Project: Design Study for a Space Elevator
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Introduction to Astronomy from Darkness to Blazing Glory
Introduction to Astronomy From Darkness to Blazing Glory Published by JAS Educational Publications Copyright Pending 2010 JAS Educational Publications All rights reserved. Including the right of reproduction in whole or in part in any form. Second Edition Author: Jeffrey Wright Scott Photographs and Diagrams: Credit NASA, Jet Propulsion Laboratory, USGS, NOAA, Aames Research Center JAS Educational Publications 2601 Oakdale Road, H2 P.O. Box 197 Modesto California 95355 1-888-586-6252 Website: http://.Introastro.com Printing by Minuteman Press, Berkley, California ISBN 978-0-9827200-0-4 1 Introduction to Astronomy From Darkness to Blazing Glory The moon Titan is in the forefront with the moon Tethys behind it. These are two of many of Saturn’s moons Credit: Cassini Imaging Team, ISS, JPL, ESA, NASA 2 Introduction to Astronomy Contents in Brief Chapter 1: Astronomy Basics: Pages 1 – 6 Workbook Pages 1 - 2 Chapter 2: Time: Pages 7 - 10 Workbook Pages 3 - 4 Chapter 3: Solar System Overview: Pages 11 - 14 Workbook Pages 5 - 8 Chapter 4: Our Sun: Pages 15 - 20 Workbook Pages 9 - 16 Chapter 5: The Terrestrial Planets: Page 21 - 39 Workbook Pages 17 - 36 Mercury: Pages 22 - 23 Venus: Pages 24 - 25 Earth: Pages 25 - 34 Mars: Pages 34 - 39 Chapter 6: Outer, Dwarf and Exoplanets Pages: 41-54 Workbook Pages 37 - 48 Jupiter: Pages 41 - 42 Saturn: Pages 42 - 44 Uranus: Pages 44 - 45 Neptune: Pages 45 - 46 Dwarf Planets, Plutoids and Exoplanets: Pages 47 -54 3 Chapter 7: The Moons: Pages: 55 - 66 Workbook Pages 49 - 56 Chapter 8: Rocks and Ice: -

1. Two Objects Attract Each Other Gravitationally. If the Distance Between Their Centers Is Cut in Half, the Gravitational Force A) Is Cut to One Fourth
MULTIPLE CHOICE REVIEW – GRAVITATION (Dynamics Part 3) 1. Two objects attract each other gravitationally. If the distance between their centers is cut in half, the gravitational force A) is cut to one fourth. B) is cut in half. C) doubles. D) quadruples 2. Two objects, with masses m1 and m2, are originally a distance r apart. The magnitude of the gravitational force between them is F. The masses are changed to 2m1 and 2m2, and the distance is changed to 4r. What is the magnitude of the new gravitational force? A) F/16 B) F/4 C) 16F D) 4F 3. As a rocket moves away from the Earth's surface, the rocket's weight A) increases. B) decreases. C) remains the same. D) depends on how fast it is moving. 4. A hypothetical planet has a mass of half that of the Earth and a radius of twice that of the Earth. What is the acceleration due to gravity on the planet in terms of g, the acceleration due to gravity at the Earth? A) g B) g/2 C) g/4 D) g/8 5. Two planets have the same surface gravity, but planet B has twice the mass of planet A. If planet A has radius r, what is the radius of planet B? A) 0.707r B) r C) 1.41r D) 4r 6. A planet is discovered to orbit around a star in the galaxy Andromeda, with the same orbital diameter as the Earth around our Sun. If that star has 4 times the mass of our Sun, what will the period of revolution of that new planet be, compared to the Earth's orbital period? A) one-fourth as much B) one-half as much C) twice as much D) four times as much 7. -
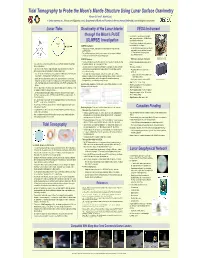
Tidal Tomography to Probe the Moon's Mantle Structure Using
Tidal Tomography to Probe the Moon’s Mantle Structure Using Lunar Surface Gravimetry Kieran A. Carroll1, Harriet Lau2, 1: Gedex Systems Inc., [email protected] 2: Department of Earth and Planetary Sciences, Harvard University, [email protected] Lunar Tides Gravimetry of the Lunar Interior VEGA Instrument through the Moon's PulSE • Gedex has developed a low cost compact space gravimeter instrument , VEGA (Vector (GLIMPSE) Investigation Gravimeter/Accelerometer) Moon • Currently this is the only available gravimeter that is suitable for use in space Earth GLIMPSE Investigation: • Proposed under NASA’s Lunar Surface Instrument and Technology Payloads • ca. 1972 MIT developed a space gravimeter (LSITP) program. instrument for use on the Moon, for Apollo 17. That instrument is long-ago out of • To fly a VEGA instrument to the Moon on a commercial lunar lander, via NASA’s production and obsolete. Commercial Lunar Payload Services (CLPS) program. VEGA under test in thermal- GLIMPSE Objectives: VEGA Space Gravimeter Information vacuum chamber at Gedex • Prove the principle of measuring time-varying lunar surface gravity to probe the lunar • Measures absolute gravity vector, with no • Just as the Moon and the Sun exert tidal forces on the Earth, the Earth exerts tidal deep interior using the Tidal Tomography technique. bias forces on the Moon. • Determine constraints on parameters defining the Lunar mantle structure using time- • Accuracy on the Moon: • Tidal stresses in the Moon are proportional to the gravity gradient tensor field at the varying gravity measurements at a location on the surface of the Moon, over the • Magnitude: Effective noise of 8 micro- Moon’s centre, multiplies by the distance from the Moon’s centre. -

Chapter 3 Projects Test Monday Gravity
Chapter 3 Celestial Sphere Movie Gravity and Motion Projects Test Monday Preview • I moved due-date for Part 1 to 10/21 Ch 1 Ch 2 • I added a descriptive webpage about the Galileo Movie projects. Essay 1: Backyard Astronomy Ch. 3 (just beginning) Northern Hemisphere sky: Big Dipper Little Dipper Cassiopeia Orion Polaris Gravity The Problem of Astronomical Motion • Gravity gives the Universe its structure • Astronomers of antiquity did – It is a universal force that not connect gravity and causes all objects to pull on astronomical motion all other objects • Galileo investigated this everywhere connection with experiments – It holds objects together using projectiles and balls – It is responsible for holding rolling down planks the Earth in its orbit around • He put science on a course to the Sun, the Sun in its orbit determine laws of motion and around the Milky Way, and to develop the scientific the Milky Way in its path method within the Local Group Inertia and Newton’s First Law Inertia • This concept was • Galileo established the idea of inertia incorporated in – A body at rest tends to remain at rest Newton’s First Law – A body in motion tends to remain in motion of Motion: – Through experiments with inclined planes, Galileo demonstrated the idea of inertia and the A body continues in a importance of forces (friction) state of rest or uniform motion in a straight line unless made to change that state by forces acting on it Newton’s First Law Astronomical Motion • As seen earlier, planets • Must there be a force at move along curved work? • Important ideas of (elliptical) paths, or Newton’s First Law – The law implies that if • Yes! an object is not moving orbits. -

The Mass of the Moon Is 1/81 of the Mass of the Earth. Q14.1 Compared to the Gravitational Force That the Earth Exerts on the Mo
Q14.1 The mass of the Moon is 1/81 of the mass of the Earth. Compared to the gravitational force that the Earth exerts on the Moon, the gravitational force that the Moon exerts on the Earth is A. 812 = 6561 times greater. B. 81 times greater . C. equally strong. D1/81D. 1/81 as great. E. (1/81)2 = 1/6561 as great. © 2012 Pearson Education, Inc. A14.1 The mass of the Moon is 1/81 of the mass of the Earth. Compared to the gravitational force that the Earth exerts on the Moon, the gravitational force that the Moon exerts on the Earth is A. 812 = 6561 times greater. B. 81 times greater . C. equally strong. D1/81D. 1/81 as great. E. (1/81)2 = 1/6561 as great. © 2012 Pearson Education, Inc. Q14.2 The planet Saturn has 100 times the mass of the Earth and is 10 times more distant from the Sun than the Earth is. Compared to the Earth’s acceleration as it orbits the Sun, the accelileration of fS Saturn as ibihSiit orbits the Sun is A. 100 times greater. B. 10 times greater . C. the same. D1/10D. 1/10 as great. E. 1/100 as great. © 2012 Pearson Education, Inc. A14.2 The planet Saturn has 100 times the mass of the Earth and is 10 times more distant from the Sun than the Earth is. Compared to the Earth’s acceleration as it orbits the Sun, the accelileration of fS Saturn as ibihSiit orbits the Sun is A. -

A Astronomical Terminology
A Astronomical Terminology A:1 Introduction When we discover a new type of astronomical entity on an optical image of the sky or in a radio-astronomical record, we refer to it as a new object. It need not be a star. It might be a galaxy, a planet, or perhaps a cloud of interstellar matter. The word “object” is convenient because it allows us to discuss the entity before its true character is established. Astronomy seeks to provide an accurate description of all natural objects beyond the Earth’s atmosphere. From time to time the brightness of an object may change, or its color might become altered, or else it might go through some other kind of transition. We then talk about the occurrence of an event. Astrophysics attempts to explain the sequence of events that mark the evolution of astronomical objects. A great variety of different objects populate the Universe. Three of these concern us most immediately in everyday life: the Sun that lights our atmosphere during the day and establishes the moderate temperatures needed for the existence of life, the Earth that forms our habitat, and the Moon that occasionally lights the night sky. Fainter, but far more numerous, are the stars that we can only see after the Sun has set. The objects nearest to us in space comprise the Solar System. They form a grav- itationally bound group orbiting a common center of mass. The Sun is the one star that we can study in great detail and at close range. Ultimately it may reveal pre- cisely what nuclear processes take place in its center and just how a star derives its energy. -

How High Can You Jump on Other Planets?
Student activity How high can you jump on other planets? Background Information Weight and mass are very different even though the words are used interchangeably in the English language. Mass is a measure of the total amount of material or matter that makes up a body and is measured in kg. Weight is a measure of how much force pulls on a body and is measured in Newtons (N). Weight is dependent on mass and acceleration or gravity ‘g’. The mathematical relationship can be described with the following equation: W = m x g (N) ‘g’ varies according to which planet you are standing on. In general, planets with more mass have stronger surface gravity. On the Earth’s surface g = 9.8kg/m/s2 (where m = metres and s = seconds). If your mass is 70kg, then your Weight = 70 x 9.8 = 686 N So your weight can vary according to which planet you are standing on, however your mass stays the same. Students are provided with relative scaling factors for the surface gravity of the Sun, the other planets in our Solar System, Pluto (a dwarf planet) and the Moon. With this information they can calculate and compare the heights of their jumps and the reading that bathroom scales (calibrated on Earth) would have if they were to stand on the different bodies in the Solar System. The stronger the surface gravity, the more they are pulled by the planet, moon or star so it would make it more difficult for them to jump. Object Surface Gravity (ms-2) Surface Gravity relative to Earth Earth 9.8 1 Sun 273.42 27.9 Mercury 3.72 0.38 Venus 8.92 0.91 Mars 3.72 0.38 Jupiter 23.13 2.36 Saturn 9.02 0.92 Uranus 8.72 0.89 Neptune 10.98 1.12 Pluto (dwarf planet) 0.59 0.06 The Moon 1.63 0.16 Worksheet http://museumvictoria.com.au/scienceworks/education/ 1 Student activity How high can you jump on other planets? Worksheet Introduction The larger the mass of the planet, moon or star, the more it would pull on you and the harder it would be to jump. -

Apollo and Beyond
APOLLO AND BEYOND VERSION (SUBTITLES) REVISED: JUN 17, 2019 SCENE TIME SCRIPT INTRO INTRODUCTION 00:00 Four fundamental forces control the universe. The strong and weak nuclear forces act inside atoms and molecules, like the hydrogen and oxygen atoms in a water molecule. The third force, electromagnetism, binds atoms and molecules together. 00:29 Gravity, the fourth force, is dramatically different. You can feel gravity. It is the force of attraction connecting you to everything else in the universe. It extends across space: never going away. 00:44 For millions of years, gravity trapped life in Earth's oceans. But eventually life defied gravity as it rode ocean waves onto the land. 00:55 By the 18th century we had built hot air balloons to carry us above the Earth's surface. 01:02 To challenge gravity in the 20th century, we invented jet engines, powering airplanes that could fly around the world. 01:10 Then we built rockets powerful enough to defy the pull of Earth's gravity and carry 24 Apollo astronauts to the Moon. 2 01:31 Meanwhile astronomers discovered how gravity affects the entire universe: controlling the motions of stars and the formation of galaxies. In this program we'll pay tribute to the astronauts and astronomers who defy gravity as they uncover its secrets. TITLES OPENING TITLES 01:50 Apollo & Beyond Conquering Gravity Jim Bratton, Walter Cronkite, and The Apollo Astronauts PART 1 Apollo Past 01:58 Our gravity adventure began in 1962 at Rice Stadium in Houston, TX. “We choose to go to the Moon. -

Student Sheet PA: Investigation Results (Page 1 of 6)
Student’s Name ______________________________________________ Date ______________ Class ___________ Student Sheet PA: Investigation Results (page 1 of 6) Investigation PA.1: Phases of the Moon 1. How often does a full moon appear? ___________________________________________________________ 2. How often does a new moon appear? __________________________________________________________ 3. What other patterns, if any, can you see in the month of pictures? ________________________________ 4. Why is a portion of the Moon lit and the other portion of the Moon dark in some of the images? 5. Where is the Moon located with respect to Earth and the Sun during the new moon? ______________ 6. Where is the Moon located with respect to Earth and the Sun during the full moon? _______________ Investigation PA.2: Gravity 1. What factors did you consider in deciding which bodies would be the Sun, planets, and moons? 2. What factors did you consider when deciding how far apart the bodies in your solar system should be? ___________________________________________________________________________________ 3. Think about the factors you considered as you constructed your model. Describe how you think gravity holds the solar system together. _________________________________________________________ © Smithsonian Institution 4. What do you know about patterns in solar systems that may have influenced your model? STC My Generation™: Space Systems Exploration Pre-Assessment / Our Amazing Universe Student’s Name ______________________________________________ Date ______________ Class ___________ Student Sheet PA: Investigation Results (page 2 of 6) Investigation PA.3: Scale Properties 1. Which moon do you think is larger, A or B? Explain. _____________________________________________ 2. Which crater do you think is larger, A or B? Explain. _____________________________________________ 3. What is the diameter (in kilometers) of crater B? Show your work. -

1 Surface Gravity
Astro/EPS C12 (2008) – Mike Wong Problem Set 1 Solution Guide 1 Surface gravity Problem 1A First find a formula for g: F = mobject g G m m F = planet object r2 G m m m g = planet object object r2 G m g = planet r2 For the last column of the table, just divide by the Earth’s surface gravitational −2 acceleration g⊕ = 9.8 m sec . As an example, here is the calculation for the International Space Station. The other parts of the problem are done the same way. Use the distance to the Earth’s center (350 km + the Earth’s radius) and the mass of the Earth, be- cause the space station itself is too tiny to exert much of a gravitational pull on anything. 1000 m r = r + 350 km = 6370 km + 350 km = 6720 km × = 6.72 × 106 m ⊕ 1 km 24 mplanet = 5.97 × 10 kg G m 6.67 × 10−11 m3 kg−1 sec−2 5.97 × 1024 kg g = planet = = 8.82 m sec−2 r2 (6.72 × 106)2 m2 −2 −2 % of Earth surface gravity = g/g⊕ = 8.82 m sec / 9.8 m sec = 90% 1 Gravitational acceleration Distance to center Mass of planet/ of planet/object object (% of Earth Location (m) (kg) (m s–2 ) surface gravity) Surface of the Moon 1.74 10 6 7.35 10 22 1.6 17% Surface of Pluto 1.18 10 6 (p.75) 1.3 10 22 0.62 6.4% Surface of Ceres 4.57 10 5 9.4 10 20 0.3 3% Surface of Enchilladus 5.4 10 5 1.1 10 21 0.25 2.6% International Space Station orbiting 350 km 6.7 10 6 5.97 10 24 8.8 90% above Earth’s surface Problem 1B “Weight is a measure of gravitational force” means we can use the F from part 1A as the weight. -

A ~7.5 Earth-Mass Planet Orbiting the Nearby Star, GJ
A ∼7.5 Earth-Mass Planet Orbiting the Nearby Star, GJ 876 Eugenio J. Rivera2,3,4,JackJ.Lissauer3,R.PaulButler4, Geoffrey W. Marcy5,StevenS. Vogt2,DebraA.Fischer6,TimothyM.Brown7, Gregory Laughlin2 [email protected] ABSTRACT High precision, high cadence radial velocity monitoring over the past 8 years at the W. M. Keck Observatory reveals evidence for a third planet orbiting the nearby (4.69 pc) dM4 star GJ 876. The residuals of three-body Newtonian fits, which include GJ 876 and Jupiter mass companions b and c, show significant power at a periodicity of 1.9379 days. Self-consistently fitting the radial velocity data with a model that includes an additional body with this period significantly improves the quality of the fit. These four-body (three-planet) Newtonian fits find that the minimum mass of companion “d” is m sin i =5.89 ± 0.54 M⊕ and that its orbital period is 1.93776(± 7 × 10−5) days. Assuming coplanar orbits, the inclination of the GJ 876 system is likely ∼ 50◦. This inclination yields a mass for companion d of < 9 M⊕, making it by far the lowest mass companion yet found around a main sequence star other than our Sun. Subject headings: stars: GJ 876 – planetary systems – planets and satellites: general 1Based on observations obtained at the W.M. Keck Observatory, which is operated jointly by the Uni- versity of California and the California Institute of Technology. 2UCO/Lick Observatory, University of California at Santa Cruz, Santa Cruz, CA, 95064 3NASA/Ames Research Center, Space Science Division, MS 245-3, Moffett Field, CA, 94035 4Department of Terrestrial Magnetism, Carnegie Institution of Washington, 5241 Broad Branch Road NW, Washington DC, 20015-1305 5Department of Astronomy, University of California, Berkeley, CA 94720 6Department of Physics and Astronomy, San Francisco State University, San Francisco, CA 94132 7High Altitude Observatory, National Center for Atmospheric Research, P.O. -

13.3 Black Holes: Gravity's Ultimate Victory
13.3 Black Holes: Gravity's Ultimate Victory · Our Goals for Learning · What is a black hole? · What would it be like to visit a black hole? · Do black holes really exist? What is a black hole? A black hole is an object whose gravity is so powerful that not even light can escape it. Question: Escape Velocity The surface gravity force of a planet of mass M and radius R on a rocket of mass m is F = G × M × m ÷ R2 To escape an object's gravity, a rocket must overcome that force, which the rocket does by reaching escape velocity. If you increase the force, you increase the rocket's required escape velocity. So¼ what happens to the escape velocity from an object if you shrink the object? What happens to the escape velocity from an object if you shrink the object? 1. Escape velocity decreases, because radius decreases 2. Escape velocity doesn't change, since the mass is the same 3. Escape velocity increases, because radius decreases What happens to the escape velocity from an object if you shrink the object? 1. Escape velocity decreases, because radius decreases 2. Escape velocity doesn't change, since the mass is the same 3. Escape velocity increases, because radius decreases Escape Velocity Final Kinetic Initial Gravitational = Energy Potential Energy (escape velocity)2 G × (planet mass) = 2 (planet radius) Light would not be able to escape Earth's surface if you could shrink the Earth to a radius < 1 cm The ªsurfaceº of a black hole is the radius at which the escape velocity equals the speed of light.