Loudspeaker and Headphone Handbook, Third Edition
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

California State University, Northridge a Digital
CALIFORNIA STATE UNIVERSITY, NORTHRIDGE A DIGITAL LOUDSPEAKER EQUALIZATION TECHNIQUE A graduate project submitted in pmiial fulfillment of the requirements For the degree of Master of Science in Electrical Engineering By Colby J Buddelmeyer December, 2011 The project of Colby J Buddelmeyer is approved: Dr. Xiyi Hang Date Professor Benjamin F. Mallard Date Date California State University, Northridge 11 DEDICATION To my wife, Anna Pomerantz: Thank you for your support, encouragement, and patience. I could not have finished this journey without you. 111 ACKNOWLEDGEMENT I would like to thank Dr. Sean Olive, Allan Devantier, and the Harman International R & D Group for allowing me to use the HATS (Hannan Audio Test System) as part of my project. Their work has fmihered our understanding of listening and created tools to revolutionize speaker design. I also want to thank Tim Prenta, Vice President of Acoustics and Kevin Bailey, Director of Mechanical Engineering at Hannan Consumer for their support of my project. They allowed me tin1e to pursue my Masters and gave me access to the tools and resources used to build this project. Their support made this project possible and I am in their debt. Special thanks also to my project advisor Dr. Ichiro Hashimoto for his mentming, encouragement, and friendship. His teachings will greatly influence the course of my future endeavors. Much appreciation goes out to Dr. Xiyi Hang and Professor Benjamin Mallard for evaluating my project and being such great instructors. Thanks to Jolm Jackson for assisting me in taking measurements and providing guidance as to their meaning. Lastly, I wish to thank Brian Castro, Mark Glazer, James Hall, and Charles Sprinkle for sharing their knowledge of loudspeakers and DSP. -

The Acoustic Design of Minimum Diffraction Coaxial Loudspeakers with Integrated Waveguides
Audio Engineering Society Convention Paper Presented at the 142nd Convention 2017 May 20–23 Berlin, Germany This Convention paper was selected based on a submitted abstract and 750-word precis that have been peer reviewed by at least two qualified anonymous reviewers. The complete manuscript was not peer reviewed. This convention paper has been reproduced from the author's advance manuscript without editing, corrections, or consideration by the Review Board. The AES takes no responsibility for the contents. This paper is available in the AES E-Library, http://www.aes.org/e-lib. All rights reserved. Reproduction of this paper, or any portion thereof, is not permitted without direct permission from the Journal of the Audio Engineering Society. The Acoustic Design of Minimum Diffraction Coaxial Loudspeakers with Integrated Waveguides Aki Mäkivirta, Jussi Väisänen, Ilpo Martikainen, Thomas Lund, Siamäk Naghian Genelec Oy, Iisalmi, Finland Correspondence should be addressed to Aki Mäkivirta ([email protected]) ABSTRACT Complementary to precision microphones, creating an ideal point source monitoring speaker has long been considered the holy grail of loudspeaker design. Coaxial transducers unfortunately typically come with several design compromises, such as adding intermodulation distortion, giving rise to various sources of diffraction, and resulting in somewhat restricted maximum output performance or frequency response. In this paper, we review the history of coaxial transducer design, considerations for an ideal point source loudspeaker, discuss the performance of a minimum diffraction coaxial loudspeaker and describe novel designs where the bottlenecks of conventional coaxial transducers have been eliminated. In these, the coaxial element also forms an integral part of a compact, continuous waveguide, thereby further facilitating smooth off-axis dispersion. -

Wired Presentationpro™ Public Address System PA310 Owner’S Manual
Wired PresentationPro™ Public Address System PA310 Owner’s Manual Shown with optional MB-PA3W wall mounting bracket and TP-30 tripod sold separately califone.com Califone PA310 Rev 01 0214 PA310 PresentationPro™ Owner’s Manual Thank you for purchasing this PresentationPro™ (PA310), the most versatile and portable PA for use in school, business, Houses of Worship and government facilities. We encourage you to visit www.califone.com/registration.php, to register your product for its warranty coverage, to sign up to receive our newsletter, download our catalog, and learn more about the complete line of Califone audio visual products, including portable and installed wireless PA systems, multimedia players and recorders, headphones and headsets, computer peripheral equipment, visual presentation products and language learning materials. Unpacking your PresentationPro™ Contents Inspection and inventory of your system. Check unit carefully a) PA310 Powered Amplifier* for damage that may have occurred during transit. Each PresentationPro™ product is carefully inspected at the b) PI-RC Remote Control and (2) AAA Batteries factory and packed in a special carton for safe transport. c) Quick Start Sheet ALL DAMAGE CLAIMS MUST BE MADE *MB-PA3W mounting bracket sold separately WITH THE FREIGHT CARRIER Notify the freight carrier immediately if you observe any damage the shipping carton or product. Repack the unit in the carton and await inspection by the carrier’s claim agent. Notify your dealer of the pending freight claim. Connections and Functions Warranty Registration NOTE: When first connecting other equipment to “aux in” or “line” in make certain that their power is Please visit the Califone website to register your off and volume control at minimum. -

Loudspeakers and Headphones 21 –24 August 2013 Helsinki, Finland
CONFERENCE REPORT AES 51 st International Conference Loudspeakers and Headphones 21 –24 August 2013 Helsinki, Finland CONFERENCE REPORT elsinki, Finland is known for having two sea - An unexpectedly large turnout of 130 people almost sons: August and winter (adapted from Con - overwhelmed the organizers as over 75% of them Hnolly). However, despite some torrential rain in registered around the time of the “early bird” cut-off the previous week, the weather during the conference date. Twenty countries were represented with most of was excellent. The conference was held at the Helsinki the participants coming from Europe, but some came Congress Paasitorni, which was built in the first from as far away as Los Angeles, San Francisco, Lima, decades of the twentieth century. The recently restored Rio de Janeiro, Tokyo, and Guangzhou. Companies building is made of granite that was dug from the such Apple, Beats, Comsol, Bose, Genelec, Harman, ground where the building now stands. The location KEF, Neumann, Nokia, Samsung, Sennheiser, Skype, near the city center and right by the harbor proved to and Sony were represented by their employees. be an excellent location both for transportation and Universities represented included Aalto (in Helsinki), the social program. Aalborg, Budapest, and Kyushu. 790 J. Audio Eng. Soc., Vol. 61, No. 10, 2013 October CONFERENCE REPORT A packed House of Science and Letters for the Tutorial Day Sponsors Juha Backmann insists that “Reproduced audio WILL be better in the future.” J. Audio Eng. Soc., Vol. 61, No. 10, 2013 October 791 CONFERENCE REPORT low-frequency performance can still be designed using Thiele- Small parameters in a simulation, and the effect of individual parameters (such as voice coil length and pole piece size) on the system performance can be seen directly. -
Voip V2 Loudspeaker Amplifier (Wireless) Operations Guide
VoIP V2 Loudspeaker Amplifier (Wireless) Operations Guide Part #011096 Document Part #930361E for Firmware Version 6.0.0 CyberData Corporation 3 Justin Court Monterey, CA 93940 (831) 373-2601 VoIP V2 Paging Amplifier Operations Guide 930361E Part # 011096 COPYRIGHT NOTICE: © 2011, CyberData Corporation, ALL RIGHTS RESERVED. This manual and related materials are the copyrighted property of CyberData Corporation. No part of this manual or related materials may be reproduced or transmitted, in any form or by any means (except for internal use by licensed customers), without prior express written permission of CyberData Corporation. This manual, and the products, software, firmware, and/or hardware described in this manual are the property of CyberData Corporation, provided under the terms of an agreement between CyberData Corporation and recipient of this manual, and their use is subject to that agreement and its terms. DISCLAIMER: Except as expressly and specifically stated in a written agreement executed by CyberData Corporation, CyberData Corporation makes no representation or warranty, express or implied, including any warranty or merchantability or fitness for any purpose, with respect to this manual or the products, software, firmware, and/or hardware described herein, and CyberData Corporation assumes no liability for damages or claims resulting from any use of this manual or such products, software, firmware, and/or hardware. CyberData Corporation reserves the right to make changes, without notice, to this manual and to any such product, software, firmware, and/or hardware. OPEN SOURCE STATEMENT: Certain software components included in CyberData products are subject to the GNU General Public License (GPL) and Lesser GNU General Public License (LGPL) “open source” or “free software” licenses. -

ACCESS for Ells 2.0 Headset Specifications
ACCESS for ELLs 2.0 Headset Specifications The table below outlines features for headsets and recording devices and WIDA’s rationale in recommending those features. Please note that WIDA does not endorse specific brands or devices. Recommended Reason for Recommendation Alternatives not Features Recommended Device: Allows for recording and playback using Separate headphones and Headset the same device. microphone increase the need to ensure proper connection and setup on the computer and thus complicate the testing site set-up. Headset Design: Comfortable when worn for a longer In ear headphones (ear buds) that Over Ear period of time by students of different are placed directly in the ear canal Headphones ages. Weight and size of headphones are more difficult to clean between can be selected based on students’ age. uses by different students. They are Portable headphones are smaller and also not suitable for younger lighter and hence may be suitable for students. Many ear buds come with younger students. Deluxe headphones the microphone attached to the are larger and heavier but have the cord, making capturing the advantage of canceling out more noise. students’ voice more of a challenge. Play Back Mode: The sound files of the assessment are Stereo recorded and played back in stereo. Noise Cancellation Noise cancellation often does not Many headsets with a noise Feature: cancel out the sound of human voices. cancellation feature require a power source (e.g. batteries or USB None connection) and hence complicate the testing site set-up. Type of Connector Some computers have two ports for Many USB-connected headsets Plug: connecting audio-out and audio-in require driver installation, but • Single 3.5 mm separately, while others have one port perform adequately for audio plug (TRRS) for both. -

Headamp 6 Manual
HeadAmp6 PROFESSIONAL SIX CHANNEL HEADPHONE AMPLIFIER OPERATION MANUAL 1 IMPORTANT SAFETY INSTRUCTIONS – READ FIRST This symbol, wherever it appears, This symbol, wherever it appears, alerts alerts you to the presence of uninsulated you to important operating and maintenance dangerous voltage inside the enclosure. Voltage instructions in the accompanying literature. that may be sufficient to constitute a risk of shock. Please read manual. Read Instructions: Retain these safety and operating instructions for future reference. Heed all warnings printed here and on the equipment. Follow the operating instructions printed in this user guide. Do Not Open: There are no user serviceable parts inside. Refer any service work to qualified technical personnel only. Power Sources: Only connect the unit to mains power of the type marked on the rear panel. The power source must provide a good ground connection. Power Cord: Use the power cord with sealed mains plug appropriate for your local mains supply as provided with the equipment. If the provided plug does not fit into your outlet consult your service agent. Route the power cord so that it is not likely to be walked on, stretched or pinched by items placed upon or against. Grounding: Do not defeat the grounding and polarization means of the power cord plug. Do not remove or tamper with the ground connection on the power cord. Ventilation: Do not obstruct the ventilation slots or position the unit where the air required for ventilation is impeded. If the unit is to be operated in a rack, case or other furniture, ensure that it is constructed to allow adequate ventilation. -
ACP+: DIY Preamp and Headphone Amplifier Project
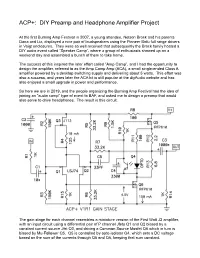
ACP+: DIY Preamp and Headphone Amplifier Project At the first Burning Amp Festival in 2007, a young attendee, Nelson Brock and his parents Dana and Liz, displayed a nice pair of loudspeakers using the Pioneer Bofu full range drivers in Voigt enclosures. They were so well received that subsequently the Brock family hosted a DIY audio event called “Speaker Camp”, where a group of enthusiasts showed up on a weekend day and assembled a bunch of them to take home. The success of this inspired the later effort called “Amp Camp”, and I had the opportunity to design the amplifier, referred to as the Amp Camp Amp (ACA), a small single-ended Class A amplifier powered by a desktop switching supply and delivering about 5 watts. This effort was also a success, and years later the ACA kit is still popular at the diyAudio website and has also enjoyed a small upgrade in power and performance. So here we are in 2019, and the people organizing the Burning Amp Festival had the idea of joining an “audio camp” type of event to BAF, and asked me to design a preamp that would also serve to drive headphones. The result is this circuit: The gain stage for each channel resembles a miniature version of the First Watt J2 amplifier, with an input circuit using a differential pair of P channel Jfets Q1 and Q2 biased by a constant current source Jfet Q3, and driving a Common Source Mosfet Q6 which in turn is biased by Mu-Follower Q5. Q5 is controlled by opto-isolator Q4, which sets a DC voltage based on the sum of the currents through Q5 and Q6, keeping that sum constant. -

Genelec AIW25 Active In-Wall Loudspeaker Operating Manual
Operating Manual AIW25 Genelec AIW25 Active In-Wall Loudspeaker Genelec AIW25 Active In-Wall Loudspeaker The Genelec AIW25 Active In-Wall loud- Installation This results in a precise and stable sound speaker system consists of a two-way image. loudspeaker enclosure and a matched Genelec recommends that you use the ser- If the AIW25 loudspeakers are used in an remote amplifier module, RAM2. It has been vices of an authorized installation special- application where their capability for precise designed to the same rigorous standards as ist or other competent and experienced sound imaging is needed, such as the front Genelec’s high-performance HT series active installation company for the installation of channels of a Surround Sound system or a Home Theater loudspeakers. No other in- the AIW25 system. Ask your local Genelec Stereo system, we recommend that the loud- wall loudspeaker in this size class can match dealer for recommended installation compa- speakers are placed as far away from cor- the low distortion, neutrality and high sound nies in your region. ners or other walls and reflective surfaces as pressure capability of Genelec AIW25. The possible. The loudspeakers should be placed AIW25 can be used in the most demanding Matching loudspeakers and symmetrically in relation to the listening posi- applications, like the main L-C-R array of a amplifiers tion and there should be no obstructions Home Theater system, critical Stereo listen- Each AIW25 loudspeaker has been factory between the loudspeaker and the listener. ing or rear/side channels of a medium sized, calibrated for optimum performance with the This guarantees clear dialogue in films and a state-of-the-art Home Theater. -

Chapter 186 NOISE
Chapter 186 NOISE §186-1. Loud and unnecessary noise §186-3. Permits for amplifying devices. prohibited. §186-4. Stationary noise limits; maximum §186-2. Loud and unnecessary noises permissible sound levels. enumerated. §186-5. Violations and penalties. [HISTORY: Adopted by the Village Board of the Village of Albany 5-11-1992 as Sec. 11-2- 7 of the 1992 Code. Amendments noted where applicable.] GENERAL REFERENCES Disorderly conduct -- See Ch. 110. Parks and navigable waters -- See Ch. 198, §198-1B(2). Peace and good order -- See Ch. 202. §186-1. Loud and unnecessary noise prohibited. It shall be unlawful for any person to make, continue or cause to be made or continued any loud and unnecessary noise. It shall be unlawful for any person knowingly or wantonly to use or operate, or to cause to be used or operated, any mechanical device, machine, apparatus or instrument for intensification or amplification of the human voice or any sound or noise in any public or private place in such manner that the peace and good order of the neighborhood is disturbed or that persons owning, using or occupying property in the neighborhood are disturbed or annoyed. §186-2. Loud and unnecessary noises enumerated. The following acts are declared to be loud, disturbing and unnecessary noises in violation of this chapter, but this enumeration shall not be deemed to be exclusive: A. Horns; signaling devices. The sounding of any horn or signaling device on any automobile, motorcycle or other vehicle on any street or public place in the village for longer than three seconds in any period of one minute or less, except as a danger warning; the creation of any unreasonable loud or harsh sound by means of any signaling device and the sounding of any plainly audible device for an unreasonable period of time; the use of any signaling device except one operated by hand or electricity; the use of any horn, whistle or other device operated by engine exhaust and the use of any signaling device when traffic is for any reason held up. -
11.8 Loudspeaker Enclosures 11-71
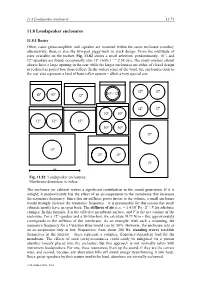
11.8 Loudspeaker enclosures 11-71 11.8 Loudspeaker enclosures 11.8.1 Basics Often, cases guitar-amplifier and -speaker are mounted within the same enclosure (combo); alternatively, there is also the two-part piggy-back or stack design. From the multitude of sizes available on the market, Fig. 11.82 shows a small selection: predominantly, 10”- and 12”-speakers are found, occasionally also 15” (with 1” = 2.54 cm). The small combos almost always have a large opening in the rear while the larger enclosures are either of closed design or realized as ported box (bass-reflex). In the widest sense of the word, the enclosures open to the rear also represent a kind of bass-reflex system – albeit a very special one. Fig. 11.82: Loudspeaker enclosures; Membrane-diameters in inches The enclosure (or cabinet) makes a significant contribution to the sound generation. If it is airtight, it predominantly has the effect of an air-suspension to the membrane that increases the resonance frequency. Since this air-stiffness grows invers to the volume, a small enclosure would strongly increase the resonance frequency – it is presumably for this reason that small 5 2 cabinets mostly have an open back. The stiffness of air is sL = 1.4⋅10 Pa ⋅ S / V for adiabatic changes. In this formula, S is the effective membrane surface, and V is the net volume of the enclosure. For a 12”-speaker and a 50-litre-box, we calculate 9179 N/m – this approximately corresponds to the stiffness of the membrane. As an example: with such a mounting, the resonance frequency for a Celestion Blue would rise by 50%. -
Application Notes
Measurement of Loudspeaker and Microphone Performance using Dual Channel FFT-Analysis by Henrik Biering M.Sc, Briiel&Kjcer Introduction In general, the components of an audio system have well-defined — mostly electrical — inputs and out puts. This is a great advantage when it comes to objective measurements of the performance of such devices. Loudspeakers and microphones, how ever, being electro-acoustic transduc ers, are the major exceptions to the rule and present us with two impor tant problems to be considered before meaningful evaluation of these devices is possible. Firstly, since measuring instru ments are based on the processing of electrical signals, any measurement of acoustical performance involves the Fig. 1. General set-up for loudspeaker measurements. The Digital Cassette Recorder Type use of both a transmitter and a receiv- 7400 is used for storage of the measurement set-ups in addition to storage of the If we intend to measure the re- measured data. Graphics Recorder Type 2313 is used for reformatting data and for ., „ J, ,, „ plotting results sponse of one of these, the response ol the other must have a "flat" frequency response, or at least one that is known in advance. Secondly, neither the output of a loudspeaker nor the input to a micro phone are well-defined under practical circumstances where the interaction between the transducer and the room cannot be neglected if meaningful re sults — i.e. results correlating with subjective evaluations — are to be ob tained. See Fig. 2. For this reason a single specific measurement type for the character ization of a transducer cannot be de- r.- n T ,-,,-,■ -.