Bipolar Encoding Biphase Mark Code (Alternate Mark Inversion)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Shahabi-Adib-Masc-ECE-August
A New Line Code for a Digital Communication System by Adib Shahabi Submitted in partial fulfilment of the requirements for the degree of Master of Applied Science at Dalhousie University Halifax, Nova Scotia August 2019 © Copyright by Adib Shahabi, 2019 To my wife Shahideh ii TABLE OF CONTENTS LIST OF TABLES ............................................................................................................ v LIST OF FIGURES .......................................................................................................... vi ABSTRACT ....................................................................................................................viii LIST OF ABBREVIATIONS USED ............................................................................... ix ACKNOWLEDGEMENTS ............................................................................................... x CHAPTER 1 INTRODUCTION ....................................................................................... 1 1.1 BACKGROUND ........................................................................................... 1 1.2 THESIS SYNOPSIS ...................................................................................... 4 1.3 ORGANIZATION OF THE THESIS ............................................................ 5 CHAPTER 2 MODELLING THE LINE CHANNEL ....................................................... 7 2.1 CABLE MODELLING .................................................................................. 7 2.2 TRANSFORMER COUPLING .................................................................. -
Digital Transmission 01204325 Data Communications and Computer Networks
Digital Transmission 01204325 Data Communications and Computer Networks Chaiporn Jaikaeo Department of Computer Engineering Kasetsart University Based on lecture materials from Data Communications and Networking, 5th ed., Behrouz A. Forouzan, McGraw Hill, 2012. Revised 2021-05-07 Outline • Line coding • Encoding considerations • DC components in signals • Synchronization • Various line coding methods • Analog to digital conversion 2 Line Coding • Process of converting binary data to digital signal 3 Signal vs. Data Elements 1 data element = 1 symbol 4 Encoding Considerations • Signal spectrum ◦ Lack of DC components ◦ Lack of high frequency components • Clocking/synchronization • Error detection • Noise immunity • Cost and complexity 5 DC Components • DC components in signals are not desirable ◦ Cannot pass thru certain devices ◦ Leave extra (useless) energy on the line ◦ Voltage built up due to stray capacitance in long cables v Signal with t DC component v Signal without t DC component 6 Synchronization • To correctly decode a signal, receiver and sender must agree on bit interval 0 1 0 0 1 1 0 1 Sender sends: v 01001101 t 0 1 0 0 0 1 1 0 1 1 Receiver sees: v 0100011011 t 7 Providing Synchronization • Separate clock wire Sender data Receiver clock • Self-synchronization 0 1 0 0 1 1 0 1 v t 8 Line Coding Methods • Unipolar ◦ Uses only one voltage level (one side of time axis) • Polar ◦ Uses two voltage levels (negative and positive) ◦ E.g., NRZ, RZ, Manchester, Differential Manchester • Bipolar ◦ Uses three voltage levels (+, 0, and -

A Guide to Making RF Measurements for Signal Integrity Applications
White Paper A Guide to Making RF Measurements for Signal Integrity Applications Introduction Designing a system for Signal Integrity requires a great deal of knowledge and tremendous effort from all disciplines involved. Higher data rates and more complex modulation schemes are requiring digital engineers to take into account the analog and RF performance of the channels to a much greater degree than in the past. Moreover, increasing performance demands are requiring digital engineers move from oscilloscopes and TDRs to vector network analyzers (VNAs), with which they may be less familiar. Correspondingly, RF measurement groups within companies are being called on by their digital colleagues to help them with making VNA measurements. This paper is intended to review signal integrity-based VNA measurements for digital engineers and correlate VNA measurements to key signal integrity parameters for RF engineers. Contents The Driving Need for RF Measurements ...........................................................................................................3 Understanding Signal Integrity Terms and Measurements ...........................................................................4 Eye Diagrams .................................................................................................................................................4 Dispersion .......................................................................................................................................................4 High Frequency Loss /Attenuation -

Bit & Baud Rate
What’s The Difference Between Bit Rate And Baud Rate? Apr. 27, 2012 Lou Frenzel | Electronic Design Serial-data speed is usually stated in terms of bit rate. However, another oft- quoted measure of speed is baud rate. Though the two aren’t the same, similarities exist under some circumstances. This tutorial will make the difference clear. Table Of Contents Background Bit Rate Overhead Baud Rate Multilevel Modulation Why Multiple Bits Per Baud? Baud Rate Examples References Background Most data communications over networks occurs via serial-data transmission. Data bits transmit one at a time over some communications channel, such as a cable or a wireless path. Figure 1 typifies the digital-bit pattern from a computer or some other digital circuit. This data signal is often called the baseband signal. The data switches between two voltage levels, such as +3 V for a binary 1 and +0.2 V for a binary 0. Other binary levels are also used. In the non-return-to-zero (NRZ) format (Fig. 1, again), the signal never goes to zero as like that of return- to-zero (RZ) formatted signals. 1. Non-return to zero (NRZ) is the most common binary data format. Data rate is indicated in bits per second (bits/s). Bit Rate The speed of the data is expressed in bits per second (bits/s or bps). The data rate R is a function of the duration of the bit or bit time (TB) (Fig. 1, again): R = 1/TB Rate is also called channel capacity C. If the bit time is 10 ns, the data rate equals: R = 1/10 x 10–9 = 100 million bits/s This is usually expressed as 100 Mbits/s. -

Design and Performance Evaluation of QPSK Modulation And
International Conference on Applied Science and Engineering Innovation (ASEI 2015) Design and Performance Evaluation of QPSK Modulation and Demodulation in SS mode Based on Systemview Sheng LIANGa, Gaofeng PANb, Youxing WU, Yong XIEc China Satellite Maritime Tracking and Control Department, Jiangyin, Jiangsu, 214431,China a [email protected], b [email protected], c [email protected] Keywords: SS; QPSK; Eye Diagram. Abstract. Because the modulation and demodulation method in SS (Spread Spectrum) mode is different with sub-carrier TT&C system, so it is necessary to realize its performance evaluation based on software simulation. This paper makes use of Systemview to simulate the single target measurement in SS system and evaluate its anti-noise performance by eye diagram and BER. Results show the simulation model designed in this paper is feasible and Systemview can visualize abstract communication simulation. Introduction The present SS TT&C system has two kinds, which are coherent and non-coherent SS modes. In coherent mode, telecommand message is embedded in branch I of QPSK modulation after encoded with short PN code (period 210-1), distance measure message is embedded in branch Q after encoded with long PN code (period (210-1)×256) and the two branch signals with different powers compose UQPSK signal. In non-coherent mode, two branch messages encoded with short PN code are BPSK modulated respectively, which will be transmitted to the satellite after up-conversion and power amplification. This paper sets conditions to unitize the two modes and designs the modulation & demodulation simulation model based on Systemview to evaluate performance of SS mode. -

An Efficient Utilization of Power Spectrum Density for Smart Cities
sensors Article Moving towards IoT Based Digital Communication: An Efficient Utilization of Power Spectrum Density for Smart Cities Tariq Ali 1,*, Abdullah S. Alwadie 1, Abdul Rasheed Rizwan 2, Ahthasham Sajid 3 , Muhammad Irfan 1 and Muhammad Awais 4 1 Electrical Engineering Department, College of Engineering, Najran University, Najran 61441, Saudi Arabia; [email protected] (A.S.A.); [email protected] (M.I.) 2 Department of Computer Science, Punjab Education System, Depaalpur 56180, Pakistan; [email protected] 3 Department of Computer Science, Faculty of ICT, Balochistan University of Information Technology Engineering and Management Sciences, Quetta 87300, Pakistan; [email protected] 4 School of Computing and Communications, Lancaster University, Bailrigg, Lancaster LA1 4YW, UK; [email protected] * Correspondence: [email protected] Received: 8 April 2020; Accepted: 14 May 2020; Published: 18 May 2020 Abstract: The future of the Internet of Things (IoT) is interlinked with digital communication in smart cities. The digital signal power spectrum of smart IoT devices is greatly needed to provide communication support. The line codes play a significant role in data bit transmission in digital communication. The existing line-coding techniques are designed for traditional computing network technology and power spectrum density to translate data bits into a signal using various line code waveforms. The existing line-code techniques have multiple kinds of issues, such as the utilization of bandwidth, connection synchronization (CS), the direct current (DC) component, and power spectrum density (PSD). These highlighted issues are not adequate in IoT devices in smart cities due to their small size. -

The Trade-Off Between Transceiver Capacity and Symbol Rate
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by UCL Discovery The Trade-off Between Transceiver Capacity and Symbol Rate L. Galdino, D. Lavery, Z. Liu, K. Balakier, E. Sillekens, D. Elson, G. Saavedra, R. I. Killey and P. Bayvel Optical Networks Group, Dept. of Electronic & Electrical Engineering, University College London, UK [email protected] Abstract: The achievable throughput using high symbol rate, high order QAM is investigated for the current generation of CMOS-based DAC/ADC. The optimum symbol rate and modula- tion format is found to be 80GBd DP-256QAM, with an 800Gb/s net data rate. OCIS codes: (060.0060) Fiber optics and optical communications; (060.2360) Fiber optics links and subsystems 1. Introduction A key goal when designing a new optical transmission system is to increase the amount of data sent for a given cost. One way to reduce the cost-per-bit is to increase the channel symbol rate, which will maximise the amount of information sent over one channel and reduce the number of transceivers for a given transmission bandwidth. Currently, the upper limit on the available signal-to-noise ratio (SNR), and therefore channel highest achievable information rate (AIR) in a coherent optical transmission system, in the absence of fiber nonlinearity, is bounded by the transceiver subsystems, such as digital-to-analog converter (DAC) and analog to digital converter (ADC). The SNR of an ideal DAC / ADC is defined by the number of bits (N) which sets the quantization noise floor of the device [1]. -

4.1 DIGITAL-TO-DIGITAL CONVERSION in Chapter 3, We Discussed Data and Signals
A computer network is designed to send information from one point to another. This information needs to be converted to either a digital signal or an analog signal for trans• mission. In this chapter, we discuss the first choice, conversion to digital signals; in Chapter 5, we discuss the second choice, conversion to analog signals. We discussed the advantages and disadvantages of digital transmission over analog transmission in Chapter 3. In this chapter, we show the schemes and techniques that we use to transmit data digitally. First, we discuss digital-to-digital conversion tech• niques, methods which convert digital data to digital signals. Second, we discuss analog- to-digital conversion techniques, methods which change an analog signal to a digital signal. Finally, we discuss transmission modes. 4.1 DIGITAL-TO-DIGITAL CONVERSION In Chapter 3, we discussed data and signals. We said that data can be either digital or analog. We also said that signals that represent data can also be digital or analog. In this section, we see how we can represent digital data by using digital signals. The conver• sion involves three techniques: line coding, block coding, and scrambling. Line coding is always needed; block coding and scrambling may or may not be needed. Line Coding Line coding is the process of converting digital data to digital signals. We assume that data, in the form of text, numbers, graphical images, audio, or video, are stored in com• puter memory as sequences of bits (see Chapter 1). Line coding converts a sequence of bits to a digital signal. At the sender, digital data are encoded into a digital signal; at the receiver, the digital data are recreated by decoding the digital signal. -
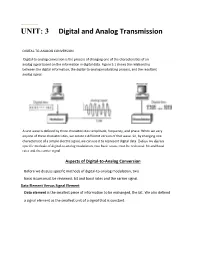
UNIT: 3 Digital and Analog Transmission
UNIT: 3 Digital and Analog Transmission DIGITAL-TO-ANALOG CONVERSION Digital-to-analog conversion is the process of changing one of the characteristics of an analog signal based on the information in digital data. Figure 5.1 shows the relationship between the digital information, the digital-to-analog modulating process, and the resultant analog signal. A sine wave is defined by three characteristics: amplitude, frequency, and phase. When we vary anyone of these characteristics, we create a different version of that wave. So, by changing one characteristic of a simple electric signal, we can use it to represent digital data. Before we discuss specific methods of digital-to-analog modulation, two basic issues must be reviewed: bit and baud rates and the carrier signal. Aspects of Digital-to-Analog Conversion Before we discuss specific methods of digital-to-analog modulation, two basic issues must be reviewed: bit and baud rates and the carrier signal. Data Element Versus Signal Element Data element is the smallest piece of information to be exchanged, the bit. We also defined a signal element as the smallest unit of a signal that is constant. Data Rate Versus Signal Rate We can define the data rate (bit rate) and the signal rate (baud rate). The relationship between them is S= N/r baud where N is the data rate (bps) and r is the number of data elements carried in one signal element. The value of r in analog transmission is r =log2 L, where L is the type of signal element, not the level. Carrier Signal In analog transmission, the sending device produces a high-frequency signal that acts as a base for the information signal. -

Digital Baseband Modulation Outline • Later Baseband & Bandpass Waveforms Baseband & Bandpass Waveforms, Modulation
Digital Baseband Modulation Outline • Later Baseband & Bandpass Waveforms Baseband & Bandpass Waveforms, Modulation A Communication System Dig. Baseband Modulators (Line Coders) • Sequence of bits are modulated into waveforms before transmission • à Digital transmission system consists of: • The modulator is based on: • The symbol mapper takes bits and converts them into symbols an) – this is done based on a given table • Pulse Shaping Filter generates the Gaussian pulse or waveform ready to be transmitted (Baseband signal) Waveform; Sampled at T Pulse Amplitude Modulation (PAM) Example: Binary PAM Example: Quaternary PAN PAM Randomness • Since the amplitude level is uniquely determined by k bits of random data it represents, the pulse amplitude during the nth symbol interval (an) is a discrete random variable • s(t) is a random process because pulse amplitudes {an} are discrete random variables assuming values from the set AM • The bit period Tb is the time required to send a single data bit • Rb = 1/ Tb is the equivalent bit rate of the system PAM T= Symbol period D= Symbol or pulse rate Example • Amplitude pulse modulation • If binary signaling & pulse rate is 9600 find bit rate • If quaternary signaling & pulse rate is 9600 find bit rate Example • Amplitude pulse modulation • If binary signaling & pulse rate is 9600 find bit rate M=2à k=1à bite rate Rb=1/Tb=k.D = 9600 • If quaternary signaling & pulse rate is 9600 find bit rate M=2à k=1à bite rate Rb=1/Tb=k.D = 9600 Binary Line Coding Techniques • Line coding - Mapping of binary information sequence into the digital signal that enters the baseband channel • Symbol mapping – Unipolar - Binary 1 is represented by +A volts pulse and binary 0 by no pulse during a bit period – Polar - Binary 1 is represented by +A volts pulse and binary 0 by –A volts pulse. -
AN-808 Long Transmission Lines and Data Signal Quality
Application Report SNLA028–May 2004 AN-808 Long Transmission Lines and Data Signal Quality ..................................................................................................................................................... ABSTRACT This application note explores another important transmission line characteristic, the reflection coefficient. This concept is combined with the material in AN-806 to present graphical and analytical methods for determining the voltages and currents at any point on a line with respect to distance and time. The effects of various source resistances and line termination methods on the transmitted signal are also discussed. This application note is a revised reprint of section four of the Fairchild Line Driver and Receiver Handbook. This application note, the third of a three part series (See AN-806 and AN-807), covers the following topics: Contents 1 Overview ..................................................................................................................... 3 2 Introduction .................................................................................................................. 3 3 Factors Causing Signal Wave Shape Changes ......................................................................... 4 4 Influence of Loss Effects on Primary Line Parameters ................................................................ 5 5 Variations in Z0, α(ω), and Propagation Velocity ........................................................................ 6 6 Signal Quality—Terms .................................................................................................... -
Creating Eye Diagrams Using Vectorstar Snp Files and AWR
Application Note Creating Eye Diagrams using VectorStar™ SnP files and AWR Microwave Office® MS4640B Series Vector Network Analyzer 1 Introduction As data rates and design complexity continues to increase, signal integrity becomes an integral part of the design and verification process. At first glance, one might assume that because digital signals are represented by discrete voltage (or current) levels, signal integrity may not be of major concern to digital designers. However, digital signals are fundamentally analog in nature, and all signals are subject to effects such as noise, distortion, and loss. Over short distances and at low bit rates, a simple conductor can transmit digital signals reliably without much distortion, but at high bit rates and over longer distances or through various media, various effects can degrade the electrical signal to the point where errors occur and the system or device fails. Today, it is common to see devices and systems operating at multi-GHz data rates. Digital signals being transmitted over relatively long transmission lines or through differing materials also present signal integrity challenges. Because of these challenges, a host of variables can affect the integrity of signals, including transmission-line effects, impedance mismatches, signal routing, termination schemes, and grounding schemes. One tool used to characterize these effects is the eye diagram. With eye diagrams, engineers can quickly evaluate system performance and gain insight into the nature of channel imperfections that can lead to errors when a receiver tries to interpret the value of a transmitted data bit. This application note reviews basic eye diagram definitions and terminologies. It will include a measurement example showing how to import a S-Paramater File of a device measured by an Anritsu VectorStar VNA into AWR’s Microwave Office application to generate an Eye Diagram.