California State University, Northridge a Digital
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Acoustic Design of Minimum Diffraction Coaxial Loudspeakers with Integrated Waveguides
Audio Engineering Society Convention Paper Presented at the 142nd Convention 2017 May 20–23 Berlin, Germany This Convention paper was selected based on a submitted abstract and 750-word precis that have been peer reviewed by at least two qualified anonymous reviewers. The complete manuscript was not peer reviewed. This convention paper has been reproduced from the author's advance manuscript without editing, corrections, or consideration by the Review Board. The AES takes no responsibility for the contents. This paper is available in the AES E-Library, http://www.aes.org/e-lib. All rights reserved. Reproduction of this paper, or any portion thereof, is not permitted without direct permission from the Journal of the Audio Engineering Society. The Acoustic Design of Minimum Diffraction Coaxial Loudspeakers with Integrated Waveguides Aki Mäkivirta, Jussi Väisänen, Ilpo Martikainen, Thomas Lund, Siamäk Naghian Genelec Oy, Iisalmi, Finland Correspondence should be addressed to Aki Mäkivirta ([email protected]) ABSTRACT Complementary to precision microphones, creating an ideal point source monitoring speaker has long been considered the holy grail of loudspeaker design. Coaxial transducers unfortunately typically come with several design compromises, such as adding intermodulation distortion, giving rise to various sources of diffraction, and resulting in somewhat restricted maximum output performance or frequency response. In this paper, we review the history of coaxial transducer design, considerations for an ideal point source loudspeaker, discuss the performance of a minimum diffraction coaxial loudspeaker and describe novel designs where the bottlenecks of conventional coaxial transducers have been eliminated. In these, the coaxial element also forms an integral part of a compact, continuous waveguide, thereby further facilitating smooth off-axis dispersion. -

Genelec AIW25 Active In-Wall Loudspeaker Operating Manual
Operating Manual AIW25 Genelec AIW25 Active In-Wall Loudspeaker Genelec AIW25 Active In-Wall Loudspeaker The Genelec AIW25 Active In-Wall loud- Installation This results in a precise and stable sound speaker system consists of a two-way image. loudspeaker enclosure and a matched Genelec recommends that you use the ser- If the AIW25 loudspeakers are used in an remote amplifier module, RAM2. It has been vices of an authorized installation special- application where their capability for precise designed to the same rigorous standards as ist or other competent and experienced sound imaging is needed, such as the front Genelec’s high-performance HT series active installation company for the installation of channels of a Surround Sound system or a Home Theater loudspeakers. No other in- the AIW25 system. Ask your local Genelec Stereo system, we recommend that the loud- wall loudspeaker in this size class can match dealer for recommended installation compa- speakers are placed as far away from cor- the low distortion, neutrality and high sound nies in your region. ners or other walls and reflective surfaces as pressure capability of Genelec AIW25. The possible. The loudspeakers should be placed AIW25 can be used in the most demanding Matching loudspeakers and symmetrically in relation to the listening posi- applications, like the main L-C-R array of a amplifiers tion and there should be no obstructions Home Theater system, critical Stereo listen- Each AIW25 loudspeaker has been factory between the loudspeaker and the listener. ing or rear/side channels of a medium sized, calibrated for optimum performance with the This guarantees clear dialogue in films and a state-of-the-art Home Theater. -
11.8 Loudspeaker Enclosures 11-71
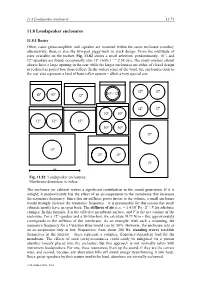
11.8 Loudspeaker enclosures 11-71 11.8 Loudspeaker enclosures 11.8.1 Basics Often, cases guitar-amplifier and -speaker are mounted within the same enclosure (combo); alternatively, there is also the two-part piggy-back or stack design. From the multitude of sizes available on the market, Fig. 11.82 shows a small selection: predominantly, 10”- and 12”-speakers are found, occasionally also 15” (with 1” = 2.54 cm). The small combos almost always have a large opening in the rear while the larger enclosures are either of closed design or realized as ported box (bass-reflex). In the widest sense of the word, the enclosures open to the rear also represent a kind of bass-reflex system – albeit a very special one. Fig. 11.82: Loudspeaker enclosures; Membrane-diameters in inches The enclosure (or cabinet) makes a significant contribution to the sound generation. If it is airtight, it predominantly has the effect of an air-suspension to the membrane that increases the resonance frequency. Since this air-stiffness grows invers to the volume, a small enclosure would strongly increase the resonance frequency – it is presumably for this reason that small 5 2 cabinets mostly have an open back. The stiffness of air is sL = 1.4⋅10 Pa ⋅ S / V for adiabatic changes. In this formula, S is the effective membrane surface, and V is the net volume of the enclosure. For a 12”-speaker and a 50-litre-box, we calculate 9179 N/m – this approximately corresponds to the stiffness of the membrane. As an example: with such a mounting, the resonance frequency for a Celestion Blue would rise by 50%. -

Mth-2.5/42Bt
ElectroVoice® MTH-2.5/42BT Manifold Technology® Mid-bass/High-Fre quency Sound Reinforce ment System • Sonically improved lower midrange • 40° x 20° constant-directivity pattern • Smaller MT trapezoidal enclosure • Rotatable MB & HF horns • High acoustic output, low distortion • Manifold Technology® enables smaller and lighter loudspeaker arrays • MT systems with different coverage patterns and output capabilities may be mixed and matched • Unique rigging scheme for flexible array design and quick assembly SHOWN WITHOUT GRILL • Available without rigging hardware SPECIFICATIONS Third Harmonic, MTH-2.5/42BT is an active, two-way, horn Frequency Response (measured in far 200 Hz: 0.8% loaded, 40° x 20° constant-directivity system field, calculated to one meter on axis, 1,000 Hz: 1.3% with a trapezoidal enclosure, utilizing two high swept sine wave, one watt into mid-bass 3,000 Hz: 0.1% power mid-bass drivers in the mid-bass fre section, anechoic environment; see 10,000 Hz: 1 .4% quency band and two high-power compression Figure 1): Transducer Complement, drivers in the high-frequency band . Both the 150-20,000 Hz MB: Two DL 1OX 10-inch drivers, mid-bass and high-frequency horns may be Recommended Crossover Frequencies: 40° x 40° fiberglass horn rotated in the enclosure. This configuration 160 Hz, 1,600 Hz HF: Two DH1A variant compression results in remarkably high acoustic output from Efficiency, MB/HF: drivers; HP42S, 40° x 20° horn a small enclosure. The MTH-2.5/42BT may be 16/25% Impedance (see Figures 2 & 7), combined with other members of the MT-2B Long-Term Average Power-Handling Nominal, MB/HF: and MT-4B loudspeaker family. -

Xlt41e-64 Two-Way Multi-Angle / Pa System with 60° X 40° Hf Horn
XLT41E-64 TWO-WAY MULTI-ANGLE / PA SYSTEM WITH 60° X 40° HF HORN SPECIFICATIONS (See notes 1 and 2) Loudspeaker Type: 2-way, multi-angle / PA, bass ported Operating Range: 70 Hz - 18 kHz 70 Hz - 18 kHz (+/-5dB) Max Input (Passive): 200W continuous, 500W program 14.4 in. 40 volts RMS, 89 volts momentary peak Recommended Power Amp: 366 mm 420W to 600W @ 8 Ohms Max Inputs (Biamp): LF: (Same as for Passive mode) Recommended LF Power Amp: (Same as for Passive mode) HF: 50W continuous, 125W program 20 volts RMS, 45 volts momentary peak APPLICATIONS: Recommended HF Power Amp: 100W to 150W @ 8 Ohms • Theatres / Auditoria Sensitivity 1W/1m: 99 dB SPL (70 Hz - 18 kHz 1/3 octave bands) • Portable PA 97 dB SPL (250 Hz - 4 kHz speech range) • Houses of Worship Maximum Output: 122 dB SPL / 129 dB SPL (peak) • Clubs Nominal Impedance (passive): 8 Ohms • Bands Min Impedance: 5.2 Ohms @ 210 Hz Nominal Impedances (Biamp): LF: 8 Ohms, HF: 8 Ohms FEATURES: Nominal -6 dB Beamwidth: • 1" Titanium HF Driver 55° H (+9° / -8°, 2 kHz - 10 kHz) 40° V (+1° / -5°, 2 kHz - 10 kHz) • Switchable Passive / Biamp Modes Axial Q / DI: • 2 Position HF Level Switch 33 / 15.2, 2 kHz - 10 kHz • PowerSenseTM DDP Circuit with Front Indication Crossover Frequency: 2 kHz • Dual-position Floor Monitor or Upright PA Use Recommended Signal Processing: 60 Hz high pass filter Drivers: • Steel Handle and Steel Input Panel LF (1) 12", Ferrofluid-cooled • Choice of Black, White, or Unfinished Exterior HF (1) 1" exit, titanium diaphragm Driver Protection: PowerSense™ DDP DESCRIPTION Input Connection: (2) Neutrik NL4MP, (2) 1/4 in.jack The XLT41E is a small and versatile two-way full-range Controls: Passive / Biamp switch bass reflex loudspeaker system engineered for multiple 2 position HF level switch uses in club and performance public address. -

Microphones and Loudspeakers
A Tutorial on Acoustical Transducers: Microphones and Loudspeakers Robert C. Maher Montana State University EELE 217 Science of Sound Spring 2012 Test Sound Outline • Introduction: What is sound? • Microphones – Principles – General types – Sensitivity versus Frequency and Direction • Loudspeakers – Principles – Enclosures • Conclusion 2 Transduction • Transduction means converting energy from one form to another • Acoustic transduction generally means converting sound energy into an electrical signal, or an electrical signal into sound • Microphones and loudspeakers are acoustic transducers 3 Acoustics and Psychoacoustics Mechanical Electrical to to Acoustical Acoustical Psychological Acoustical Mechanical propagation to (reflection, to diffraction, Mechanical Electrical absorption, etc.) (nerve signals) 4 What is Sound? • Vibration of air particles • A rapid fluctuation in air pressure above and below the normal atmospheric pressure • A wave phenomenon: we can observe the fluctuation as a function of time and as a function of spatial position 5 Sound (cont.) • Sound waves propagate through the air at approximately 343 meters per second – Or 1125 feet per second – Or 4.7 seconds per mile ≈ 5 seconds per mile – Or 13.5 inches per millisecond ≈ 1 foot per ms • The speed of sound (c) varies as the square root of absolute temperature – Slower when cold, faster when hot – Ex: 331 m/s at 32ºF, 353 m/s at 100ºF 6 Sound (cont.) • Sound waves have alternating high and low pressure phases • Pure tones (sine waves) go from maximum pressure to minimum pressure and back to maximum pressure. This is one cycle or one waveform period (T). T 7 Wavelength and Frequency • If we know the waveform period and the speed of sound, we can compute how far the sound wave travels during one cycle. -

Xlt41 Two-Way Multi-Angle / Pa System with 90° X 40° Hf Horn
XLT41 TWO-WAY MULTI-ANGLE / PA SYSTEM WITH 90° X 40° HF HORN SPECIFICATIONS (See notes 1 and 2) Loudspeaker Type: 2-way, multi-angle / PA, bass ported Operating Range: 70 Hz - 18 kHz, 70 Hz - 18 kHz (+/-5dB) Max Input (Passive): 200W continuous, 500W program 40 volts RMS, 89 volts momentary peak Recommended Power Amp: 420W to 600W @ 8 Ohms 14.9 in. Max Inputs (Biamp): 379 mm LF: (Same as for Passive mode) Recommended LF Power Amp: (Same as for Passive mode) HF: 50W continuous, 125W program 20 volts RMS, 45 volts momentary peak Recommended HF Power Amp: 100W to 150W @ 8 Ohms Sensitivity 1W/1m: 97 dB SPL (70 Hz - 18 kHz 1/3 octave bands) 96 dB SPL (250 Hz - 4 kHz speech range) APPLICATIONS: Maximum Output: 120 dB SPL / 127 dB SPL (peak) Nominal Impedance (passive): 8 Ohms • Theatres / Auditoria Min Impedance: 5.2 Ohms @ 210 Hz • Portable PA Nominal Impedances (Biamp): LF: 8 Ohms, HF: 8 Ohms Nominal -6 dB Beamwidth: • Houses of Worship 80° H (+6° / -18°, 2 kHz - 10 kHz) • Clubs 35° V (+8° / -3°, 2 kHz - 10 kHz) • Bands Axial Q / DI: 24.4 / 13.9, 2 kHz - 10 kHz Crossover Frequency: 2 kHz Recommended Signal Processing: 60 Hz high pass filter FEATURES: Drivers: LF (1) 12", Ferrofluid-cooled • Dual-position Floor Monitor or Upright PA Use HF (1) 1" exit, titanium diaphragm • 1" Titanium HF Driver Driver Protection: PowerSense™ DDP Input Connection: (2) Neutrik NL4MP, (2) 1/4 in. jack • Switchable Passive / Biamp Modes Controls: Passive / Biamp switch, 2 position HF level switch • 2 Position HF Level Switch Enclosure: Black carpet covered particle -
December, 1973 TABLE of CONTENTS
N,78/ A STUDY OF THE OPERATION AND CONSTRUCTION OF SPEAKER SYSTEMS/ENCLOSURES THESIS Presented to the Graduate Council of the North Texas State University in Partial Fulfillment of the Requirements For the Degree of MASTER OF SCIENCE By Harry Steven Allen, B. S. Denton, Texas December, 1973 TABLE OF CONTENTS Page LIST OF ILLUSTRATIONS. .. v Chapter I. INTRODUCTION . Purposes of Study Basic Assumptions Limitations of the Study Definition of Terms Need for the Study Recent and Related Studies Method of Procedure Organization of Study II. THE LOUDSPEAKER*. .*.00. .. *... 11 Magnetic Assembly Voice Coil Diaphragm Loudspeaker Suspension Rim Suspension The Frame Mechanics of Design Acoustic Theory Loudspeaker Efficiency Loudspeaker Impedance Crossover Networks III. FINITE, INFINITE AND ACOUSTIC SUSPENSION BAFFLE . 32 Finite Baffle Infinite Baffles Sealed Enclosures Acoustic Suspension Speaker System Efficiency Considerations Construction Details IV. PHASE INVERTER OR BASS REFLEX ENCLOSURE - . - - - * 45 Determining Port Size Tuning the Enclosure Port Ducted Port Damping the Ducted Port Construction Considerations iii Chapter Page Mounting the Loudspeaker Summary V. HORN TYPE ENCLOSURES - - - . - - - . *.. 58 Acoustic Theory of Operation Horn Shapes and Cutoff Frequency Design Calculations Construction Considerations Phasing of Multi-speaker Horn Systems Bracing Damping Advantages and Disadvantages of Horn Systems VI. ENCLOSURE CONSTRUCTION DETAILS . 74 Construction Material and Techniques Bracing and Joinery Damping Techniques Duct and Port Calculations Mounting Hardware and Wiring Terminals Electrical Wiring Considerations Grille Assembly Testing Speaker System The Room As Part of The Acoustic Circuit Sources of Acoustic Data VIII. SUMMARY FINDINGS, CONCLUSIONS AND RECOMMENDATIONS ... .. , ......... 94 Summary Findings Conclusions Recommendations APPENDICES . * . , * * * * . 99 BIBLIOGRAPHY . 117 iv LIST OF ILLUSTRATIONS Figure Page 1. -

AIW26B Operating Manual Genelec AIW26B Operating Manual
AIW26B Operating Manual Genelec AIW26B Operating Manual Introduction Installation The Genelec AIW26B Active In-wall Genelec recommends that you use the loudspeaker system consists of a bass services of an authorized installation reflex type two-way loudspeaker and a specialist or other competent and matched remote amplifier module, RAM1. experienced installation company for the It The AIW26B can be used in the most installation of the AIW26B system. Ask your demanding applications, like the main local Genelec dealer for recommended L-C-R array of a Home Theater system, installation companies in your region. critical Stereo listening or rear/side channels of a large, state-of-the-art Home Matching loudspeakers Theater. and amplifiers Each AIW26B loudspeaker unit has been Figure 1. Symmetrical L-C-R Unpacking factory calibrated for optimum performance loudspeaker placement A Genelec AIW26B set includes the items with the RAM1 amplifier it is shipped listed below. Check that nothing is missing with. Never mix these matched amplifier- or damaged during transport and delivery. If loudspeaker systems in the installation there is a problem with the product, contact process. The matching units are marked with conventional loudspeakers. A secondary your local Genelec dealer. the same ID number on the reflex port of the function of the DCW is to reduce the off-axis AIW26B enclosure and the top panel of the radiated sound energy, thereby minimizing • AIW26B loudspeaker unit. RAM1. the reflections from the side walls, floor and • Grille ceiling. This results in a precise and stable • AIW26B cardboard cut-out template Loudspeaker placement sound image • RAM1 amplifier unit Genelec AIW26B loudspeakers are If the AIW26B loudspeakers are used in an • Mains power cable equipped with Genelec’s proprietary application where their capability for precise • Plexiglass cover for the control Directivity Control Waveguide (DCW). -

Loudspeaker and Headphone Handbook, Third Edition
111 111 0 111 0 0111 0 0 111 111 Loudspeaker and 111 Headphone Handbook 0 111 0 0111 0 0 111 111 This Page Intentionally Left Blank 0 0111 0111 0 0 1 Contents iii 111 Loudspeaker and Headphone 0 Handbook Third Edition Edited by John Borwick 0111 With specialist contributors 0111 0 0 Focal Press 111 OXFORD AUCKLAND BOSTON JOHANNESBURG MELBOURNE NEW DELHI iv Contents 111 Focal Press An imprint of Butterworth-Heinemann Linacre House, Jordan Hill, Oxford OX2 8DP 225 Wildwood Avenue, Woburn, MA 01801–2041 A division of Reed Educational and Professional Publishing Ltd A member of the Reed Elsevier plc group First published 1988 0 Second edition 1994 Reprinted 1997, 1998 Third edition 2001 © Reed Educational and Professional Publishing Ltd 2001 All rights reserved. No part of this publication may be reproduced in any material form (including photocopying or storing in any medium by electronic means and whether or not transiently or incidentally to some other use of this publication) without the written permission of the copyright holder except in accordance with the provisions of the 0111 Copyright, Designs and Patents Act 1988 or under the terms of a licence issued by the Copyright Licensing Agency Ltd, 90 Tottenham Court Road, London, England W1P 0LP. Applications for the copyright holder’s written permission to reproduce any part of this publication should be addressed to the publishers British Library Cataloguing in Publication Data Loudspeaker and headphone handbook. – 3rd ed. 1. Headphones – Handbooks, manuals, etc. 2. Loudspeakers – Handbooks, manuals, etc. I. Borwick, John 0111 621.38284 Library of Congress Cataloguing in Publication Data Loudspeaker and headphone handbook/edited by John Borwick, with specialist contributors – 3rd ed. -

Engineering the Future of Loudspeaker Design Graphical Solution of Electrical Filters Increasing Sensitivity of Fm Tuners Multip
DECEMBER, 1956 50¢ ENGINEERING MUSIC SOUND REPRODUCTION The problem of building stable transistor amplifiers hinges on the stabilization of the individual stages. See page 47 for the details. Build this concrete.block speaker enclosure which is put to- gether like building blocks and which may be taken apart and reassembled easily in another location. See page 21. THE FUTURE OF LOUDSPEAKER DESIGN GRAPHICAL SOLUTION OF ELECTRICAL FILTERS INCREASING SENSITIVITY OF FM TUNERS MULTIPLE TAPE COPYING www.americanradiohistory.com SKITCH ...on his Presto Turntable "MY CUSTOM HI -FI OUTFIT is as important to me as my Visit the Hi -Ft Sowed .Salon nearest you to verify Mr. Mercedes -Benz sports car," says Skitch Henderson, Henderson's comments. Whether you currently own a con- pianist, TV musical director and audiophile. "That's ventional "one- piece" phonograph -or custom components- we be with the difference you'll hear why I chose a PRESTO turntable to spin my records. In think you'll gratified you records through custom hi -fi components my many years working with radio and recording when play your teamed with a PRESTO turntable. Write for free brochure, studios I've never seen engineers play back records on "Skitch, on Pitch," to Dept. AX, Presto Recording Corpora- anything but a turntable -and it's usually a PRESTO tion, P.O. Box 500, Paramus, N. J. turntable. MODEL T -2 12" "Promenade" turntable "My own experience backs up the conclusion of the en- (33'h and 45) four pole motor, $49.50 MODEL T-18 12" "'Pirouette" turntable gineers: for absolutely constant turntable speed with no 031/4,45 and 78) four pole motor, annoying 'Wow' and 'Flutter,' especially at critical with Hysteresis motor (Model T-18H), ,131.00 33'%s and 45 rpm speeds, for complete elimination of MODEL T -68 16" "Pirouette" turntable motor noise and 'rumble,' I've found nothing equals a (33%, 45 and 78) four pole motor, i. -

VHD4.18 Technical Data Sheet
VHD4.18 Technical Data Sheet Introduction The VHD4.18 is a quad 18" subwoofer system, comprising of four individual loudspeaker cabinets. The objective is to make the system easy to transport and setup. When assembled, the VHD4.18 system becomes a high efficiency neodymium subwoofer system with immense output. The system was designed with very high sensitivity in mind; it provides 110 dB at 1W/1m and a tremendous output of 149dB when running at full power Each cabinet incorporates a large port area that becomes an optimized horn aperture when all four cabinets are stacked together. The quad 18" subwoofer system delivers extreme output and controlled low frequency resolution. Features ● Professional, Baltic birch construction with highly resistant polymer coating Application ● Very High Definition low frequency reproduction Specifically designed to accompany the ● 146dB sustained output / 149dB peak (using 4 units of VHD4.18) VHD2.0 and VHD1.0 as a true full range ● Large chamber horn reflex acoustic design high output system for live performance ● Single 18" low frequency driver with 4" (100 mm) inside/outside, epoxy baked, and music high temperature voice coil assembly and neodymium magnetic structure ● Proprietary side handles (6) for simplified handling and carrying ● Hire and Production ● High impact low friction feet, allowing lock-in to other VHD cabinets and easy ● Concert venues cabinet movement ● Large Theatres ● Front locking aluminium VHD wheel boards with wraparound hardwood bumpers ● Scalable into multiple large systems ●