Move Your Wheelchair with Your Eyes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Electroretinography 1 Electroretinography
Electroretinography 1 Electroretinography Electroretinography measures the electrical responses of various cell types in the retina, including the photoreceptors (rods and cones), inner retinal cells (bipolar and amacrine cells), and the ganglion cells. Electrodes are usually placed on the cornea and the skin near the eye, although it is possible to record the ERG from skin electrodes. During a recording, the patient's eyes are exposed to standardized stimuli and the resulting signal is displayed showing the time course of the signal's Maximal response ERG waveform from a dark adapted eye. amplitude (voltage). Signals are very small, and typically are measured in microvolts or nanovolts. The ERG is composed of electrical potentials contributed by different cell types within the retina, and the stimulus conditions (flash or pattern stimulus, whether a background light is present, and the colors of the stimulus and background) can elicit stronger response from certain components. If a flash ERG is performed on a dark-adapted eye, the response is primarily from the rod system and flash ERGs performed on a light adapted eye will reflect the activity of the cone system. To sufficiently bright flashes, the ERG will contain an A patient undergoing an electroretinogram a-wave (initial negative deflection) followed by a b-wave (positive deflection). The leading edge of the a-wave is produced by the photoreceptors, while the remainder of the wave is produced by a mixture of cells including photoreceptors, bipolar, amacrine, and Muller cells or Muller glia.[1] The pattern ERG, evoked by an alternating checkerboard stimulus, primarily reflects activity of retinal ganglion cells. -

Assessment and Management of Infantile Nystagmus Syndrome
perim Ex en l & ta a l ic O p in l h t C h f Journal of Clinical & Experimental a o l m l a o n l r o Atilla, J Clin Exp Ophthalmol 2016, 7:2 g u y o J Ophthalmology 10.4172/2155-9570.1000550 ISSN: 2155-9570 DOI: Review Article Open Access Assessment and Management of Infantile Nystagmus Syndrome Huban Atilla* Department of Ophthalmology, Faculty of Medicine, Ankara University, Turkey *Corresponding author: Huban Atilla, Department of Ophthalmology, Faculty of Medicine, Ankara University, Turkey, Tel: +90 312 4462345; E-mail: [email protected] Received date: March 08, 2016; Accepted date: April 26, 2016; Published date: April 29, 2016 Copyright: © 2016 Atilla H. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited. Abstract This article is a review of infantile nystagmus syndrome, presenting with an overview of the physiological nystagmus and the etiology, symptoms, clinical evaluation and treatment options. Keywords: Nystagmus syndrome; Physiologic nystagmus phases; active following of the stimulus results in poor correspondence between eye position and stimulus position. At higher velocity targets Introduction (greater than 100 deg/sec) optokinetic nystagmus can no longer be evoked. Unlike simple foveal smooth pursuit, OKN appears to have Nystagmus is a rhythmic, involuntary oscillation of one or both both foveal and peripheral retinal components [3]. Slow phase of the eyes. There are various classifications of nystagmus according to the nystagmus is for following the target and the fast phase is for re- age of onset, etiology, waveform and other characteristics. -

Assessing Ocular Activity During Performance of Motor Skills Using Electrooculography Gallicchio, Germano; Cooke, Andrew; Ring, Christopher
University of Birmingham Assessing ocular activity during performance of motor skills using electrooculography Gallicchio, Germano; Cooke, Andrew; Ring, Christopher DOI: 10.1111/psyp.13070 License: Creative Commons: Attribution (CC BY) Document Version Publisher's PDF, also known as Version of record Citation for published version (Harvard): Gallicchio, G, Cooke, A & Ring, C 2018, 'Assessing ocular activity during performance of motor skills using electrooculography', Psychophysiology. https://doi.org/10.1111/psyp.13070 Link to publication on Research at Birmingham portal General rights Unless a licence is specified above, all rights (including copyright and moral rights) in this document are retained by the authors and/or the copyright holders. The express permission of the copyright holder must be obtained for any use of this material other than for purposes permitted by law. •Users may freely distribute the URL that is used to identify this publication. •Users may download and/or print one copy of the publication from the University of Birmingham research portal for the purpose of private study or non-commercial research. •User may use extracts from the document in line with the concept of ‘fair dealing’ under the Copyright, Designs and Patents Act 1988 (?) •Users may not further distribute the material nor use it for the purposes of commercial gain. Where a licence is displayed above, please note the terms and conditions of the licence govern your use of this document. When citing, please reference the published version. Take down policy While the University of Birmingham exercises care and attention in making items available there are rare occasions when an item has been uploaded in error or has been deemed to be commercially or otherwise sensitive. -
Eye Care Documentation Template Documentation Tem- Plate: Conceptual Structure
Eye Care Documentation Template Documentation Tem- plate: Conceptual Structure Contract: VA118-16-D-1008, Task Order (TO): VA-118-16-F-1008-0007, CLIN0009DA Department of Veterans Affairs (VA) Knowledge Based Systems (KBS) Office of Informatics and Information Governance (OIIG) Clinical Decision Support (CDS) Publication date 06/23/2018 Version: 1.0 Eye Care Documentation Template: Documentation Template: Con- ceptual Structure by Knowledge Based Systems (KBS), Office of Informatics and Information Governance (OIIG), and Clinical Deci- sion Support (CDS) Publication date 06/23/2018 Copyright © 2018 B3 Group, Inc. Copyright © 2018 Cognitive Medical Systems, Inc. B3 Group, Inc. NOTICE OF GOVERNMENT COPYRIGHT LICENSE AND UNLIMITED RIGHTS LICENSE Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0 Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License. Portions of this content are derivative works from content produced by Cognitive Medical Systems, Inc. licensed under the Apache License, Version 2.0. Additional portions of this content are derivative works from content contributed by Motive Medical Intelligence Inc., under Creative Commons Attribution-ShareAlike 4.0. Contributions from 2013-2018 were performed either by US Government employees, or under US Veterans Health Administration contracts. US Veterans Health Administration contributions by government employees are work of the U.S. -

Electrooculography”
ISSN (Print) : 2319-5940 ISSN (Online) : 2278-1021 International Journal of Advanced Research in Computer and Communication Engineering Vol. 2, Issue 11, November 2013 An Overview of “Electrooculography” Uzma Siddiqui1, A.N Shaikh2 EC Department, Savitribai Phule Women’s Engineering College, Aurangabad MH, India 1 EC Department, Savitribai Phule Women’s Engineering College, Aurangabad MH, India 2 Abstract: This paper brings out a new technology of placing electrodes on user’s forehead around the eyes to record eye movements which is called as Electrooculography (EOG. This technology is based on the principle of recording the polarization potential or corneal-retinal potential (CRP), which is the resting potential between the cornea and the retina. This potential is commonly known as electrooculogram. is a very small electrical potential that can be detected using electrodes which is linearly proportional to eye displacement. EOG serves as a means of control for allowing the handicapped, especially those with only eye-motor coordination, to live more independent lives. This is a low cost assistive system for disabled people. The total command control based on EOG permits users to guide it with a enough degree of comfort ability. Keywords:AnalogDigitalConverter(ADC),Electroencefalogram(EEG),Electromyalgy(EMG),Electrooculography (EOG), Rapid Eye Movement(REM),Slow eye movement(SEM). I. INTRODUCTION Electrooculography is a technique for measuring the resting potential of the retina. The resulting signal is called the electrooculogram. An electrooculograph is a device that measures the voltage between two electrodes placed on the face of a subject so it can detect eye movement. Today the use of computers is extended to every field. -

Eye Movement Analysis for Activity Recognition Using Electrooculography
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, - PREPRINT - 1 Eye Movement Analysis for Activity Recognition Using Electrooculography Andreas Bulling, Student Member, IEEE, Jamie A. Ward, Hans Gellersen, and Gerhard Troster,¨ Senior Member, IEEE Abstract—In this work we investigate eye movement analysis as a new sensing modality for activity recognition. Eye movement data was recorded using an electrooculography (EOG) system. We first describe and evaluate algorithms for detecting three eye movement characteristics from EOG signals - saccades, fixations, and blinks - and propose a method for assessing repetitive patterns of eye movements. We then devise 90 different features based on these characteristics and select a subset of them using minimum redundancy maximum relevance feature selection (mRMR). We validate the method using an eight participant study in an office environment using an example set of five activity classes: copying a text, reading a printed paper, taking hand-written notes, watching a video, and browsing the web. We also include periods with no specific activity (the NULL class). Using a support vector machine (SVM) classifier and person-independent (leave-one-person-out) training, we obtain an average precision of 76.1% and recall of 70.5% over all classes and participants. The work demonstrates the promise of eye-based activity recognition (EAR) and opens up discussion on the wider applicability of EAR to other activities that are difficult, or even impossible, to detect using common sensing modalities. Index Terms—Ubiquitous computing, Feature evaluation and selection, Pattern analysis, Signal processing. F 1 INTRODUCTION ties have the potential to reveal much about the activities themselves - independently of what we are looking at. -
Role of Signal Processing in Eye Care a Collaboration Between the Department of Ophthalmology and the Biomedical Engineering
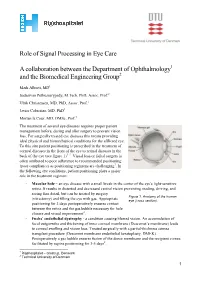
Role of Signal Processing in Eye Care A collaboration between the Department of Ophthalmology1 and the Biomedical Engineering Group2 Mark Alberti, MD1 Sadasivan Puthusserypady, M.Tech, PhD, Assoc. Prof.2 Ulrik Christensen, MD, PhD, Assoc. Prof.1 Javier Cabrerizo, MD, PhD1 Morten la Cour, MD, DMSc, Prof.1 The treatment of several eye diseases requires proper patient management before, during and after surgery to prevent vision loss. For surgically treated eye diseases this means providing ideal physical and biomechanical conditions for the afflicted eye. To this aim patient positioning is prescribed in the treatment of corneal diseases in the front of the eye to retinal diseases in the back of the eye (see figure 1)1, 2. Visual loss or failed surgery is often attributed to poor adherence to recommended positioning (poor compliance) as positioning regimens are challenging3. In the following eye conditions, patient positioning plays a major role in the treatment regimen: - Macular hole – an eye disease with a small break in the center of the eye's light-sensitive retina. It results in distorted and decreased central vision preventing reading, driving, and seeing fine detail, but can be treated by surgery Figure 1. Anatomy of the human (vitrectomy) and filling the eye with gas. Appropriate eye (cross section). positioning for 3 days postoperatively ensures contact between the retina and the gas bubble necessary for hole closure and visual improvement4. - Fuchs’ endothelial dystrophy - a condition causing blurred vision. An accumulation of focal outgrowths and thickening of inner corneal membrane (Descemet’s membrane) leads to corneal swelling and vision loss. -

Photopotentiation of Ganglion Cell Photoreceptors and Pupillary Light Responses
Photopotentiation of Ganglion Cell Photoreceptors and Pupillary Light Responses Dissertation Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Phillip Thomas Yuhas, O.D. M.S. Graduate Program in Vision Science The Ohio State University 2019 Dissertation Committee: Dr. Andrew Hartwick, Advisor Dr. Angela Brown Dr. Dean VanNasdale Dr. Jordan Renna Copyright by Phillip Thomas Yuhas 2019 i Abstract A rare subset of intrinsically photosensitive retinal ganglion cells (ipRGCs) contain the photopigment melanopsin that enables them to capture light and signal downstream targets independently from rods and cones. These blue-light sensitive, sluggish neurons act as irradiance detectors, signaling environmental light levels to brain centers that control aspects of non-image-forming vision, including the pupillary light response. Under physiological conditions, these cells are not isolated from external modulators. The overall objective of this dissertation was to quantify how ipRGC function can be influenced by retinal neuromodulators and then explore conditions in vivo in which ipRGC modulation may occur or be altered. First, multielectrode array recordings were obtained from rat retinas in vitro to determine whether dopamine D1 receptor agonists and antagonists affect light-evoked spiking in RGCs, including ipRGCs. The D1 receptor agonist, SKF 38393, significantly increased the spiking of synaptically intact ipRGCs and ON RGCs in response to a bright, flickering blue light, compared to baseline. A delayed SKF 38393-mediated enhancement was observed for ipRGCs that were pharmacologically isolated from glutamatergic input. Exposure to a D1 receptor antagonist, SCH 23390, did not significantly alter light-evoked spiking in pharmacologically isolated ipRGCs. -
Visual Acuity
Diagnostic Procedures in OPHTHALMOLOGY Diagnostic Procedures in OPHTHALMOLOGY SECOND EDITION HV Nema Former Professor and Head Department of Ophthalmology Institute of Medical Sciences Banaras Hindu University Varanasi, Uttar Pradesh, India Nitin Nema MS Dip NB Assistant Professor Department of Ophthalmology Sri Aurobindo Institute of Medical Sciences Indore, Madhya Pradesh, India ® JAYPEE BROTHERS MEDICAL PUBLISHERS (P) LTD New Delhi • Ahmedabad • Bengaluru • Chennai • Hyderabad Kochi • Kolkata • Lucknow • Mumbai • Nagpur • St Louis (USA) Published by Jitendar P Vij Jaypee Brothers Medical Publishers (P) Ltd Corporate Office 4838/24 Ansari Road, Daryaganj, New Delhi - 110 002, India, +91-11-43574357 (30 lines) Registered Office B-3 EMCA House, 23/23B Ansari Road, Daryaganj, New Delhi 110 002, India Phones: +91-11-23272143, +91-11-23272703, +91-11-23282021, +91-11-23245672, Rel: +91-11-32558559 Fax: +91-11-23276490, +91-11-23245683 e-mail: [email protected], Website: www.jaypeebrothers.com Branches • 2/B, Akruti Society, Jodhpur Gam Road Satellite Ahmedabad 380 015 Phones: +91-79-26926233, Rel: +91-79-32988717 Fax: +91-79-26927094 e-mail: [email protected] • 202 Batavia Chambers, 8 Kumara Krupa Road, Kumara Park East Bengaluru 560 001 Phones: +91-80-22285971, +91-80-22382956, +91-80-22372664 Rel: +91-80-32714073, Fax: +91-80-22281761 e-mail: [email protected] • 282 IIIrd Floor, Khaleel Shirazi Estate, Fountain Plaza, Pantheon Road Chennai 600 008 Phones: +91-44-28193265, +91-44-28194897, Rel: +91-44-32972089 Fax: +91-44-28193231 e-mail: [email protected] • 4-2-1067/1-3, 1st Floor, Balaji Building, Ramkote Cross Road Hyderabad 500 095 Phones: +91-40-66610020, +91-40-24758498, Rel:+91-40-32940929 Fax:+91-40-24758499 e-mail: [email protected] • No. -

Electrooculographic and Electroretinographic Changes
Original Article Electrooculographic and Electroretinographic Changes among Patients Undergoing Treatment with Amiodarone Fatemeh Tajik 1, MD; Seyed Mohammad Masoud Shushtarian *2, PhD 1. Department of Ophthalmology, Faculty of Medicine, Tehran Medical Sciences, Islamic Azad University, Tehran, Iran. 2. Department of Biophysics and Biochemistry, Faculty of Advance Science and Technology, Tehran Medical Sciences, Islamic Azad University, Tehran, Iran. *Corresponding Author: Seyed Mohammad Masoud Shushtarian E-mail: [email protected] Article Notes: Abstract Received: May. 20, 2018 Purpose: To evaluate the probable toxic effects of amiodarone on Received in revised form: Jul. retina, using electrooculography (EOG) and electroretinography (ERG) testing methods. 19, 2018 Patients and Methods: Fifty participants in the present study Accepted: Aug. 11, 2018 included 25 patients with a history of amiodarone treatment as Available Online: Sep. 25, the case group and 25 age, sex and visual acuity matched healthy 2018 volunteers with healthy visual system as the control group. All the participants underwent EOG and ERG examinations on their both ------------------------------------- eyes. The results obtained in two groups were compared to look Keywords: for possible changes among patients undergoing treatment with amiodarone compared to the control group. Amiodarone Results: There was no statistically significant difference between Retina the case and control groups regarding the age, sex, and visual acuity. Out of 50 eyes in the case group 9 eyes showed abnormal Electrooculography ERG including 7 eyes showing abnormal b-wave peak latency Electroretinography and 5 eyes showing abnormal b-wave peak amplitude. Three eyes had both abnormal latency and amplitude. In comparison, only one eye in the control group showed abnormal latency. -

Cigna Medical Coverage Policies – Sleep Disorders Diagnosis & Treatment Guidelines
Cigna Medical Coverage Policies – Sleep Disorders Diagnosis & Treatment Guidelines Effective February 1, 2021 ____________________________________________________________________________________ Instructions for use The following coverage policy applies to health benefit plans administered by Cigna. Coverage policies are intended to provide guidance in interpreting certain standard Cigna benefit plans and are used by medical directors and other health care professionals in making medical necessity and other coverage determinations. Please note the terms of a customer’s particular benefit plan document may differ significantly from the standard benefit plans upon which these coverage policies are based. For example, a customer’s benefit plan document may contain a specific exclusion related to a topic addressed in a coverage policy. In the event of a conflict, a customer’s benefit plan document always supersedes the information in the coverage policy. In the absence of federal or state coverage mandates, benefits are ultimately determined by the terms of the applicable benefit plan document. Coverage determinations in each specific instance require consideration of: 1. The terms of the applicable benefit plan document in effect on the date of service 2. Any applicable laws and regulations 3. Any relevant collateral source materials including coverage policies 4. The specific facts of the particular situation Coverage policies relate exclusively to the administration of health benefit plans. Coverage policies are not recommendations for treatment and should never be used as treatment guidelines. This evidence-based medical coverage policy has been developed by eviCore, Inc. Some information in this coverage policy may not apply to all benefit plans administered by Cigna. These guidelines include procedures eviCore does not review for Cigna. -

Tracking the Closed Eye by Calibrating Electrooculography with Pupil-Corneal Reflection
TRACKING THE CLOSED EYE BY CALIBRATING ELECTROOCULOGRAPHY WITH PUPIL-CORNEAL REFLECTION by Raymond R. MacNeil B.Sc., University of Toronto, 2016 A THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ARTS in THE FACULTY OF GRADUATE AND POSTDOCTORAL STUDIES (Psychology) THE UNIVERSITY OF BRITISH COLUMBIA (Vancouver) August 2020 © Raymond R. MacNeil, 2020 The following individuals certify that they have read, and recommend to the Faculty of Graduate and Postdoctoral Studies for acceptance, the thesis entitled: TRACKING THE CLOSED EYE BY CALIBRATING ELECTROOCULOGRAPHY WITH PUPIL-CORNEAL REFLECTION submitted by Raymond R. MacNeil in partial fulfillment of the requirements for the degree of Master of Arts in Psychology Examining Committee: Dr. James T. Enns (Psychology, Faculty of Arts) Supervisor Dr. Ipek Oruc (Ophthalmology and Visual Sciences, Faculty of Medicine) Supervisory Committee Member Dr. Peter Graf (Department of Psychology, Faculty of Arts) Supervisory Committee Member ii Abstract Electrooculography (EOG) offers several advantages over other methods for tracking human eye movements, including its low cost and capability of monitoring gaze position when the eyelids are closed. Yet, EOG poses its own challenges, because in order to determine saccadic distance and direction, the electrical potentials measured by EOG must be calibrated in some way with physical distance. Moreover, the EOG signal is highly susceptible to noise and artifacts arising from a variety of sources (e.g., activity of the extraocular muscles). Here we describe a method for estimating a corrected EOG signal by simultaneously tracking gaze position with an industry standard pupil-corneal reflection (PCR) system. We first compared the two measurements with the eyes open under two conditions of full illumination and in a third condition of complete darkness.