Signal Filtering, Signal Suppression, Signal Processing Signal Filtering Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Effects of High Frequency Current Ripple on Electric Vehicle Battery Performance
Original citation: Uddin, Kotub , Moore, Andrew D. , Barai, Anup and Marco, James. (2016) The effects of high frequency current ripple on electric vehicle battery performance. Applied Energy, 178 . pp. 142-154. Permanent WRAP URL: http://wrap.warwick.ac.uk/80006 Copyright and reuse: The Warwick Research Archive Portal (WRAP) makes this work of researchers of the University of Warwick available open access under the following conditions. This article is made available under the Creative Commons Attribution 4.0 International license (CC BY 4.0) and may be reused according to the conditions of the license. For more details see: http://creativecommons.org/licenses/by/4.0/ A note on versions: The version presented in WRAP is the published version, or, version of record, and may be cited as it appears here. For more information, please contact the WRAP Team at: [email protected] warwick.ac.uk/lib-publications Applied Energy 178 (2016) 142–154 Contents lists available at ScienceDirect Applied Energy journal homepage: www.elsevier.com/locate/apenergy The effects of high frequency current ripple on electric vehicle battery performance ⇑ Kotub Uddin , Andrew D. Moore, Anup Barai, James Marco WMG, International Digital Laboratory, The University of Warwick, Coventry CV4 7AL, UK highlights Experimental study into the impact of current ripple on li-ion battery degradation. 15 cells exercised with 1200 cycles coupled AC–DC signals, at 5 frequencies. Results highlight a greater spread of degradation for cells exposed to AC excitation. Implications for BMS control, thermal management and system integration. article info abstract Article history: The power electronic subsystems within electric vehicle (EV) powertrains are required to manage both Received 8 April 2016 the energy flows within the vehicle and the delivery of torque by the electrical machine. -

Active Control of Loudspeakers: an Investigation of Practical Applications
Downloaded from orbit.dtu.dk on: Dec 18, 2017 Active control of loudspeakers: An investigation of practical applications Bright, Andrew Paddock; Jacobsen, Finn; Polack, Jean-Dominique; Rasmussen, Karsten Bo Publication date: 2002 Document Version Early version, also known as pre-print Link back to DTU Orbit Citation (APA): Bright, A. P., Jacobsen, F., Polack, J-D., & Rasmussen, K. B. (2002). Active control of loudspeakers: An investigation of practical applications. General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. Active Control of Loudspeakers: An Investigation of Practical Applications Andrew Bright Ørsted·DTU – Acoustic Technology Technical University of Denmark Published by: Ørsted·DTU, Acoustic Technology, Technical University of Denmark, Building 352, DK-2800 Kgs. Lyngby, Denmark, 2002 3 This work is dedicated to the memory of Betty Taliaferro Lawton Paddock Hunt (1916-1999) and to Samuel Raymond Bright, Jr. (1936-2001) 4 5 Table of Contents Preface 9 Summary 11 Resumé 13 Conventions, notation, and abbreviations 15 Conventions...................................................................................................................................... -

Switching-Ripple-Based Current Sharing for Paralleled Power Converters
Switching-ripple-based current sharing for paralleled power converters The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Perreault, D.J., K. Sato, R.L. Selders, and J.G. Kassakian. “Switching-Ripple-Based Current Sharing for Paralleled Power Converters.” IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications 46, no. 10 (1999): 1264–1274. © 1999 IEEE As Published http://dx.doi.org/10.1109/81.795839 Publisher Institute of Electrical and Electronics Engineers (IEEE) Version Final published version Citable link http://hdl.handle.net/1721.1/86985 Terms of Use Article is made available in accordance with the publisher's policy and may be subject to US copyright law. Please refer to the publisher's site for terms of use. 1264 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS—I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 46, NO. 10, OCTOBER 1999 Switching-Ripple-Based Current Sharing for Paralleled Power Converters David J. Perreault, Member, IEEE, Kenji Sato, Member, IEEE, Robert L. Selders, Jr., and John G. Kassakian, Fellow, IEEE Abstract— This paper presents the implementation and ex- perimental evaluation of a new current-sharing technique for paralleled power converters. This technique uses information naturally encoded in the switching ripple to achieve current sharing and requires no intercell connections for communicating this information. Practical implementation of the approach is addressed and an experimental evaluation, based on a three-cell prototype system, is also presented. It is shown that accurate and stable load sharing is obtained over a wide load range. Finally, an alternate implementation of this current-sharing technique is described and evaluated. -
Simple Simple Digital Filter Design for Analogue Engineers
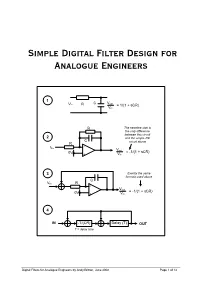
Simple Digital Filter Design for Analogue Engineers 1 C Vout Vin R = 1/(1 + sCR) Vin R The negative sign is the only difference between this circuit 2 and the simple RC C R circuit above - Vin Vout 0V = -1/(1 + sCR) + Vin 3 Exactly the same formula used above C Vin R - Vout 0V = -1/(1 + sCR) + Vin 4 IN -T/(CR) Delay (T) OUT T = delay time Digital Filters for Analogue Engineers by Andy Britton, June 2008 Page 1 of 14 Introduction If I’d read this document years ago it would have saved me countless hours of agony and confusion understanding what should be conceptually very simple. My biggest discontent with topical literature is that they never cleanly relate digital filters to “real world” analogue filters. This article/document sets out to: - • Describe the function of a very basic RC low pass analogue filter • Convert this filter to an analogue circuit that is digitally realizable • Explain how analogue functions are converted to digital functions • Develop a basic 1st order digital low-pass filter • Develop a 2nd order filter with independent Q and frequency control parameters • Show how digital filters can be proven/designed using a spreadsheet such as excel • Demonstrate digital filters by showing excel graphs of signals • Explain the limitations of use of digital filters i.e. when they become unstable • Show how these filters fit in to the general theory (yawn!) Before the end of this article you should hopefully find something useful to guide you on future designs and allow you to successfully implement a digital filter. -

Linear Filtering of Random Processes
Linear Filtering of Random Processes Lecture 13 Spring 2002 Wide-Sense Stationary A stochastic process X(t) is wss if its mean is constant E[X(t)] = µ and its autocorrelation depends only on τ = t1 − t2 ∗ Rxx(t1,t2)=E[X(t1)X (t2)] ∗ E[X(t + τ)X (t)] = Rxx(τ) ∗ Note that Rxx(−τ)=Rxx(τ)and Rxx(0) = E[|X(t)|2] Lecture 13 1 Example We found that the random telegraph signal has the autocorrelation function −c|τ| Rxx(τ)=e We can use the autocorrelation function to find the second moment of linear combinations such as Y (t)=aX(t)+bX(t − t0). 2 2 Ryy(0) = E[Y (t)] = E[(aX(t)+bX(t − t0)) ] 2 2 2 2 = a E[X (t)] + 2abE[X(t)X(t − t0)] + b E[X (t − t0)] 2 2 = a Rxx(0) + 2abRxx(t0)+b Rxx(0) 2 2 =(a + b )Rxx(0) + 2abRxx(t0) −ct =(a2 + b2)Rxx(0) + 2abe 0 Lecture 13 2 Example (continued) We can also compute the autocorrelation Ryy(τ)forτ =0. ∗ Ryy(τ)=E[Y (t + τ)Y (t)] = E[(aX(t + τ)+bX(t + τ − t0))(aX(t)+bX(t − t0))] 2 = a E[X(t + τ)X(t)] + abE[X(t + τ)X(t − t0)] 2 + abE[X(t + τ − t0)X(t)] + b E[X(t + τ − t0)X(t − t0)] 2 2 = a Rxx(τ)+abRxx(τ + t0)+abRxx(τ − t0)+b Rxx(τ) 2 2 =(a + b )Rxx(τ)+abRxx(τ + t0)+abRxx(τ − t0) Lecture 13 3 Linear Filtering of Random Processes The above example combines weighted values of X(t)andX(t − t0) to form Y (t). -
MPA15-16 a Baseband Pulse Shaping Filter for Gaussian Minimum Shift Keying
A BASEBAND PULSE SHAPING FILTER FOR GAUSSIAN MINIMUM SHIFT KEYING 1 2 3 3 N. Krishnapura , S. Pavan , C. Mathiazhagan ,B.Ramamurthi 1 Department of Electrical Engineering, Columbia University, New York, NY 10027, USA 2 Texas Instruments, Edison, NJ 08837, USA 3 Department of Electrical Engineering, Indian Institute of Technology, Chennai, 600036, India Email: [email protected] measurement results. ABSTRACT A quadrature mo dulation scheme to realize the Gaussian pulse shaping is used in digital commu- same function as Fig. 1 can be derived. In this pap er, nication systems like DECT, GSM, WLAN to min- we consider only the scheme shown in Fig. 1. imize the out of band sp ectral energy. The base- band rectangular pulse stream is passed through a 2. GAUSSIAN FREQUENCY SHIFT lter with a Gaussian impulse resp onse b efore fre- KEYING GFSK quency mo dulating the carrier. Traditionally this The output of the system shown in Fig. 1 can b e describ ed is done by storing the values of the pulse shap e by in a ROM and converting it to an analog wave- Z t form with a DAC followed by a smo othing lter. g d 1 y t = cos 2f t +2k c f This pap er explores a fully analog implementation 1 of an integrated Gaussian pulse shap er, which can where f is the unmo dulated carrier frequency, k is the c f result in a reduced power consumption and chip mo dulating index k =0:25 for Gaussian Minimum Shift f area. Keying|GMSK[1] and g denotes the convolution of the rectangular bit stream bt with values in f1; 1g 1. -
Output Ripple Voltage for Buck Switching Regulator (Rev. A)
Application Report SLVA630A–January 2014–Revised October 2014 Output Ripple Voltage for Buck Switching Regulator Surinder P. Singh, Ph.D., Manager, Power Applications Group............................. WEBENCH® Design Center ABSTRACT Switched-mode power supplies (SMPSs) are used to regulate voltage to a certain level. SMPSs have an inherent switching action, which causes the currents and voltages in the circuit to switch and fluctuate. The output voltage also has ripple on top of the regulated steady-state DC value. Designers of power systems consider the output voltage ripple to be both a key parameter for design considerations and a key figure of merit. The online WEBENCH® Power Designer recognizes the key importance of peak-to-peak voltage output ripple voltage—the ripple voltage is calculated and reported in the visualizer [1]. This application report presents a closed-form analytical formulation for the output voltage ripple waveform and the peak-to-peak ripple voltage. This formulation is accurate over all regions of operation and harmonizes the peak-to-peak ripple voltage calculation over all regions of operation. The new analytical formulation presented in this application report gives an accurate evaluation of the output ripple as compared to the simplified linear or root-mean square (RMS) approximations often used. In this application report, the analytical model for output voltage waveform and peak-to-peak ripple voltage for buck is derived. This model is validated against SPICE TINA-TI simulations. This report presents the behavior of ripple peak-to-voltage for various input conditions and choices of output capacitor and compare it against SPICE TINA-TI results. -

Simulating the Directivity Behavior of Loudspeakers with Crossover Filters
Audio Engineering Society Convention Paper Presented at the 123rd Convention 2007 October 5–8 New York, NY, USA The papers at this Convention have been selected on the basis of a submitted abstract and extended precis that have been peer reviewed by at least two qualified anonymous reviewers. This convention paper has been reproduced from the author's advance manuscript, without editing, corrections, or consideration by the Review Board. The AES takes no responsibility for the contents. Additional papers may be obtained by sending request and remittance to Audio Engineering Society, 60 East 42nd Street, New York, New York 10165-2520, USA; also see www.aes.org. All rights reserved. Reproduction of this paper, or any portion thereof, is not permitted without direct permission from the Journal of the Audio Engineering Society. Simulating the Directivity Behavior of Loudspeakers with Crossover Filters Stefan Feistel1, Wolfgang Ahnert2, and Charles Hughes3, and Bruce Olson4 1 Ahnert Feistel Media Group, Arkonastr.45-49, 13189 Berlin, Germany [email protected] 2 Ahnert Feistel Media Group, Arkonastr.45-49, 13189 Berlin, Germany [email protected] 3 Excelsior Audio Design & Services, LLC, Gastonia, NC, USA [email protected] 4 Olson Sound Design, Brooklyn Park, MN, USA [email protected] ABSTRACT In previous publications the description of loudspeakers was introduced based on high-resolution data, comprising most importantly of complex directivity data for individual drivers as well as of crossover filters. In this work it is presented how this concept can be exploited to predict the directivity balloon of multi-way loudspeakers depending on the chosen crossover filters. -

Designing Filters Using the Digital Filter Design Toolkit Rahman Jamal, Mike Cerna, John Hanks
NATIONAL Application Note 097 INSTRUMENTS® The Software is the Instrument ® Designing Filters Using the Digital Filter Design Toolkit Rahman Jamal, Mike Cerna, John Hanks Introduction The importance of digital filters is well established. Digital filters, and more generally digital signal processing algorithms, are classified as discrete-time systems. They are commonly implemented on a general purpose computer or on a dedicated digital signal processing (DSP) chip. Due to their well-known advantages, digital filters are often replacing classical analog filters. In this application note, we introduce a new digital filter design and analysis tool implemented in LabVIEW with which developers can graphically design classical IIR and FIR filters, interactively review filter responses, and save filter coefficients. In addition, real-world filter testing can be performed within the digital filter design application using a plug-in data acquisition board. Digital Filter Design Process Digital filters are used in a wide variety of signal processing applications, such as spectrum analysis, digital image processing, and pattern recognition. Digital filters eliminate a number of problems associated with their classical analog counterparts and thus are preferably used in place of analog filters. Digital filters belong to the class of discrete-time LTI (linear time invariant) systems, which are characterized by the properties of causality, recursibility, and stability. They can be characterized in the time domain by their unit-impulse response, and in the transform domain by their transfer function. Obviously, the unit-impulse response sequence of a causal LTI system could be of either finite or infinite duration and this property determines their classification into either finite impulse response (FIR) or infinite impulse response (IIR) system. -

Finite Impulse Response (FIR) Digital Filters (II) Ideal Impulse Response Design Examples Yogananda Isukapalli
Finite Impulse Response (FIR) Digital Filters (II) Ideal Impulse Response Design Examples Yogananda Isukapalli 1 • FIR Filter Design Problem Given H(z) or H(ejw), find filter coefficients {b0, b1, b2, ….. bN-1} which are equal to {h0, h1, h2, ….hN-1} in the case of FIR filters. 1 z-1 z-1 z-1 z-1 x[n] h0 h1 h2 h3 hN-2 hN-1 1 1 1 1 1 y[n] Consider a general (infinite impulse response) definition: ¥ H (z) = å h[n] z-n n=-¥ 2 From complex variable theory, the inverse transform is: 1 n -1 h[n] = ò H (z)z dz 2pj C Where C is a counterclockwise closed contour in the region of convergence of H(z) and encircling the origin of the z-plane • Evaluating H(z) on the unit circle ( z = ejw ) : ¥ H (e jw ) = åh[n]e- jnw n=-¥ 1 p h[n] = ò H (e jw )e jnwdw where dz = jejw dw 2p -p 3 • Design of an ideal low pass FIR digital filter H(ejw) K -2p -p -wc 0 wc p 2p w Find ideal low pass impulse response {h[n]} 1 p h [n] = H (e jw )e jnwdw LP ò 2p -p 1 wc = Ke jnwdw 2p ò -wc Hence K h [n] = sin(nw ) n = 0, ±1, ±2, …. ±¥ LP np c 4 Let K = 1, wc = p/4, n = 0, ±1, …, ±10 The impulse response coefficients are n = 0, h[n] = 0.25 n = ±4, h[n] = 0 = ±1, = 0.225 = ±5, = -0.043 = ±2, = 0.159 = ±6, = -0.053 = ±3, = 0.075 = ±7, = -0.032 n = ±8, h[n] = 0 = ±9, = 0.025 = ±10, = 0.032 5 Non Causal FIR Impulse Response We can make it causal if we shift hLP[n] by 10 units to the right: K h [n] = sin((n -10)w ) LP (n -10)p c n = 0, 1, 2, …. -

Advanced Electronic Systems Damien Prêle
Advanced Electronic Systems Damien Prêle To cite this version: Damien Prêle. Advanced Electronic Systems . Master. Advanced Electronic Systems, Hanoi, Vietnam. 2016, pp.140. cel-00843641v5 HAL Id: cel-00843641 https://cel.archives-ouvertes.fr/cel-00843641v5 Submitted on 18 Nov 2016 (v5), last revised 26 May 2021 (v8) HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. advanced electronic systems ST 11.7 - Master SPACE & AERONAUTICS University of Science and Technology of Hanoi Paris Diderot University Lectures, tutorials and labs 2016-2017 Damien PRÊLE [email protected] Contents I Filters 7 1 Filters 9 1.1 Introduction . .9 1.2 Filter parameters . .9 1.2.1 Voltage transfer function . .9 1.2.2 S plane (Laplace domain) . 11 1.2.3 Bode plot (Fourier domain) . 12 1.3 Cascading filter stages . 16 1.3.1 Polynomial equations . 17 1.3.2 Filter Tables . 20 1.3.3 The use of filter tables . 22 1.3.4 Conversion from low-pass filter . 23 1.4 Filter synthesis . 25 1.4.1 Sallen-Key topology . 25 1.5 Amplitude responses . 28 1.5.1 Filter specifications . 28 1.5.2 Amplitude response curves . -
Frequency Response
EE105 – Fall 2015 Microelectronic Devices and Circuits Frequency Response Prof. Ming C. Wu [email protected] 511 Sutardja Dai Hall (SDH) Amplifier Frequency Response: Lower and Upper Cutoff Frequency • Midband gain Amid and upper and lower cutoff frequencies ωH and ω L that define bandwidth of an amplifier are often of more interest than the complete transferfunction • Coupling and bypass capacitors(~ F) determineω L • Transistor (and stray) capacitances(~ pF) determineω H Lower Cutoff Frequency (ωL) Approximation: Short-Circuit Time Constant (SCTC) Method 1. Identify all coupling and bypass capacitors 2. Pick one capacitor ( ) at a time, replace all others with short circuits 3. Replace independent voltage source withshort , and independent current source withopen 4. Calculate the resistance ( ) in parallel with 5. Calculate the time constant, 6. Repeat this for each of n the capacitor 7. The low cut-off frequency can be approximated by n 1 ωL ≅ ∑ i=1 RiSCi Note: this is an approximation. The real low cut-off is slightly lower Lower Cutoff Frequency (ωL) Using SCTC Method for CS Amplifier SCTC Method: 1 n 1 fL ≅ ∑ 2π i=1 RiSCi For the Common-Source Amplifier: 1 # 1 1 1 & fL ≅ % + + ( 2π $ R1SC1 R2SC2 R3SC3 ' Lower Cutoff Frequency (ωL) Using SCTC Method for CS Amplifier Using the SCTC method: For C2 : = + = + 1 " 1 1 1 % R3S R3 (RD RiD ) R3 (RD ro ) fL ≅ $ + + ' 2π # R1SC1 R2SC2 R3SC3 & For C1: R1S = RI +(RG RiG ) = RI + RG For C3 : 1 R2S = RS RiS = RS gm Design: How Do We Choose the Coupling and Bypass Capacitor Values? • Since the impedance of a capacitor increases with decreasing frequency, coupling/bypass capacitors reduce amplifier gain at low frequencies.