Digital Transmission
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Digital Transmission 01204325 Data Communications and Computer Networks
Digital Transmission 01204325 Data Communications and Computer Networks Chaiporn Jaikaeo Department of Computer Engineering Kasetsart University Based on lecture materials from Data Communications and Networking, 5th ed., Behrouz A. Forouzan, McGraw Hill, 2012. Revised 2021-05-07 Outline • Line coding • Encoding considerations • DC components in signals • Synchronization • Various line coding methods • Analog to digital conversion 2 Line Coding • Process of converting binary data to digital signal 3 Signal vs. Data Elements 1 data element = 1 symbol 4 Encoding Considerations • Signal spectrum ◦ Lack of DC components ◦ Lack of high frequency components • Clocking/synchronization • Error detection • Noise immunity • Cost and complexity 5 DC Components • DC components in signals are not desirable ◦ Cannot pass thru certain devices ◦ Leave extra (useless) energy on the line ◦ Voltage built up due to stray capacitance in long cables v Signal with t DC component v Signal without t DC component 6 Synchronization • To correctly decode a signal, receiver and sender must agree on bit interval 0 1 0 0 1 1 0 1 Sender sends: v 01001101 t 0 1 0 0 0 1 1 0 1 1 Receiver sees: v 0100011011 t 7 Providing Synchronization • Separate clock wire Sender data Receiver clock • Self-synchronization 0 1 0 0 1 1 0 1 v t 8 Line Coding Methods • Unipolar ◦ Uses only one voltage level (one side of time axis) • Polar ◦ Uses two voltage levels (negative and positive) ◦ E.g., NRZ, RZ, Manchester, Differential Manchester • Bipolar ◦ Uses three voltage levels (+, 0, and -

An Efficient Utilization of Power Spectrum Density for Smart Cities
sensors Article Moving towards IoT Based Digital Communication: An Efficient Utilization of Power Spectrum Density for Smart Cities Tariq Ali 1,*, Abdullah S. Alwadie 1, Abdul Rasheed Rizwan 2, Ahthasham Sajid 3 , Muhammad Irfan 1 and Muhammad Awais 4 1 Electrical Engineering Department, College of Engineering, Najran University, Najran 61441, Saudi Arabia; [email protected] (A.S.A.); [email protected] (M.I.) 2 Department of Computer Science, Punjab Education System, Depaalpur 56180, Pakistan; [email protected] 3 Department of Computer Science, Faculty of ICT, Balochistan University of Information Technology Engineering and Management Sciences, Quetta 87300, Pakistan; [email protected] 4 School of Computing and Communications, Lancaster University, Bailrigg, Lancaster LA1 4YW, UK; [email protected] * Correspondence: [email protected] Received: 8 April 2020; Accepted: 14 May 2020; Published: 18 May 2020 Abstract: The future of the Internet of Things (IoT) is interlinked with digital communication in smart cities. The digital signal power spectrum of smart IoT devices is greatly needed to provide communication support. The line codes play a significant role in data bit transmission in digital communication. The existing line-coding techniques are designed for traditional computing network technology and power spectrum density to translate data bits into a signal using various line code waveforms. The existing line-code techniques have multiple kinds of issues, such as the utilization of bandwidth, connection synchronization (CS), the direct current (DC) component, and power spectrum density (PSD). These highlighted issues are not adequate in IoT devices in smart cities due to their small size. -

4.1 DIGITAL-TO-DIGITAL CONVERSION in Chapter 3, We Discussed Data and Signals
A computer network is designed to send information from one point to another. This information needs to be converted to either a digital signal or an analog signal for trans• mission. In this chapter, we discuss the first choice, conversion to digital signals; in Chapter 5, we discuss the second choice, conversion to analog signals. We discussed the advantages and disadvantages of digital transmission over analog transmission in Chapter 3. In this chapter, we show the schemes and techniques that we use to transmit data digitally. First, we discuss digital-to-digital conversion tech• niques, methods which convert digital data to digital signals. Second, we discuss analog- to-digital conversion techniques, methods which change an analog signal to a digital signal. Finally, we discuss transmission modes. 4.1 DIGITAL-TO-DIGITAL CONVERSION In Chapter 3, we discussed data and signals. We said that data can be either digital or analog. We also said that signals that represent data can also be digital or analog. In this section, we see how we can represent digital data by using digital signals. The conver• sion involves three techniques: line coding, block coding, and scrambling. Line coding is always needed; block coding and scrambling may or may not be needed. Line Coding Line coding is the process of converting digital data to digital signals. We assume that data, in the form of text, numbers, graphical images, audio, or video, are stored in com• puter memory as sequences of bits (see Chapter 1). Line coding converts a sequence of bits to a digital signal. At the sender, digital data are encoded into a digital signal; at the receiver, the digital data are recreated by decoding the digital signal. -
UNIT: 3 Digital and Analog Transmission
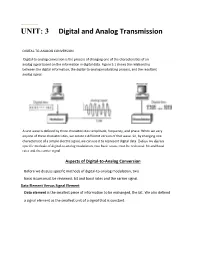
UNIT: 3 Digital and Analog Transmission DIGITAL-TO-ANALOG CONVERSION Digital-to-analog conversion is the process of changing one of the characteristics of an analog signal based on the information in digital data. Figure 5.1 shows the relationship between the digital information, the digital-to-analog modulating process, and the resultant analog signal. A sine wave is defined by three characteristics: amplitude, frequency, and phase. When we vary anyone of these characteristics, we create a different version of that wave. So, by changing one characteristic of a simple electric signal, we can use it to represent digital data. Before we discuss specific methods of digital-to-analog modulation, two basic issues must be reviewed: bit and baud rates and the carrier signal. Aspects of Digital-to-Analog Conversion Before we discuss specific methods of digital-to-analog modulation, two basic issues must be reviewed: bit and baud rates and the carrier signal. Data Element Versus Signal Element Data element is the smallest piece of information to be exchanged, the bit. We also defined a signal element as the smallest unit of a signal that is constant. Data Rate Versus Signal Rate We can define the data rate (bit rate) and the signal rate (baud rate). The relationship between them is S= N/r baud where N is the data rate (bps) and r is the number of data elements carried in one signal element. The value of r in analog transmission is r =log2 L, where L is the type of signal element, not the level. Carrier Signal In analog transmission, the sending device produces a high-frequency signal that acts as a base for the information signal. -

Design of Return to Zero (RZ) Bipolar Digital to Digital Encoding Data Transmission
IOSR Journal of Engineering (IOSRJEN) www.iosrjen.org ISSN (e): 2250-3021, ISSN (p): 2278-8719 Vol. 05, Issue 02 (February. 2015), ||V4|| PP 33-36 Design of Return to Zero (RZ) Bipolar Digital to Digital Encoding Data Transmission Amna mohammed Elzain1,Abdelrasoul Jabar Alzubaidi2 Alazhery University- Engineering college Sudan University of Science and technology –Engineering College- Electronics Engineering School Abstract: - Line encoding is the method used to represent the digital information on the media. A pattern, that uses either voltage or current, is used to represent the 1s and 0s of the digital signal on the transmission link. Common types of line encoding methods used in data communications are: Unipolar line encoding, Polar line encoding, Bipolar line encoding and Manchester line encoding. This paper deals with the design of bipolar digital to digital encoding (RZ) data transmission using latch SN 74373, darlington amplifier ULN 2003-500 m A, solid state relay, personnel computer and Turbo C++ programming language ). Keywords: - Bipolar, Encoding, Digital to Digital, Latch SN 74373, Darlington Amplifier ULN 2003-500 m A, Solid State Relay (SSR) ,Turbo C++ , Computer. I. INTRODUCTION A computer network is used for communication of data from one station to another station in the network [1]. Data and signals are two of the basic building blocks of any computer network. Data must be encoded into signals before it can be transported across communication media [2]. Encoding means conversion of data into bit stream [3]. There are different encoding schemes available: Analog-to-Digital Digital-to-Analog Analog-to-Analog Digital-to-Digital Digital-to-Digital Digital-to-Digital encoding is the representation of digital information by a digital signal . -

M-Ary Aggregate Spread Pulse Modulation in Lpwans for Iot Applications
M-ary Aggregate Spread Pulse Modulation in LPWANs for IoT applications Alexei V. Nikitin Ruslan L. Davidchack Nonlinear LLC Sch. of Mathematics and Actuarial Sci., Wamego, Kansas, USA U. of Leicester, Leicester, UK E-mail: [email protected] E-mail: [email protected] Abstract—In low-power wide-area networks (LPWANs), various However, the designed pulse train Gˆ»:¼ given by (1) can be trade-offs among the bandwidth, data rates, and energy per bit “re-shaped” by linear filtering: have different effects on the quality of service under different ∑︁ propagation conditions (e.g. fading and multipath), interference G »:¼ = ¹Gˆ ∗ 6ˆº»:¼ = 퐴9 6ˆ»: −:9 ¼ , (3) scenarios, multi-user requirements, and design constraints. Such 9 compromises, and the manner in which they are implemented, fur- where 6ˆ»:¼ is the impulse response of the filter and the asterisk ther affect other technical aspects, such as system’s computational denotes convolution. The filter 6ˆ»:¼ can be, for example, a complexity and power efficiency. At the same time, this difference lowpass filter with a given bandwidth 퐵. If the filter 6ˆ»:¼ has a in trade-offs also adds to the technical flexibility in addressing a broader range of IoT applications. This paper addresses a sufficiently large time-bandwidth product (TBP) [4], [5], most of physical layer LPWAN approach based on the Aggregate Spread the samples in the reshaped train G »:¼ will have non-zero values, Pulse Modulation (ASPM) and provides a brief assessment of its and G »:¼ will have a much smaller PAPR than the designed properties in additive white Gaussian noise (AWGN) channel. -
Digital Transmission Channels
ORDER 6000.47 I J MAINTEN/om!, OF DIGITAL TRANSMISSION CHANNELS October 18, 1993 U.S. DEPARTMENT OF TRANSPORTATION FEDERAL AVIATION ADMINISTRATION Distribution: A-FAF-0(MAX); X(AF)-3;ZAF-604 Initiated By: AOS-240 6000.47 FOREWORD 1. PURPOSE. This handbook provides guidance and and used together by the maintenance technician in all prescribes technical standards and tolerances, and duties and activities for the maintenance of digital procedures applicable to the maintenance and inspec- lines. The three documents shall be used collectively tion of digital transmission channels. This handbook as the official source of maintenance policy and provides operating and maintenance requirements for direction authorized by the Operational Support specific services that provide digital transmission Service. References in this handbook shall indicate to channels, such as the leased interfacility National the user whether this handbook and/or the equipment Airspace System (NAS) communications system instruction book shalI be consulted for a particular (LINCS) . It also provides information on special standard, key inspection element or performance methods and techniques which will enable maintenance parameter, performance check, maintenance task, or personnel to achieve optimum performance from the maintenance procedure. equipment and transmission services. This information augments information available in instruction books b. The latest edition of Order 6032.1, Modifications and other handbooks, and complements the latest to Ground Facilities, Systems, and Equipment in the edition of Order 6000.15, General Maintenance National Airspace System, contains comprehensive Handbook for Airway Facilities. policy and direction concerning the development, authorization, implementation, and recording of modifications to facilities, systems, and equipment in 2. -
Chapter 4 Digital Transmission
Chapter 4 Digital Transmission Digital-to-Digital Conversion Analog-to-Digital Conversion Transmission Modes Wireless System Lab, NCNU 1 Digital Transmission Before transmission, information is converted to Digital signal Analog signal Chapter 3 discusses advantages of digital transmission over analog transmission. Techniques used to transmit data digitally Digital-to-digital conversion. Analog-to-digital conversion. Transmission modes of data transmission. Wireless System Lab, NCNU 2 Digital Transmission Before transmission, information is converted to Digital signal Analog signal Chapter 3 discusses advantages of digital transmission over analog transmission. Techniques used to transmit data digitally Digital-to-digital conversion. Analog-to-digital conversion. Transmission modes of data transmission. Wireless System Lab, NCNU 3 Chapter 4 Digital Transmission Digital-to-Digital Conversion Wireless System Lab, NCNU 4 Digital-to-Digital Conversion How to represent digital data (0101011 bit stream) by using digital signals. Three techniques: Line coding Block coding Scrambling Line coding is always needed; block coding and scrambling may or may not be needed. Wireless System Lab, NCNU 5 Line Coding and Decoding Digital data: text, numbers, images, audio, or video, are converted as bit stream. Sender encodes digital data into digital signal. Receiver decodes the digital signal to digital data. Line coding maps binary information sequence into digital signal. (絞肉機) Ex: “1” mapped to +A square pulse; “0” to –A pulse Wireless System Lab, NCNU 6 Signal Element versus Data Element Data element The smallest entity that can represent a piece of information: this is bit. Signal element The shortest unit (timewise) of a digital signal. In other words Data element are what we need to send. -

Notes-Data-Communication-Unit-02
1 UNIT–02 UNIT-02/LECTURE-01 Data Transmission: Data transmission, digital transmission, or digital communications is the physical transfer of data over a point-to-point or point-to-multipoint communication channel. Examples of such channels are copper wires, optical fibres, wireless communication channels, storage media and computer buses. The data are represented as an electromagnetic signal, such as an electrical voltage, radiowave, microwave, or infrared signal. While analog transmission is the transfer of a continuously varying analog signal, digital communications is the transfer of discrete messages. The messages are either represented by a sequence of pulses by means of a line code (baseband transmission), or by a limited set of continuously varying wave forms (passband transmission), using a digital modulation method. The passband modulation and corresponding demodulation (also known as detection) is carried out by modem equipment. According to the most common definition of digital signal, both baseband and passband signals representing bit-streams are considered as digital transmission, while an alternative definition only considers the baseband signal as digital, and passband transmission of digital data as a form of digital-to-analog conversion. Data transmitted may be digital messages originating from a data source, for example a computer or a keyboard. It may also be an analog signal such as a phone call or a video signal, digitized into a bit-stream for example using pulse-code modulation (PCM) or more advanced source coding schemes. This source coding and decoding is carried out by codec equipment. When we enter data into the computer via keyboard, each keyed element is encoded by the electronics within the keyboard into an equivalent binary coded pattern, using one of the standard coding schemes that are used for the interchange of information. -
Chapter 4 Digital Transmission
Chapter 4 Digital Transmission 4.1 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. 4-1 DIGITAL-TO-DIGITAL CONVERSION In this section, we see how we can represent digital data by using digital signals. The conversion involves three techniques: line coding, block coding, and scrambling. Line coding is always needed; block coding and scrambling may or may not be needed. Topics discussed in this section: Line Coding Line Coding Schemes Block Coding Scrambling 4.2 Line Coding Line coding is the process of converting digital data to digital signals At the sender, data elements are encoded into signal elements At the receiver, signal elements are decoded into data elements 4.3 Figure 4.1 Line coding and decoding 4.4 Characteristics of line coding Data Element vs. Signal Element Data Rate vs. Signal Rate Bandwidth Baseline Wandering DC Components Self-Synchronization Built-in Error Detection Immunity to noise and interference Complexity 4.5 Signal Elements vs. Data Elements A data element is the smallest entity that can represent a piece of information (a bit) A signal element is the shortest unit in time of a digital signal (a baud) Data elements are what we need to send Signals elements are what we can send The ratio, r, is defined as the number of data elements carried by each signal element 4.6 Figure 4.2 Signal element versus data element 4.7 Data Rate vs. Signal Rate The data rate (or bit rate), N, is the number of data elements (bits) sent in one second The signal rate (or baud rate or pulse rate or modulation rate), S, is the number of signal elements (bauds) sent in one second The goal is to increase the data rate (and hence the speed of transmission) while decreasing the signal rate (and hence the required bandwidth) Where c is the case factor that depends on the case 4.8 Example 4.1 A signal is carrying data in which one data element is encoded as one signal element (r = 1). -

3Rd Slide Set Computer Networks
Devices of the Physical Layer Encoding Data with Line Codes 3rd Slide Set Computer Networks Prof. Dr. Christian Baun Frankfurt University of Applied Sciences (1971–2014: Fachhochschule Frankfurt am Main) Faculty of Computer Science and Engineering [email protected] Prof. Dr. Christian Baun – 3rd Slide Set Computer Networks – Frankfurt University of Applied Sciences – WS1819 1/41 Devices of the Physical Layer Encoding Data with Line Codes Learning Objectives of this Slide Set Physical layer (part 2) Devices of the Physical Layer Repeaters and Hubs Impact on the collision domain Encoding data with line codes Non-Return-To-Zero (NRZ) Non-Return-To-Zero, Inverted (NRZI) Multilevel Transmission Encoding - 3 Levels (MLT-3) Return-to-zero (RZ) Unipolar RZ encoding Alternate Mark Inversion (AMI code) = Bipolar encoding B8ZS Manchester code Manchester II code Differential Manchester encoding 4B5B 6B6B 8B10B 8B6T Prof. Dr. Christian Baun – 3rd Slide Set Computer Networks – Frankfurt University of Applied Sciences – WS1819 2/41 Devices of the Physical Layer Encoding Data with Line Codes Physical Layer Functions of the Physical Layer Bit transmission on wired or wireless transmission paths Provides network technologies (e.g. Ethernet, WLAN,. ) Transmission Media Frames from the Data Link Layer are encoded with line codes into signals Devices: Repeater, Hub (Multiport Repeater) Protocols: Ethernet, Token Ring, WLAN, Bluetooth,. Prof. Dr. Christian Baun – 3rd Slide Set Computer Networks – Frankfurt University of Applied Sciences – WS1819 3/41 Devices of the Physical Layer Encoding Data with Line Codes Repeater Image Source: StarTech Because for all transmission media, the problem of attenuation (signal weakening) exists, the maximum range is limited Repeaters increase the range of a LAN by amplifying received electrical or optical signals and cleaning them from the noise and from Jitter Jitter = deviation of the transmission timing Repeaters just forward signals They do not analyze their meaning or correctness Repeaters have only 2 interfaces (ports) Prof. -
Manchester Coding and Decoding Generation Theortical and Expermental Design
American Scientific Research Journal for Engineering, Technology, and Sciences (ASRJETS) ISSN (Print) 2313-4410, ISSN (Online) 2313-4402 © Global Society of Scientific Research and Researchers http://asrjetsjournal.org/ Manchester Coding and Decoding Generation Theortical and Expermental Design Luma W Jameel* Al-Nisour University College/Department of Computer Technical Engineering/Baghdad-Iraq Second author Email: luma [email protected] Abstract This paper presents the implement and design of a line code Manchester coding and decoding theoretical and experimental designed system the experimental design was demonstrated in simulation using optics 7 , to observe the system performance with the present RZ & NRS line codes the main issue is to mixing RZ RNZ pulse coding in the XNOR gate ,so that the output of XNOR is the coding Manchester ,then mixing the coding Manchester with another RZ pulse generator in the another XNOR gate to obtain in the output Manchester decoding channel this is the procedure of our work. Keywords: XNOR; RZ; NRZ; optisys 7 and clock Bit rate. 1. Introduction A simple way was used in optical Communication set to mutate from Electrical to optical Binary Input Electrical Bit “1” was associated with a higher optical while bit “O” was associated to a lower optical intensity. Two styles are included in this modulation set: Non- return-to- zero (NRZ) and Return-to- zero (RZ) NRZ is the oldest and easier modulation style and obtain by switching a laser source between ON or OFF RZ term a line code applied in telecommunications signals in which the signal drops to zero between each pulse.