Portland State University, [email protected] Zakari Mumuni Portland State University Matt Berggren Portland State University Matt Miller University of Utah Arthur C. Nelson University of Utah SeeFollow next this page and for additional additional works authors at: https:/ /pdxscholar.library.pdx.edu/usp_fac Part of the Transportation Commons, Urban Studies Commons, and the Urban Studies and Planning Commons Let us know how access to this document benefits ou.y Citation Details Liu, Jenny H.; Mumuni, Zakari; Berggren, Matt; Miller, Matt; Nelson, Arthur C.; and Ewing, Reid, "Do TODs Make a Difference? NS Streetcar Line Portland, Oregon" (2014). Urban Studies and Planning Faculty Publications and Presentations. 124. https://pdxscholar.library.pdx.edu/usp_fac/124 This Report is brought to you for free and open access. It has been accepted for inclusion in Urban Studies and Planning Faculty Publications and Presentations by an authorized administrator of PDXScholar. Please contact us if we can make this document more accessible: [email protected]. Authors Jenny H. Liu, Zakari Mumuni, Matt Berggren, Matt Miller, Arthur C. Nelson, and Reid Ewing This report is available at PDXScholar: https://pdxscholar.library.pdx.edu/usp_fac/124 NS Streetcar Line Portland, Oregon Do TODs Make a Difference? Jenny H. Liu, Zakari Mumuni, Matt Berggren, Matt Miller, Arthur C. Nelson & Reid Ewing Portland State University 6/24/2014 ______________________________________________________________________________ DO TODs MAKE A DIFFERENCE? 1 of 35 Section 1-INTRODUCTION 2 of 35 ______________________________________________________________________________ Table of Contents 1-INTRODUCTION ......................................................................................................................................... -

New Principle Schemes of Freight Cars Bogies
April 2018, Vol. 18, No. 2 MANUFACTURING TECHNOLOGY ISSN 1213–2489 New Principle Schemes of Freight Cars Bogies Mykola Gorbunov1, Juraj Gerlici2, Sergey Kara1, Olena Nozhenko2, Ganna Chernyak1, Kateryna Kravchenko2, Tomas Lack2 1Institute transport and logistics, Volodymyr Dahl East Ukrainian National University, 03406 Tscentralny av., 59a, Se- werodonetsk, Ukraine. E-mail: [email protected], [email protected], [email protected] 2Faculty Mechanical Engineering, University of Zilina, 01026 Univerzitna 8215/1, Zilina, Slovakia. E-mail: juraj.ger- [email protected], [email protected], [email protected], [email protected] In the article the issue of perspective running parts for freight cars of new generation is considered and additions to the outdated existing classification of bogie are developed, namely introduction of such types of suspension is suggested.The results of theoretical studies are presented by means of modeling the movement of the car in the software "Universal Mechanism" to determine the influence of the first stage of spring suspension in Barber type bogie (type 18-100 and analogues) on energy efficiency (resistance to movement) and the estimated value of the decrease in resistance to movement.A concept for a fundamentally new design of a freight car bogie for high-speed traffic has been prepared, based on fundamentally new technical solutions with elastic-dissipative bearing ele- ments, as well as a concept for the modernization of the Barber-type bogie (type 18-100 and -

the Swindon and Cricklade Railway
The Swindon and Cricklade Railway Construction of the Permanent Way Document No: S&CR S PW001 Issue 2 Format: Microsoft Office 2010 August 2016 SCR S PW001 Issue 2 Copy 001 Page 1 of 33 Registered charity No: 1067447 Registered in England: Company No. 3479479 Registered office: Blunsdon Station Registered Office: 29, Bath Road, Swindon SN1 4AS 1 Document Status Record Status Date Issue Prepared by Reviewed by Document owner Issue 17 June 2010 1 D.J.Randall D.Herbert Joint PW Manager Issue 01 Aug 2016 2 D.J.Randall D.Herbert / D Grigsby / S Hudson PW Manager 2 Document Distribution List Position Organisation Copy Issued To: Copy No. (yes/no) P-Way Manager S&CR Yes 1 Deputy PW Manager S&CR Yes 2 Chairman S&CR (Trust) Yes 3 H&S Manager S&CR Yes 4 Office Files S&CR Yes 5 3 Change History Version Change Details 1 to 2 Updates throughout since last release SCR S PW001 Issue 2 Copy 001 Page 2 of 33 Registered charity No: 1067447 Registered in England: Company No. 3479479 Registered office: Blunsdon Station Registered Office: 29, Bath Road, Swindon SN1 4AS Table of Contents 1 Document Status Record ....................................................................................................................................... 2 2 Document Distribution List ................................................................................................................................... 2 3 Change History ..................................................................................................................................................... -
Safety Distances on Platforms Danger Zone
Bundesamt für Verkehr BAV Office fédéral des transports OFT Ufficio federale dei trasporti UFT Federal Office of Transport FOT Safety Distances on Platforms Danger Zone – Safety Zone Research Report 2011 Publication details Published by Federal Office of Transport (FOT) CH-3003 Bern Project coordination Federal Office of Transport (FOT) Safety department Nicolas Keusen Text Federal Office of Transport (FOT), Bern Swiss Federal Railways (SBB), Bern Figures Federal Office of Transport (FOT), Bern Daamen, W., Delft, Netherlands (photographs in Figure 8) [8] VSS, Zurich (Figure 9) [5] Citations Federal Office of Transport (FOT), 2011, Research Report - Safety Distances on Platforms, Bern Available from Free of charge from the internet: www.bav.admin.ch French edition: Distances sur les quais – Rapport de recherche Title photo Warning notice for rail passengers 'Safety Distances on Platforms' Research Report Contents III CONTENTS ABBREVIATIONS AND DESIGNATIONS 5 1. SUMMARY 6 1.1 Danger zone 6 1.2 Safety zone 6 2. INTRODUCTION 7 2.1 Background to this report 7 2.2 Layout of the report 7 3. TERMINOLOGY 8 DANGER ZONE 9 4. INTRODUCTION 10 4.1 Subject matter 10 4.2 Purpose 10 4.3 Scope of the study and area to which it applies 10 5. REFERENCE DOCUMENTS 11 6. PROCEDURE AND METHODOLOGY 12 7. DETERMINING PERMISSIBLE AND IMPERMISSIBLE RISKS 13 8. DETERMINING THE STUDY PARAMETERS 14 9. STUDY AND DISCUSSION OF PARAMETERS AND CONSEQUENCES 15 9.1 Clearance profile 15 9.2 Contact 15 9.3 Aerodynamics 17 9.3.1 Theoretical and experimental documents 18 9.3.2 Danger threshold 19 9.3.3 Analysis of the results 20 9.3.4 A comparison between the two studies 21 9.4 Effect of surprise 22 9.4.1 Cause 22 9.4.2 Reaction 22 9.4.3 Conclusion 22 9.5 Noise level 22 9.5.1 Beneficial effect 23 9.5.2 Unfavourable effect 23 9.6 Dust 23 9.7 Behaviour of people on the platform 23 9.8 Local circumstances 24 'Safety Distances on Platforms' Research Report IV Contents 10. -

Eastwick Intermodal Center
Eastwick Intermodal Center January 2020 New vo,k City • p-~ d DELAWARE VALLEY DVRPC's vision for the Greater Ph iladelphia Region ~ is a prosperous, innovative, equitable, resilient, and fJ REGl!rpc sustainable region that increases mobility choices PLANNING COMMISSION by investing in a safe and modern transportation system; Ni that protects and preserves our nat ural resources w hile creating healthy communities; and that fosters greater opportunities for all. DVRPC's mission is to achieve this vision by convening the widest array of partners to inform and facilitate data-driven decision-making. We are engaged across the region, and strive to be lea ders and innovators, exploring new ideas and creating best practices. TITLE VI COMPLIANCE / DVRPC fully complies with Title VJ of the Civil Rights Act of 7964, the Civil Rights Restoration Act of 7987, Executive Order 72898 on Environmental Justice, and related nondiscrimination mandates in all programs and activities. DVRPC's website, www.dvrpc.org, may be translated into multiple languages. Publications and other public documents can usually be made available in alternative languages and formats, if requested. DVRPC's public meetings are always held in ADA-accessible facilities, and held in transit-accessible locations whenever possible. Translation, interpretation, or other auxiliary services can be provided to individuals who submit a request at least seven days prior to a public meeting. Translation and interpretation services for DVRPC's projects, products, and planning processes are available, generally free of charge, by calling (275) 592-7800. All requests will be accommodated to the greatest extent possible. Any person who believes they have been aggrieved by an unlawful discriminatory practice by DVRPC under Title VI has a right to file a formal complaint. -
MIT Kendall Square
Ridership and Service Statistics Thirteenth Edition 2010 Massachusetts Bay Transportation Authority MBTA Service and Infrastructure Profile July 2010 MBTA Service District Cities and Towns 175 Size in Square Miles 3,244 Population (2000 Census) 4,663,565 Typical Weekday Ridership (FY 2010) By Line Unlinked Red Line 241,603 Orange Line 184,961 Blue Line 57,273 Total Heavy Rail 483,837 Total Green Line (Light Rail & Trolley) 236,096 Bus (includes Silver Line) 361,676 Silver Line SL1 & SL2* 14,940 Silver Line SL4 & SL5** 15,086 Trackless Trolley 12,364 Total Bus and Trackless Trolley 374,040 TOTAL MBTA-Provided Urban Service 1,093,973 System Unlinked MBTA - Provided Urban Service 1,093,973 Commuter Rail Boardings (Inbound + Outbound) 132,720 Contracted Bus 2,603 Water Transportation 4,372 THE RIDE Paratransit Trips Delivered 6,773 TOTAL ALL MODES UNLINKED 1,240,441 Notes: Unlinked trips are the number of passengers who board public transportation vehicles. Passengers are counted each time they board vehicles no matter how many vehicles they use to travel from their origin to their destination. * Average weekday ridership taken from 2009 CTPS surveys for Silver Line SL1 & SL2. ** SL4 service began in October 2009. Ridership represents a partial year of operation. File: CH 01 p02-7 - MBTA Service and Infrastructure Profile Jul10 1 Annual Ridership (FY 2010) Unlinked Trips by Mode Heavy Rail - Red Line 74,445,042 Total Heavy Rail - Orange Line 54,596,634 Heavy Rail Heavy Rail - Blue Line 17,876,009 146,917,685 Light Rail (includes Mattapan-Ashmont Trolley) 75,916,005 Bus (includes Silver Line) 108,088,300 Total Rubber Tire Trackless Trolley 3,438,160 111,526,460 TOTAL Subway & Bus/Trackless Trolley 334,360,150 Commuter Rail 36,930,089 THE RIDE Paratransit 2,095,932 Ferry (ex. -
Rtd Light Rail Design Criteria
RTD LIGHT RAIL DESIGN CRITERIA Regional Transportation District November 2005 Prepared by the Engineering Division of the Regional Transportation District Regional Transportation District 1600 Blake Street Denver, Colorado 80202-1399 303.628.9000 RTD-Denver.com November 28, 2005 The RTD Light Rail Design Criteria Manual has been developed as a set of general guidelines as well as providing specific criteria to be employed in the preparation and implementation of the planning, design and construction of new light rail corridors and the extension of existing corridors. This 2005 issue of the RTD Light Rail Design Criteria Manual was developed to remain in compliance with accepted practices with regard to safety and compatibility with RTD's existing system and the intended future systems that will be constructed by RTD. The manual reflects the most current accepted practices and applicable codes in use by the industry. The intent of this manual is to establish general criteria to be used in the planning and design process. However, deviations from these accepted criteria may be required in specific instances. Any such deviations from these accepted criteria must be approved by the RTD's Executive Safety & Security Committee. Coordination with local agencies and jurisdictions is still required for the determination and approval for fire protection, life safety, and security measures that will be implemented as part of the planning and design of the light rail system. Conflicting information or directives between the criteria set forth in this manual shall be brought to the attention of RTD and will be addressed and resolved between RTD and the local agencies andlor jurisdictions. -
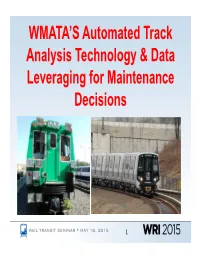
WMATA's Automated Track Analysis Technology & Data Leveraging For
WMATA’S Automated Track Analysis Technology & Data Leveraging for Maintenance Decisions 1 WMATA System • 6 Lines: 5 radial and 1 spur • 234 mainline track miles and 91 stations • Crew of 54 Track Inspectors and 8 Supervisors walk and inspect each line twice a week. • WMATA’s TGV and 7000 Series revenue vehicles, provide different approaches to automatic track inspection abilities. 2 Track Geometry Vehicle (TGV) • Provides services previously contracted out. • Equipped with high resolution cameras inspecting ROW and tunnels, infrared camera monitoring surrounding temperatures, and ultrasonic inspection system. • Measures track geometry parameters, and produces reports where track parameters do not meet WMATA’s maintenance and safety standards. 3 TGV Measured Parameters . Track gage, rail profile, cross level, alignment, twists, and warps. Platform height and gap, . 3rd rail: height, gage, missing cover board, and temperature. • Inspects track circuits transmitting speed commands and signals for train occupancy detection with different carrier frequencies and code rates. 4 TGV Technology • Parameters such as rail profile, gage distances, 3rd rail and platform gap distances are measured via laser beam shot across running rails, and platforms. • High-speed/high-resolution cameras take high resolution images of the surface where lasers makes contact with the rail. 5 TGV Technology • Track profile is measured via vertical accelerometers, and an algorithm converting acceleration into displacement. • Track alignment is measured with a lateral accelerometer in combination with image analysis. • Warps, twists, and cross levels are measured via gyros and inclinometers, along with distance measurements. 6 Kawasaki 7000 Series Cars • Cars are assembled into 4-Pack sets for operation. • 7K cars are equipped with a system of accelerometers that are mounted on 15% of the B cars. -

Coverrailway Curves Book.Cdr
RAILWAY CURVES March 2010 (Corrected & Reprinted : November 2018) INDIAN RAILWAYS INSTITUTE OF CIVIL ENGINEERING PUNE - 411 001 i ii Foreword to the corrected and updated version The book on Railway Curves was originally published in March 2010 by Shri V B Sood, the then professor, IRICEN and reprinted in September 2013. The book has been again now corrected and updated as per latest correction slips on various provisions of IRPWM and IRTMM by Shri V B Sood, Chief General Manager (Civil) IRSDC, Delhi, Shri R K Bajpai, Sr Professor, Track-2, and Shri Anil Choudhary, Sr Professor, Track, IRICEN. I hope that the book will be found useful by the field engineers involved in laying and maintenance of curves. Pune Ajay Goyal November 2018 Director IRICEN, Pune iii PREFACE In an attempt to reach out to all the railway engineers including supervisors, IRICEN has been endeavouring to bring out technical books and monograms. This book “Railway Curves” is an attempt in that direction. The earlier two books on this subject, viz. “Speed on Curves” and “Improving Running on Curves” were very well received and several editions of the same have been published. The “Railway Curves” compiles updated material of the above two publications and additional new topics on Setting out of Curves, Computer Program for Realignment of Curves, Curves with Obligatory Points and Turnouts on Curves, with several solved examples to make the book much more useful to the field and design engineer. It is hoped that all the P.way men will find this book a useful source of design, laying out, maintenance, upgradation of the railway curves and tackling various problems of general and specific nature. -
Rocky Mountain Express
ROCKY MOUNTAIN EXPRESS TEACHER’S GUIDE TABLE OF CONTENTS 3 A POSTCARD TO THE EDUCATOR 4 CHAPTER 1 ALL ABOARD! THE FILM 5 CHAPTER 2 THE NORTH AMERICAN DREAM REFLECTIONS ON THE RIBBON OF STEEL (CANADA AND U.S.A.) X CHAPTER 3 A RAILWAY JOURNEY EVOLUTION OF RAIL TRANSPORT X CHAPTER 4 THE LITTLE ENGINE THAT COULD THE MECHANICS OF THE RAILWAY AND TRAIN X CHAPTER 5 TALES, TRAGEDIES, AND TRIUMPHS THE RAILWAY AND ITS ENVIRONMENTAL CHALLENGES X CHAPTER 6 DO THE CHOO-CHOO A TRAIL OF INFLUENCE AND INSPIRATION X CHAPTER 7 ALONG THE RAILROAD TRACKS ACTIVITIES FOR THE TRAIN-MINDED 2 A POSTCARD TO THE EDUCATOR 1. Dear Educator, Welcome to our Teacher’s Guide, which has been prepared to help educators integrate the IMAX® motion picture ROCKY MOUNTAIN EXPRESS into school curriculums. We designed the guide in a manner that is accessible and flexible to any school educator. Feel free to work through the material in a linear fashion or in any order you find appropriate. Or concentrate on a particular chapter or activity based on your needs as a teacher. At the end of the guide, we have included activities that embrace a wide range of topics that can be developed and adapted to different class settings. The material, which is targeted at upper elementary grades, provides students the opportunity to explore, to think, to express, to interact, to appreciate, and to create. Happy discovery and bon voyage! Yours faithfully, Pietro L. Serapiglia Producer, Rocky Mountain Express 2. Moraine Lake and the Valley of the Ten Peaks, Banff National Park, Alberta 3 The Film The giant screen motion picture Rocky Mountain Express, shot with authentic 15/70 negative which guarantees astounding image fidelity, is produced and distributed by the Stephen Low Company for exhibition in IMAX® theaters and other giant screen theaters.