Experimental Comparison of 2-Satisfiability Algorithms (*)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Time Complexity
Chapter 3 Time complexity Use of time complexity makes it easy to estimate the running time of a program. Performing an accurate calculation of a program’s operation time is a very labour-intensive process (it depends on the compiler and the type of computer or speed of the processor). Therefore, we will not make an accurate measurement; just a measurement of a certain order of magnitude. Complexity can be viewed as the maximum number of primitive operations that a program may execute. Regular operations are single additions, multiplications, assignments etc. We may leave some operations uncounted and concentrate on those that are performed the largest number of times. Such operations are referred to as dominant. The number of dominant operations depends on the specific input data. We usually want to know how the performance time depends on a particular aspect of the data. This is most frequently the data size, but it can also be the size of a square matrix or the value of some input variable. 3.1: Which is the dominant operation? 1 def dominant(n): 2 result = 0 3 fori in xrange(n): 4 result += 1 5 return result The operation in line 4 is dominant and will be executedn times. The complexity is described in Big-O notation: in this caseO(n)— linear complexity. The complexity specifies the order of magnitude within which the program will perform its operations. More precisely, in the case ofO(n), the program may performc n opera- · tions, wherec is a constant; however, it may not performn 2 operations, since this involves a different order of magnitude of data. -

Quick Sort Algorithm Song Qin Dept
Quick Sort Algorithm Song Qin Dept. of Computer Sciences Florida Institute of Technology Melbourne, FL 32901 ABSTRACT each iteration. Repeat this on the rest of the unsorted region Given an array with n elements, we want to rearrange them in without the first element. ascending order. In this paper, we introduce Quick Sort, a Bubble sort works as follows: keep passing through the list, divide-and-conquer algorithm to sort an N element array. We exchanging adjacent element, if the list is out of order; when no evaluate the O(NlogN) time complexity in best case and O(N2) exchanges are required on some pass, the list is sorted. in worst case theoretically. We also introduce a way to approach the best case. Merge sort [4]has a O(NlogN) time complexity. It divides the 1. INTRODUCTION array into two subarrays each with N/2 items. Conquer each Search engine relies on sorting algorithm very much. When you subarray by sorting it. Unless the array is sufficiently small(one search some key word online, the feedback information is element left), use recursion to do this. Combine the solutions to brought to you sorted by the importance of the web page. the subarrays by merging them into single sorted array. 2 Bubble, Selection and Insertion Sort, they all have an O(N2) In Bubble sort, Selection sort and Insertion sort, the O(N ) time time complexity that limits its usefulness to small number of complexity limits the performance when N gets very big. element no more than a few thousand data points. -

Relations 21
2. CLOSURE OF RELATIONS 21 2. Closure of Relations 2.1. Definition of the Closure of Relations. Definition 2.1.1. Given a relation R on a set A and a property P of relations, the closure of R with respect to property P , denoted ClP (R), is smallest relation on A that contains R and has property P . That is, ClP (R) is the relation obtained by adding the minimum number of ordered pairs to R necessary to obtain property P . Discussion To say that ClP (R) is the “smallest” relation on A containing R and having property P means that • R ⊆ ClP (R), • ClP (R) has property P , and • if S is another relation with property P and R ⊆ S, then ClP (R) ⊆ S. The following theorem gives an equivalent way to define the closure of a relation. \ Theorem 2.1.1. If R is a relation on a set A, then ClP (R) = S, where S∈P P = {S|R ⊆ S and S has property P }. Exercise 2.1.1. Prove Theorem 2.1.1. [Recall that one way to show two sets, A and B, are equal is to show A ⊆ B and B ⊆ A.] 2.2. Reflexive Closure. Definition 2.2.1. Let A be a set and let ∆ = {(x, x)|x ∈ A}. ∆ is called the diagonal relation on A. Theorem 2.2.1. Let R be a relation on A. The reflexive closure of R, denoted r(R), is the relation R ∪ ∆. Proof. Clearly, R ∪ ∆ is reflexive, since (a, a) ∈ ∆ ⊆ R ∪ ∆ for every a ∈ A. -

Scalability of Reflexive-Transitive Closure Tables As Hierarchical Data Solutions
Scalability of Reflexive- Transitive Closure Tables as Hierarchical Data Solutions Analysis via SQL Server 2008 R2 Brandon Berry, Engineer 12/8/2011 Reflexive-Transitive Closure (RTC) tables, when used to persist hierarchical data, present many advantages over alternative persistence strategies such as path enumeration. Such advantages include, but are not limited to, referential integrity and a simple structure for data queries. However, RTC tables grow exponentially and present a concern with scaling both operational performance of the RTC table and volume of the RTC data. Discovering these practical performance boundaries involves understanding the growth patterns of reflexive and transitive binary relations and observing sample data for large hierarchical models. Table of Contents 1 Introduction ......................................................................................................................................... 2 2 Reflexive-Transitive Closure Properties ................................................................................................. 3 2.1 Reflexivity ...................................................................................................................................... 3 2.2 Transitivity ..................................................................................................................................... 3 2.3 Closure .......................................................................................................................................... 4 3 Scalability -

MATH 213 Chapter 9: Relations
MATH 213 Chapter 9: Relations Dr. Eric Bancroft Fall 2013 9.1 - Relations Definition 1 (Relation). Let A and B be sets. A binary relation from A to B is a subset R ⊆ A×B, i.e., R is a set of ordered pairs where the first element from each pair is from A and the second element is from B. If (a; b) 2 R then we write a R b or a ∼ b (read \a relates/is related to b [by R]"). If (a; b) 2= R, then we write a R6 b or a b. We can represent relations graphically or with a chart in addition to a set description. Example 1. A = f0; 1; 2g;B = f1; 2; 3g;R = f(1; 1); (2; 1); (2; 2)g Example 2. (a) \Parent" (b) 8x; y 2 Z; x R y () x2 + y2 = 8 (c) A = f0; 1; 2g;B = f1; 2; 3g; a R b () a + b ≥ 3 1 Note: All functions are relations, but not all relations are functions. Definition 2. If A is a set, then a relation on A is a relation from A to A. Example 3. How many relations are there on a set with. (a) two elements? (b) n elements? (c) 14 elements? Properties of Relations Definition 3 (Reflexive). A relation R on a set A is said to be reflexive if and only if a R a for all a 2 A. Definition 4 (Symmetric). A relation R on a set A is said to be symmetric if and only if a R b =) b R a for all a; b 2 A. -

Properties of Binary Transitive Closure Logics Over Trees S K
8 Properties of binary transitive closure logics over trees S K Abstract Binary transitive closure logic (FO∗ for short) is the extension of first-order predicate logic by a transitive closure operator of binary relations. Deterministic binary transitive closure logic (FOD∗) is the restriction of FO∗ to deterministic transitive closures. It is known that these logics are more powerful than FO on arbitrary structures and on finite ordered trees. It is also known that they are at most as powerful as monadic second-order logic (MSO) on arbitrary structures and on finite trees. We will study the expressive power of FO∗ and FOD∗ on trees to show that several MSO properties can be expressed in FOD∗ (and hence FO∗). The following results will be shown. A linear order can be defined on the nodes of a tree. The class EVEN of trees with an even number of nodes can be defined. On arbitrary structures with a tree signature, the classes of trees and finite trees can be defined. There is a tree language definable in FOD∗ that cannot be recognized by any tree walking automaton. FO∗ is strictly more powerful than tree walking automata. These results imply that FOD∗ and FO∗ are neither compact nor do they have the L¨owenheim-Skolem-Upward property. Keywords B 8.1 Introduction The question aboutthe best suited logic for describing tree properties or defin- ing tree languages is an important one for model theoretic syntax as well as for querying treebanks. Model theoretic syntax is a research program in mathematical linguistics concerned with studying the descriptive complex- Proceedings of FG-2006. -
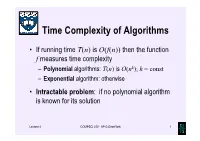
Time Complexity of Algorithms
Time Complexity of Algorithms • If running time T(n) is O(f(n)) then the function f measures time complexity – Polynomial algorithms: T(n) is O(nk); k = const – Exponential algorithm: otherwise • Intractable problem: if no polynomial algorithm is known for its solution Lecture 4 COMPSCI 220 - AP G Gimel'farb 1 Time complexity growth f(n) Number of data items processed per: 1 minute 1 day 1 year 1 century n 10 14,400 5.26⋅106 5.26⋅108 7 n log10n 10 3,997 883,895 6.72⋅10 n1.5 10 1,275 65,128 1.40⋅106 n2 10 379 7,252 72,522 n3 10 112 807 3,746 2n 10 20 29 35 Lecture 4 COMPSCI 220 - AP G Gimel'farb 2 Beware exponential complexity ☺If a linear O(n) algorithm processes 10 items per minute, then it can process 14,400 items per day, 5,260,000 items per year, and 526,000,000 items per century ☻If an exponential O(2n) algorithm processes 10 items per minute, then it can process only 20 items per day and 35 items per century... Lecture 4 COMPSCI 220 - AP G Gimel'farb 3 Big-Oh vs. Actual Running Time • Example 1: Let algorithms A and B have running times TA(n) = 20n ms and TB(n) = 0.1n log2n ms • In the “Big-Oh”sense, A is better than B… • But: on which data volume can A outperform B? TA(n) < TB(n) if 20n < 0.1n log2n, 200 60 or log2n > 200, that is, when n >2 ≈ 10 ! • Thus, in all practical cases B is better than A… Lecture 4 COMPSCI 220 - AP G Gimel'farb 4 Big-Oh vs. -

A Short History of Computational Complexity
The Computational Complexity Column by Lance FORTNOW NEC Laboratories America 4 Independence Way, Princeton, NJ 08540, USA [email protected] http://www.neci.nj.nec.com/homepages/fortnow/beatcs Every third year the Conference on Computational Complexity is held in Europe and this summer the University of Aarhus (Denmark) will host the meeting July 7-10. More details at the conference web page http://www.computationalcomplexity.org This month we present a historical view of computational complexity written by Steve Homer and myself. This is a preliminary version of a chapter to be included in an upcoming North-Holland Handbook of the History of Mathematical Logic edited by Dirk van Dalen, John Dawson and Aki Kanamori. A Short History of Computational Complexity Lance Fortnow1 Steve Homer2 NEC Research Institute Computer Science Department 4 Independence Way Boston University Princeton, NJ 08540 111 Cummington Street Boston, MA 02215 1 Introduction It all started with a machine. In 1936, Turing developed his theoretical com- putational model. He based his model on how he perceived mathematicians think. As digital computers were developed in the 40's and 50's, the Turing machine proved itself as the right theoretical model for computation. Quickly though we discovered that the basic Turing machine model fails to account for the amount of time or memory needed by a computer, a critical issue today but even more so in those early days of computing. The key idea to measure time and space as a function of the length of the input came in the early 1960's by Hartmanis and Stearns. -

Sorting Algorithm 1 Sorting Algorithm
Sorting algorithm 1 Sorting algorithm In computer science, a sorting algorithm is an algorithm that puts elements of a list in a certain order. The most-used orders are numerical order and lexicographical order. Efficient sorting is important for optimizing the use of other algorithms (such as search and merge algorithms) that require sorted lists to work correctly; it is also often useful for canonicalizing data and for producing human-readable output. More formally, the output must satisfy two conditions: 1. The output is in nondecreasing order (each element is no smaller than the previous element according to the desired total order); 2. The output is a permutation, or reordering, of the input. Since the dawn of computing, the sorting problem has attracted a great deal of research, perhaps due to the complexity of solving it efficiently despite its simple, familiar statement. For example, bubble sort was analyzed as early as 1956.[1] Although many consider it a solved problem, useful new sorting algorithms are still being invented (for example, library sort was first published in 2004). Sorting algorithms are prevalent in introductory computer science classes, where the abundance of algorithms for the problem provides a gentle introduction to a variety of core algorithm concepts, such as big O notation, divide and conquer algorithms, data structures, randomized algorithms, best, worst and average case analysis, time-space tradeoffs, and lower bounds. Classification Sorting algorithms used in computer science are often classified by: • Computational complexity (worst, average and best behaviour) of element comparisons in terms of the size of the list . For typical sorting algorithms good behavior is and bad behavior is . -

Descriptive Complexity: a Logician's Approach to Computation
Descriptive Complexity a Logicians Approach to Computation Neil Immerman Computer Science Dept University of Massachusetts Amherst MA immermancsumassedu App eared in Notices of the American Mathematical Society A basic issue in computer science is the complexity of problems If one is doing a calculation once on a mediumsized input the simplest algorithm may b e the b est metho d to use even if it is not the fastest However when one has a subproblem that will havetobesolved millions of times optimization is imp ortant A fundamental issue in theoretical computer science is the computational complexity of problems Howmuch time and howmuch memory space is needed to solve a particular problem Here are a few examples of such problems Reachability Given a directed graph and two sp ecied p oints s t determine if there is a path from s to t A simple lineartime algorithm marks s and then continues to mark every vertex at the head of an edge whose tail is marked When no more vertices can b e marked t is reachable from s i it has b een marked Mintriangulation Given a p olygon in the plane and a length L determine if there is a triangulation of the p olygon of total length less than or equal to L Even though there are exp onentially many p ossible triangulations a dynamic programming algorithm can nd an optimal one in O n steps ThreeColorability Given an undirected graph determine whether its vertices can b e colored using three colors with no two adjacentvertices having the same color Again there are exp onentially many p ossibilities -

Relations April 4
math 55 - Relations April 4 Relations Let A and B be two sets. A (binary) relation on A and B is a subset R ⊂ A × B. We often write aRb to mean (a; b) 2 R. The following are properties of relations on a set S (where above A = S and B = S are taken to be the same set S): 1. Reflexive: (a; a) 2 R for all a 2 S. 2. Symmetric: (a; b) 2 R () (b; a) 2 R for all a; b 2 S. 3. Antisymmetric: (a; b) 2 R and (b; a) 2 R =) a = b. 4. Transitive: (a; b) 2 R and (b; c) 2 R =) (a; c) 2 R for all a; b; c 2 S. Exercises For each of the following relations, which of the above properties do they have? 1. Let R be the relation on Z+ defined by R = f(a; b) j a divides bg. Reflexive, antisymmetric, and transitive 2. Let R be the relation on Z defined by R = f(a; b) j a ≡ b (mod 33)g. Reflexive, symmetric, and transitive 3. Let R be the relation on R defined by R = f(a; b) j a < bg. Symmetric and transitive 4. Let S be the set of all convergent sequences of rational numbers. Let R be the relation on S defined by f(a; b) j lim a = lim bg. Reflexive, symmetric, transitive 5. Let P be the set of all propositional statements. Let R be the relation on P defined by R = f(a; b) j a ! b is trueg. -
Algorithm Time Cost Measurement
CSE 12 Algorithm Time Cost Measurement • Algorithm analysis vs. measurement • Timing an algorithm • Average and standard deviation • Improving measurement accuracy 06 Introduction • These three characteristics of programs are important: – robustness: a program’s ability to spot exceptional conditions and deal with them or shutdown gracefully – correctness: does the program do what it is “supposed to” do? – efficiency: all programs use resources (time, space, and energy); how can we measure efficiency so that we can compare algorithms? 06-2/19 Analysis and Measurement An algorithm’s performance can be described by: – time complexity or cost – how long it takes to execute. In general, less time is better! – space complexity or cost – how much computer memory it uses. In general, less space is better! – energy complexity or cost – how much energy uses. In general, less energy is better! • Costs are usually given as functions of the size of the input to the algorithm • A big instance of the problem will probably take more resources to solve than a small one, but how much more? Figuring algorithm costs • For a given algorithm, we would like to know the following as functions of n, the size of the problem: T(n) , the time cost of solving the problem S(n) , the space cost of solving the problem E(n) , the energy cost of solving the problem • Two approaches: – We can analyze the written algorithm – Or we could implement the algorithm and run it and measure the time, memory, and energy usage 06-4/19 Asymptotic algorithm analysis • Asymptotic