Thesis Front Matter
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

UPPER BLACKFOOT MINING COMPLEX 50% Preliminary Restoration Design Lincoln, Montana
Story Mill Wetland Delineation UPPER BLACKFOOT MINING COMPLEX 50% Preliminary Restoration Design Lincoln, Montana Submitted To: State of Montana, Department of Justice Natural Resource Damage Program PO Box 201425 Helena, Montana 59620 Prepared By: River Design Group, Inc. 5098 Highway 93 South Whitefish, Montana 59937 Geum Environmental Consulting, Inc. 307 State Street Hamilton, Montana 59840 March 2014 Preliminary Design Report This page left intentionally blank -i- Preliminary Design Report Table of Contents 1 Introduction .................................................................................................... 1 1.1 Project Background .......................................................................................................... 3 1.2 Evaluation of Alternatives ................................................................................................ 5 1.2.1 Description of Alternatives ....................................................................................... 5 1.2.2 Evaluation of Alternatives ......................................................................................... 5 1.2.3 Evaluation Summary ................................................................................................. 8 1.3 Project Vision, Goals and Objectives ................................................................................ 9 1.4 Restoration Strategies .................................................................................................... 10 1.5 Project Area Description ............................................................................................... -

Avalanche Defences for the Trans-Canada Highway at Rogers Pass Schaerer, P
NRC Publications Archive Archives des publications du CNRC Avalanche defences for the Trans-Canada Highway at Rogers Pass Schaerer, P. A. For the publisher’s version, please access the DOI link below./ Pour consulter la version de l’éditeur, utilisez le lien DOI ci-dessous. Publisher’s version / Version de l'éditeur: https://doi.org/10.4224/20358539 Technical Paper (National Research Council of Canada. Division of Building Research), 1962-11 NRC Publications Archive Record / Notice des Archives des publications du CNRC : https://nrc-publications.canada.ca/eng/view/object/?id=c276ab3a-c720-4997-9ad8-ff6f9f9a7738 https://publications-cnrc.canada.ca/fra/voir/objet/?id=c276ab3a-c720-4997-9ad8-ff6f9f9a7738 Access and use of this website and the material on it are subject to the Terms and Conditions set forth at https://nrc-publications.canada.ca/eng/copyright READ THESE TERMS AND CONDITIONS CAREFULLY BEFORE USING THIS WEBSITE. L’accès à ce site Web et l’utilisation de son contenu sont assujettis aux conditions présentées dans le site https://publications-cnrc.canada.ca/fra/droits LISEZ CES CONDITIONS ATTENTIVEMENT AVANT D’UTILISER CE SITE WEB. Questions? Contact the NRC Publications Archive team at [email protected]. If you wish to email the authors directly, please see the first page of the publication for their contact information. Vous avez des questions? Nous pouvons vous aider. Pour communiquer directement avec un auteur, consultez la première page de la revue dans laquelle son article a été publié afin de trouver ses coordonnées. Si vous n’arrivez pas à les repérer, communiquez avec nous à [email protected]. -

2020 Land Management Plan, Helena
United States Department of Agriculture 2020 Land Management Plan Helena - Lewis and Clark National Forest Forest Service Helena - Lewis and Clark National Forest R1-20-16 May 2020 In accordance with federal civil rights law and U.S. Department of Agriculture (USDA) civil rights regulations and policies, the USDA, its Agencies, offices, and employees, and institutions participating in or administering USDA programs are prohibited from discriminating based on race, color, national origin, religion, sex, gender identity (including gender expression), sexual orientation, disability, age, marital status, family/parental status, income derived from a public assistance program, political beliefs, or reprisal or retaliation for prior civil rights activity, in any program or activity conducted or funded by USDA (not all bases apply to all programs). Remedies and complaint filing deadlines vary by program or incident. Persons with disabilities who require alternative means of communication for program information (for example, Braille, large print, audiotape, American Sign Language, etc.) should contact the responsible Agency or USDA’s TARGET Center at (202) 720-2600 (voice and TTY) or contact USDA through the Federal Relay Service at (800) 877-8339. Additionally, program information may be made available in languages other than English. To file a program discrimination complaint, complete the USDA Program Discrimination Complaint Form, AD-3027, found online at http://www.ascr.usda.gov/complaint_filing_cust.html and at any USDA office or write a letter addressed to USDA and provide in the letter all of the information requested in the form. To request a copy of the complaint form, call (866) 632-9992. Submit your completed form or letter to USDA by: (1) mail: U.S. -
A History of the Railway Through Rogers Pass from 1865 to 1916
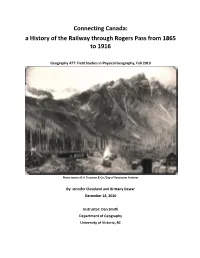
Connecting Canada: a History of the Railway through Rogers Pass from 1865 to 1916 Geography 477: Field Studies in Physical Geography, Fall 2010 Photo source: R.H. Trueman & Co./City of Vancouver Archives By: Jennifer Cleveland and Brittany Dewar December 18, 2010 Instructor: Dan Smith Department of Geography University of Victoria, BC Table of Content 1.0 Introduction…………………………………………………………………………………………………………………………3 2.0 Study Area and Data…………………………………………………………………………………………………………….3 3.0 Methods………………………………………………………………………………………………………………………………4 4.0 Historical Themes and Maps………………………………………………………………………………………………..7 4.1 Expeditions……………………………………………………………………………………………………………….7 Figure 2: Finding the Pass: Exploration Routes from 1865-1882……………………………….9 4.2 Community…………………………………………………………………………………………………………….10 Figure 3: Rogers Pass Community 1909………………………………………………….………………...13 4.3 Challenges to Operation of the Railway through Rogers Pass………………………………...14 Figure 4: Avalanche Occurrences in Rogers Pass 1885-1910…………………………………...17 5.0 Discussion and conclusion………………………………………………………………………………………………….18 5.1 Mapping: Purpose and Difficulties………………………………………………………………………….18 5.2 Historical Insights: Community……………………………………………………………………………….19 5.3 Historical Insights: Reasons and Consequences of building the Railway through Rogers Pass…………………………………………………………………………………………………………………..19 6.0 Acknowledgements……………………………………………………………………………………………………………21 7.0 References…………………………………………………………………………………………………………………………22 Appendix A: Time line of avalanches occurring in Rogers -
Rocky Mountain Express
ROCKY MOUNTAIN EXPRESS TEACHER’S GUIDE TABLE OF CONTENTS 3 A POSTCARD TO THE EDUCATOR 4 CHAPTER 1 ALL ABOARD! THE FILM 5 CHAPTER 2 THE NORTH AMERICAN DREAM REFLECTIONS ON THE RIBBON OF STEEL (CANADA AND U.S.A.) X CHAPTER 3 A RAILWAY JOURNEY EVOLUTION OF RAIL TRANSPORT X CHAPTER 4 THE LITTLE ENGINE THAT COULD THE MECHANICS OF THE RAILWAY AND TRAIN X CHAPTER 5 TALES, TRAGEDIES, AND TRIUMPHS THE RAILWAY AND ITS ENVIRONMENTAL CHALLENGES X CHAPTER 6 DO THE CHOO-CHOO A TRAIL OF INFLUENCE AND INSPIRATION X CHAPTER 7 ALONG THE RAILROAD TRACKS ACTIVITIES FOR THE TRAIN-MINDED 2 A POSTCARD TO THE EDUCATOR 1. Dear Educator, Welcome to our Teacher’s Guide, which has been prepared to help educators integrate the IMAX® motion picture ROCKY MOUNTAIN EXPRESS into school curriculums. We designed the guide in a manner that is accessible and flexible to any school educator. Feel free to work through the material in a linear fashion or in any order you find appropriate. Or concentrate on a particular chapter or activity based on your needs as a teacher. At the end of the guide, we have included activities that embrace a wide range of topics that can be developed and adapted to different class settings. The material, which is targeted at upper elementary grades, provides students the opportunity to explore, to think, to express, to interact, to appreciate, and to create. Happy discovery and bon voyage! Yours faithfully, Pietro L. Serapiglia Producer, Rocky Mountain Express 2. Moraine Lake and the Valley of the Ten Peaks, Banff National Park, Alberta 3 The Film The giant screen motion picture Rocky Mountain Express, shot with authentic 15/70 negative which guarantees astounding image fidelity, is produced and distributed by the Stephen Low Company for exhibition in IMAX® theaters and other giant screen theaters. -

Sarah K. Fortner
SARAH K. FORTNER Byrd Polar Research Center, The Ohio State University, 1090 Carmack Road, Columbus, OH 43210 USA telephone: 614-688-0080 (w), 614-353-6183 (h), e-mail: [email protected] EDUCATION: The Ohio State University, School of Earth Sciences PhD 2008 (Dec) (Advisor, Dr. Berry Lyons) The Ohio State University, Geological Sciences MS 2002 University of Wisconsin-Madison, Geology and Geophysics BS 1999 APPOINTMENTS: 2008 (Dec)- Postdoctoral Researcher Climate Water, and Carbon Program, The Ohio State University 2007 (Aug)-2008 (Dec) Graduate Research Assistant Byrd Polar Research Center, The Ohio State University 2006-2007 NSF Graduate K-12 Teaching Fellow 2004-2005 Graduate Teaching Assistant School of Earth Sciences, The Ohio State University 2002-2004 GIS/Website Research Associate Division of Wildlife, Ohio Department of Natural Resources 2000-2002 Graduate Teaching Assistant Department of Geological Sciences (now the School of Earth Sciences), The Ohio State University 1999-2000 Hydrologist US Geological Survey, Wisconsin Summer 1998 Volunteer Glaciologist Columbia Mountains Institute, British Columbia Summer 1997 Hydrologic Aide US Geological Survey, Minnesota RESEARCH INTERESTS: Low Temperature Hydrogeochemistry, Climate and Geochemical Response, Biogeochemical Cycling, Anthropogenic Influence on Geochemistry, Eolian Processes TEACHING INTERESTS: Environmental and Aqueous Geochemistry, Climate Change, Biogeochemical Cycling, Paleoclimate PUBLICATIONS: Fortner, S.K., Lyons, W.B., Fountain, A.G., Welch, K.A., Kehrwald, N. M, (in press). Trace element and major ion concentrations and dynamics in glacier snow and melt: Eliot Glacier, Oregon Cascades. Hydrological Processes. Fortner, S.K., Fourth and fifth grade students learn about renewable and nonrenewable energy through inquiry, 2009. Journal of Geoscience Education 57(2): 121-127. -

Fall 2017 Golden Eagle Migration Survey Big Belt Mountains, Montana
Fall 2017 Golden Eagle Migration Survey Big Belt Mountains, Montana (Photo by David Brandes) Report prepared by: Steve Hoffman & Bret Davis Report submitted to: U.S. Forest Service, Helena-Lewis & Clark National Forest ATTN: Denise Pengeroth, Forest Biologist 3425 Skyway Drive, Helena, MT 59602 March 2018 FALL 2017 GOLDEN EAGLE MIGRATION SURVEY IN THE BIG BELT MOUNTAINS, MONTANA Report prepared by: Steve Hoffman & Bret Davis Counts conducted by: Jeff Grayum & Hilary Turner Project coordinated by: GEMS Committee Project Coordinator: Janice Miller, President Last Chance Audubon, P.O. Box 924, Helena, MT 59624-0001 Report submitted to: U.S. Forest Service, Helena-Lewis & Clark National Forest ATTN: Denise Pengeroth, Forest Biologist 3425 Skyway Drive, Helena, MT 59602 March 2018 i TABLE OF CONTENTS List of Tables .....................................................................................................................................iii List of Figures ....................................................................................................................................iii List of Appendices .............................................................................................................................iv Introduction .........................................................................................................................................1 Study Site ............................................................................................................................................2 -

Southwest MONTANA
visitvisit SouthWest MONTANA 2017 OFFICIAL REGIONAL TRAVEL GUIDE SOUTHWESTMT.COM • 800-879-1159 Powwow (Lisa Wareham) Sawtooth Lake (Chuck Haney) Horses (Michael Flaherty) Bannack State Park (Donnie Sexton) SouthWest MONTANABetween Yellowstone National Park and Glacier National Park lies a landscape that encapsulates the best of what Montana’s about. Here, breathtaking crags pierce the bluest sky you’ve ever seen. Vast flocks of trumpeter swans splash down on the emerald waters of high mountain lakes. Quiet ghost towns beckon you back into history. Lively communities buzz with the welcoming vibe and creative energy of today’s frontier. Whether your passion is snowboarding or golfing, microbrews or monster trout, you’ll find endless riches in Southwest Montana. You’ll also find gems of places to enjoy a hearty meal or rest your head — from friendly roadside diners to lavish Western resorts. We look forward to sharing this Rexford Yaak Eureka Westby GLACIER Whitetail Babb Sweetgrass Four Flaxville NATIONAL Opheim Buttes Fortine Polebridge Sunburst Turner remarkable place with you. Trego St. Mary PARK Loring Whitewater Peerless Scobey Plentywood Lake Cut Bank Troy Apgar McDonald Browning Chinook Medicine Lake Libby West Glacier Columbia Shelby Falls Coram Rudyard Martin City Chester Froid Whitefish East Glacier Galata Havre Fort Hinsdale Saint Hungry Saco Lustre Horse Park Valier Box Belknap Marie Elder Dodson Vandalia Kalispell Essex Agency Heart Butte Malta Culbertson Kila Dupuyer Wolf Marion Bigfork Flathead River Glasgow Nashua Poplar Heron Big Sandy Point Somers Conrad Bainville Noxon Lakeside Rollins Bynum Brady Proctor Swan Lake Fort Fairview Trout Dayton Virgelle Peck Creek Elmo Fort Benton Loma Thompson Big Arm Choteau Landusky Zortman Sidney Falls Hot Springs Polson Lambert Crane Condon Fairfield Great Ronan Vaughn Haugan Falls Savage De Borgia Plains Charlo Augusta CONTENTS Paradise Winifred Bloomfield St. -

Montana Trip August 2018
Montana Trip By Randy Carmichael As a native Florida flatlander, for many years now I’ve wanted to learn a little about mountain flying. After a couple annual postponements when “life got in the way” I was finally able to pursue my plan in early August 2018. I had booked 3 days of mountain flying training with Jeanne MacPherson, a highly recommended instructor in Helena, Montana. Jeanne runs a flight instruction operation called Mountain Airdance when she’s not busy flying the Governor around Montana in the state King Air. She specializes in aerobatics and back-country mountain flying, and her history as a previous Bonanza owner made her an ideal choice to help me learn the capabilities and limitations of my P35 Bonanza in the rugged mountain terrain west of Helena. In planning the trip I wanted to do a lot of VFR sightseeing in order to avoid my typical “point-A-to-point-B” travel mentality. Turns out the Missouri River, which ends where it empties into the Mississippi at St. Louis is not only the longest river in the U.S., but its headwaters are only 30 miles from Helena Montana at a place aptly named Three Forks by the Lewis & Clark expedition. Perfect! After packing our tent and camping gear in N61RP, my black lab co-pilot Coaster and I set out on Sunday August 5. After a brief weather warmup over the Smokies we skirted the busy St. Louis bravo airspace and first picked up the mighty Missouri on Monday just west of Sprit of St. -

Montana Big Sky Country and the Last, Best Place
Montana Big Sky Country and the Last, Best Place By Donald Potts, Montana State Climatologist Montana is a pretty big State (4th largest), without a lot of people (48th in population density). Our climate is very complex due to highly variable topography. The northern Rocky Mountains and the Continental Divide allow the western 1/3 of the State to receive a modified northern Pacific coast climate clouds, humidity and precipitation. The eastern 2/3 of the State lies on the northern Great Plains and the climate is semi- arid and continental. Given that Montana is pretty big and there aren’t a lot of people here, we don’t make that many weather measurements. Nevertheless, we still end up with a number of “Top 10’s”, though some of them aren’t really things to crow about. While western Montana gets a lot of influence from the Pacific Ocean, the eastern side of the State more than makes up for it, producing the 6th driest State overall. The “northern” part of the topography description results in the 6th coldest State overall as well. The Rocky Mountains really do play an important role in our climate. The coldest temperature ever recorded in the lower 48 States was on Rogers Pass (5610’ elevation). The 6th cloudiest city in the US is Kalispell, west of the divide. The 7th windiest city in the US is Great Falls which also boasts the 4th cleanest air. Related to the winds, the mountains also produce tremendous temperature fluctuations usually during events called “Chinooks”. The fastest 7-minute (34 degrees), 15-minute (42 degrees), and 24 hour (103 degrees! 54F to + 49F!) warm-ups ever recorded in the US happened along the Rocky Mountain front in eastern Montana. -

Day Hikes Lincoln
Lincoln Ranger District Lewis and Clark Pass Stonewall Lookout The Lincoln Ranger District lies within the northern DAY HIKES 493 417 and 418 region of the Helena National Forest. Visitors have the Distance: opportunity to partake in a variety of recreational activities and experience the marvels of our National 11.0 miles NEAR Forests. The Lincoln Ranger District also manages (round trip from Snow- 82,000 acres of the Scapegoat Wilderness Area, and bank Lake) provides critical habitat to grizzly bears, lynx, and 13.3 miles wolves. LINCOLN (round trip from Sucker Creek Rd) Distance: 3.2 miles round trip Rating: Difficult Rating: Moderate At 8,270 feet in elevation, this mountain hike will Lewis and a party of nine men followed an Indian trail give you many opportunities to see the beautiful that the Shoshone called Cokahlarishkit, or the “River Road Blackfoot Valley. Once reaching the top of Stonewall to the Buffalo” on their return journey to St. Louis in 1806. All Trails The trail led them over what is now called Lewis and Clark Pass Mountain, visit the lookout and catch a breathtak- listed are located (even though Clark never crossed it). In the early 1900s, this of the Garnet and Flint mountain ranges, and within the Northern ing view was the main road over the Continental Divide, therefore it is Continental Divide Ecosystem the Scapegoat Wilderness. This hike is ideal for an over- well marked, wide, and a gradual climb to the pass— (NCDE) Grizzly Bear recovery area. night backpack trip with several locations to camp near the Caution should always be used while hiking in bear perfect for a family hike. -

Weather Extremes
Answers archive: Weather extremes Link: http://www.usatoday.com/weather/resources/askjack/archives-weather-extremes.htm Q: What's the hottest city in the country? A: When measured by average year-round temperature, the hottest city is Key West, where the temperature averages 78°F. A better measurement is a city’s average high temperature in July, taken during the hottest of the hot weather. Using this method, the hottest U.S. city is Lake Havasu City, Ariz., which has an average July daily high temperature of about 111°F. As for large cities, the hottest is Phoenix, where the typical July day has a high of 106°F. This information is from Christopher Burt's book Extreme Weather. (Answered by Doyle Rice, USA TODAY’s weather editor, July 23, 2007) Q: How much do Hawaii's temperatures vary throughout the year? A: Thanks to the moderating influence of the Pacific Ocean, Hawaii has a mild, tropical climate, where the temperatures don't change all that much on a day-to-day basis, in comparison to much of the USA. To illustrate this, compare Hawaii and the continental climate of Fargo, N.D. The average high temperature in Honolulu in January is about 80°F. In August, it’s about 89°F. Compare that to Fargo's high of 16°F in January and 81°F in August. Where Hawaii's high temperature only varied 9°F from summer to winter, Fargo's varied 65°F. This USA TODAY state snapshot has more about the weather and climate of Hawaii, as does this report from the National Weather Service in Honolulu.