Wolfpack Instruction Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Long Night of the Tankers: Hitler’S War Against Caribbean Oil
University of Calgary PRISM: University of Calgary's Digital Repository University of Calgary Press University of Calgary Press Open Access Books 2014 Long Night of the Tankers: Hitler’s War Against Caribbean Oil Bercuson, David J.; Herwig, Holger H. University of Calgary Press Bercuson, D. J. & Herwig, H. H. "Long Night of the Tankers: Hitler’s War Against Caribbean Oil". Beyond Boundaries: Canadian Defence and Strategic Studies Series; 4. University of Calgary Press, Calgary, Alberta, 2014. http://hdl.handle.net/1880/49998 book http://creativecommons.org/licenses/by-nc-nd/4.0/ Attribution Non-Commercial No Derivatives 4.0 International Downloaded from PRISM: https://prism.ucalgary.ca University of Calgary Press www.uofcpress.com LONG NIGHT OF THE TANKERS: HITLER’S WAR AGAINST CARIBBEAN OIL David J. Bercuson and Holger H. Herwig ISBN 978-1-55238-760-3 THIS BOOK IS AN OPEN ACCESS E-BOOK. It is an electronic version of a book that can be purchased in physical form through any bookseller or on-line retailer, or from our distributors. Please support this open access publication by requesting that your university purchase a print copy of this book, or by purchasing a copy yourself. If you have any questions, please contact us at [email protected] Cover Art: The artwork on the cover of this book is not open access and falls under traditional copyright provisions; it cannot be reproduced in any way without written permission of the artists and their agents. The cover can be displayed as a complete cover image for the purposes of publicizing this work, but the artwork cannot be extracted from the context of the cover of this specific work without breaching the artist’s copyright. -

Introduction to Sonar, Navy Training Course. INSTITUTION Bureau of Naval Personnel, Washington, R
DOCUMENT RESUME ED 070 572 SE 014 119 TITLE Introduction to Sonar, Navy Training Course. INSTITUTION Bureau of Naval Personnel, Washington, R. C.-; Naval Personnel Program Support Activity, Washington, D. C. REPORT NO NAVPERS -10130 -B PUB DATE 68 NOTE 186p.; Revised 1968 EDRS PRICE MF-$0.65 HC-$6.58 DESCRIPTORS *Acoustics; Instructional Materials; *Job Training; *Military Personnel; Military Science; Military Training; Physics; *Post Secondary Education; *Supplementary Textbooks ABSTRACT Fundamentals of sonar systems are presented in this book, prepared for both regular navy and naval reserve personnel who are seeking advancement in rating. An introductory description is first made of submarines and antisubmarine units. Determination of underwater targets is analyzed from the background of true and relative bearings, true and relative motion, and computation of target angles. Then, applications of both active and passive sonars are explained in connection with bathythesmographs, fathometers, tape recorders, fire control techniques, tfiternal and external communications systems, maintenance actions, test methods and equipment, and safety precautions. Basic principles of sound and temperature effects on wave propagation are also discussed. Illustrations for explanation use, information on training films and the sonar technician rating structure are also provided.. (CC) -^' U.S DEPARTMENT OFHEALTH. EDUCATION 14 WELFARE OFFICE OF EOUCATION THIS DOCUMENT HASBEEN REPRO OUCED EXACTLY ASRECEIVED FROM THE PERSON ORORGANIZATION ORIG INATING IT POINTS OFVIEW OR OPIN IONS STATED 00NOT NECESSARILY REPRESENT OFFICIAL OFFICEDF EDU CATION POSITION ORPOLICY 1-1:1444646- 1 a 7 ero AIM '440, a 40 ;13" : PREFACE. This book is written for themen of the U. S. Navy and Naval Reserve who are seeking advancement in theSonar Technician rating. -

U.S. Gato Class 26 Submarine Us Navy Measure 32/355-B
KIT 0384 85038410200 GENERAL HULL PAINT GUIDE U.S. GATO CLASS 26 SUBMARINE US NAVY MEASURE 32/355-B In the first few months immediately following the Japanese attack on surface and nine knots under water. Their primary armament consisted Pearl Harbor, it was the U. S. Navy’s submarine force that began unlimited of twenty-four 21-inch torpedoes which could be fired from six tubes in the warfare against Japan. While the surfaces forces regrouped, the submarines bow and four in the stern. Most GATO class submarines typically carried began attacking Japanese shipping across the Pacific. Throughout the war, one 3-inch, one 4-inch, or one 5-inch deck gun. To defend against aircraft American submarines sunk the warships of the Imperial Japanese Navy and while on the surface, one or two 40-mm guns were usually fitted, and cut the lifeline of merchant vessels that provided Japan with oil and other these were supplemented by 20mm cannon as well as .50 caliber and vital raw materials. They also performed other important missions like staging .30 caliber machine guns. Gato class subs were 311'9" long, displaced commando raids and rescuing downed pilots. The most successful of the 2,415 tons while submerged, and carried a crew of eighty-five men. U. S. fleet submarines during World War II were those of the GATO class. Your hightly detailed Revell 1/72nd scale kit can be used to build one of Designed to roam the large expanses of the Pacific Ocean, these submarines four different WWII GATO class submarines: USS COBIA, SS-245, USS were powered by two Diesel engines, generating 5,400 horse power for GROWLER, SS-215, USS SILVERSIDES, SS-236, and the USS FLASHER, operating on the surface, and batteries provided power while submerged. -

The Centurion Tank Pdf, Epub, Ebook
THE CENTURION TANK PDF, EPUB, EBOOK Pat Ware,Brian Delf | 128 pages | 19 Apr 2013 | Pen & Sword Books Ltd | 9781781590119 | English | South Yorkshire, United Kingdom The Centurion Tank PDF Book The Comet was a relatively new design entering service only in and seeing additional combat in the upcoming Korean War. Vietnam Studies. July Learn how and when to remove this template message. Ivan Siiak. Retrieved 2 September Centurion Universal Tank — The next Centurion model, Mk. Maximum Range: miles km. Despite these changes, the department concluded that the weight restriction would not allow the tank design to withstand the 88 mm rounds. During the Indo-Pakistani War, Allied tanks were deployed on both sides. Israelis entering Hebron captured 25 Jordanian Centurion tanks. Cape Town: Struik Publishers. Archived from the original on 17 June While the air war was of particular historical note - it featured the first aerial combat between jet fighters - the war would still be hard fought on the ground across unforgiving terrain and environments. Centurion Main Battle Tank Specifications. The Mk 11 was an Mk 6 model with the ranging gun and infrared equipment. Great Bookham, Surrey: Profile Publications. Osprey Publishing. It was equipped with a pounder Cape Town: Tafelberg. The designations follows the pattern of main gun calibre in centimetres followed by the service order number. Height: 9. Related Content " ". Three were lost in training incidents with no deaths among the crew. The Centurion Mk II promised better battlefield protection through use of more armor and serial production from a strong government order was underway by the end of November of It became one of the most widely used tank designs, equipping armies around the world, with some still in service until the s. -

Merit International
Table of Contents By Brand (Click logo to jump to page) AFV-AC14401 AFV-AC32001 1/144 STICKER FOR SIMULATING SENSORS 1/32 Have Glass II for AC12105 AFV-AC32005 AFV-AC35001 1/32 F117A for TP03219 1/35 M41 GUN SHIELD COVER AFV-AC35002 AFV-AC35003 1/35 CLEARANCE INDICATOR POLES ZIMMERIT COATING APPLICATOR AFV-AC35004 AFV-AC35005 1/35 TRANSPARENT PERISCOPE FOR TIGER I LATE VERSION 1/35 TRANSPARENT PERISCOPE FOR SD.KFZ.251 SERIES AFV-AC35006 AFV-AC35008 1/35 GERMAN OPTICAL EQUIPMENT SET 1/35 MANTLET COVER FOR CENTURION (TYPE A) AFV-AC35015 AFV-AC35021 STICKER FOR SIMULATING ANTI REFLECTION COATING 1/35 CAMOUFLAGE NET - SNOW GRAY LENS(LEOPARD) AFV-AC35201 AFV-AC35206 PC. PANEL FOR SIMULATING MODERN VEHICLE (AIRCRAFT) ANTI-SLIP COATING STICKERS FOR VEHICLE TANK AFV-AF02007 AFV-AF02008 PZKPFW VI AUSF B TIGER II LEOPARD II A5 AFV-AF02009 AFV-AF02010 M1A2 ABRAMS TYPE 90 MBT AFV-AF10001 AFV-AF12101 1/100 MIG-25 1/12 Elementary school desk w/chairs AFV-AF12102 AFV-AF35015 1/12 High school single seat desks w/chairs 1/35 M18 Hellcat AFV-AF35016 AFV-AF35019 1/35 NATO YPR-765 AIFV(25m TURRET) 1/35 M3 STUART T16 TRACK (WORKABLE) AFV-AF35020 AFV-AF35021 1/35 M5/M8 LIGHT TANK T36E6 TRK(WORKABL) 1/35 ANTI-TANK WEAPONS M40A1 & TOW A1 AFV-AF35022 AFV-AF35026 1/35 LVTP-5 US MARINES VIETNAM 1/35 M4/M3 T51 TRACK(WORKABLE) AFV-AF35036 AFV-AF35041 1/35 M26/M46 T80E1 TRACK 1/35 M41 WALKER BULLDOG LT TANK AFV-AF35044 AFV-AF35047 1/35 SDKFZ 11 TRACK (WORKABLE) 1/35 SDKFZ 11 LATE VERSION - WOOD CAB AFV-AF35050 AFV-AF35052 1/35(terminated) FH18 105MM CANNON 1/35 M41 -
The Submarine Simulation
THE SUBMARINE SIMULATION INTRODUCTION Silent Service is a detailed simulation of World War II submarine missions in the Pacific. It places you into the role of submarine captain and presents you with the same information, problems and resources available to an actual sub captain. Included are numerous scenarios, options and play variations. Five detailed battle station screens, numerous commands, and realistic graphics and sound effects combine to provide a dramatic level of realism and playability. As is detailed later, US submarines played a crucial role in stemming the tide of Japanese imperialism and winning the war in the Pacific. The primary mission of the American Silent Service was to take on the Japanese Navy in their home waters and to neutralise the Japanese Merchant Marine. As submarine commander in this elite force, you will be evaluated based on the number and types of ship which you sink. The first group of scenarios recreate actual historical situations and require a variety of different tactics. They are useful for becoming acquainted with the mechanics of this simulation, practising specific situations, or for quick games. The real test of a submariner's skill however, are are the Patrol scenarios. Here you will encounter an almost infinite variety of situations as you seek out and attack enemy convoys. With a limited number of torpedoes and fuel, your goal is to sink a maximum tonnage of enemy shipping and bring your sub successfully back to base. As an accurate simulation of a real life-situation, there are numerous details, subtleties and features included in the simulation. -

LIBERTY UNIVERSITY Master's Thesis the M26 Pershing
LIBERTY UNIVERSITY Master’s Thesis The M26 Pershing: America’s Forgotten Tank - Developmental and Combat History Author : Reader : Supervisor : Robert P. Hanger Dr. Christopher J. Smith Dr. David L. Snead A thesis submitted in fulfillment of the requirements for the degree of Master’s of Arts In the Liberty University Department of History May 11, 2018 Abstract The M26 tank, nicknamed the “General Pershing,” was the final result of the Ordnance Department’s revolutionary T20 series. It was the only American heavy tank to be fielded during the Second World War. Less is known about this tank, mainly because it entered the war too late and in too few numbers to impact events. However, it proved a sufficient design – capable of going toe-to-toe with vaunted German armor. After the war, American tank development slowed and was reduced mostly to modernization of the M26 and component development. The Korean War created a sudden need for armor and provided the impetus for further development. M26s were rushed to the conflict and demonstrated to be decisive against North Korean armor. Nonetheless, the principle role the tank fulfilled was infantry support. In 1951, the M26 was replaced by its improved derivative, the M46. Its final legacy was that of being the foundation of America’s Cold War tank fleet. Contents Introduction………………………………………………………………………………………..1 Chapter 1. Development of the T26 …………………………………………………..………..10 Chapter 2. The M26 in Action in World War II …………...…………………………………40 Chapter 3. The Interwar Period ……………………………………………………………….63 Chapter 4. The M26 in Korea ………………………………………………………………….76 The Invasion………………………………………………………...………77 Intervention…………………………………………………………………81 The M26 Enters the War……………………………………………………85 The M26 in the Anti-Tank Role…………………………………………….87 Chapter 5. -
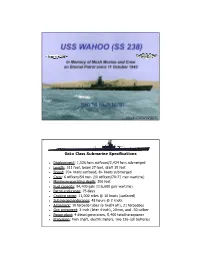
Gato Class Submarine Specifications
1 Prepared by a former Mare Island yardbird, in memory of those who have gone before him 2 Gat o Class Submarine Specificat ions z Displace ment: 1,526 tons surfaced/2,424 tons submerged z Length: 311 feet, beam 27 feet, draft 15 feet z Speed: 20+ knots surfaced, 8+ knots submerged z Crew: 6 officers/54 men (10 officers/70-71 men wartime) z Maximum operating depth: 300 feet z Fuel capacity: 94,400 gals (116,000 gals wartime) z Patrol endurance: 75 days z Cruising range: 11,000 miles @ 10 knots (surfaced) z Submerged endurance: 48 hours @ 2 knots z A rma me nt : 10 torpedo tubes (6 fwd/4 aft), 21 torpedoes z Gun armament: 3-inch (later 4-inch), 20mm, and .50 caliber z Power plant: 4 diesel generators, 5,400 total horsepower z Propulsion: twin shaft, electric motors, two 126-cell batteries 3 Gato Class Internal Arrangement 4 Combat History of USS Wahoo z Seven war patrols z Credited with sinking 27 ships totaling over 125,000 tons z Earned 6 battle stars and awarded a Presidential Unit Citation z Commanded by CDR Dudley W. “Mush” Morton on last five patrols z One of 52 U.S. submar ines lost in WWII z Wahoo and other U.S. submarines completed 1,560 war patrols and sank over 5.6 million tons of Japanese shipping Wahoo patch & battle flag 5 Keel Laying - 28 June 1941 6 Wahoo Pressure Hull Sect ions - 1941 7 Under Construction on Building Way - January 1942 8 Launching Day - 14 February 1942 9 Launching Sponsor - Mrs. -

Shokaku Class, Zuikaku, Soryu, Hiryu
ENGLISH TRANSLATION OF KOJINSHA No.6 ‘WARSHIPS OF THE IMPERIAL JAPANESE NAVY’ SHOKAKU CLASS SORYU HIRYU UNRYU CLASS TAIHO Translators: - Sander Kingsepp Hiroyuki Yamanouchi Yutaka Iwasaki Katsuhiro Uchida Quinn Bracken Translation produced by Allan Parry CONTACT: - [email protected] Special thanks to my good friend Sander Kingsepp for his commitment, support and invaluable translation and editing skills. Thanks also to Jon Parshall for his work on the drafting of this translation. CONTENTS Pages 2 – 68. Translation of Kojinsha publication. Page 69. APPENDIX 1. IJN TAIHO: Tabular Record of Movement" reprinted by permission of the Author, Colonel Robert D. Hackett, USAF (Ret). Copyright 1997-2001. Page 73. APPENDIX 2. IJN aircraft mentioned in the text. By Sander Kingsepp. Page 2. SHOKAKU CLASS The origin of the ships names. Sho-kaku translates as 'Flying Crane'. During the Pacific War, this powerful aircraft carrier and her name became famous throughout the conflict. However, SHOKAKU was actually the third ship given this name which literally means "the crane which floats in the sky" - an appropriate name for an aircraft perhaps, but hardly for the carrier herself! Zui-kaku. In Japan, the crane ('kaku') has been regarded as a lucky bird since ancient times. 'Zui' actually means 'very lucky' or 'auspicious'. ZUIKAKU participated in all major battles except for Midway, being the most active of all IJN carriers. Page 3. 23 August 1941. A near beam photo of SHOKAKU taken at Yokosuka, two weeks after her completion on 8 August. This is one of the few pictures showing her entire length from this side, which was almost 260m. -

Gato Class Boats Finished the War with a Mod 3A Fairwater
A VISUAL GUIDE TO THE U.S. FLEET SUBMARINES PART ONE: GATO CLASS (WITH A TAMBOR/GAR CLASS POSTSCRIPT) 1941-1945 (3rd Edition, 2019) BY DAVID L. JOHNSTON © 2019 The Gato class submarines of the United States Navy in World War II proved to be the leading weapon in the strategic war against the Japanese merchant marine and were also a solid leg of the triad that included their surface and air brethren in the USN’s tactical efforts to destroy the Imperial Japanese Navy. Because of this they have achieved iconic status in the minds of historians. Ironically though, the advancing years since the war, the changing generations, and fading memories of the men that sailed them have led to a situation where photographs, an essential part of understanding history, have gone misidentified which in some cases have led historians to make egregious errors in their texts. A cursory review of photographs of the U.S. fleet submarines of World War II often leaves you with the impression that the boats were nearly identical in appearance. Indeed, the fleet boats from the Porpoise class all the way to the late war Tench class were all similar enough in appearance that it is easy to see how this impression is justified. However, a more detailed examination of the boats will reveal a bewildering array of differences, some of them quite distinct, that allows the separation of the boats into their respective classes. Ironically, the rapidly changing configuration of the boats’ appearances often makes it difficult to get down to a specific boat identification. -

National Register Off Historic Places Inventory
NPS Form 10-900 War in the Pacific Ship Study OMB No. 1024-0018 (3-82) Federal Agency Nomination Exp. 10-31-64 United States Department of the Interior National Park Service For NPS UM only National Register off Historic Places received Inventory — Nomination Form date entered See instructions in How to Complete National Register Forms Type all entries — complete applicable sections 1. Name historic USS Cod (SS-224) and or common 2. Location street & number North Marginal Drive —— not for publication city, town Cleveland __ vicinity of 035 state Ohio code 39 county Cuyahoga code 3. Classification Category Ownership Status Present Use __ district __ public _X. occupied __ agriculture X museum __ building(s) _X- private __ unoccupied __ commercial __park __ structure __ both __ work in progress z_ educational —— private residence __ site Public Acquisition Accessible __ entertainment __ religious JL_ object __ in process —— yes: restricted __ government __ scientific __ being considered __ yes: unrestricted __ industrial __ transportation __ no __ military —— other: 4. Owner off Property name Cleveland Coordinating Committee for Cod, Inc. street & number 1089 East 9th Street city, town Cleveland __ vicinity of state Ohio 44114 5. Location off Legal Description courthouse, registry of deeds, etc. Department of the Navy street & number Naval Sea Systems Command city, town Washington 8tate DC 20362 6. Representation in Existing Surveys title None has this property been determined eligible? __ yes no date federal state county local depository for survey records city, town state 7. Description Condition Check one Check one __ excellent -_ deteriorated -X unaltered N/Aoriginal site X good __ ruins __ altered ._ moved date __ fair __ unexposed Describe the present and original (if known) physical appearance USS Cod (SS-224) was built by the Electric Boat Company of Groton, Connecticut. -

Rov Investigations of the Dkm U-166 Shipwreck Site to Document the Archaeological and Biological Aspects of the Wreck Site
ROV INVESTIGATIONS OF THE DKM U-166 SHIPWRECK SITE TO DOCUMENT THE ARCHAEOLOGICAL AND BIOLOGICAL ASPECTS OF THE WRECK SITE FINAL PERFORMANCE REPORT NOAA AWARD NO. NA03OAR4600103 Prepared for the NOAA Office of Ocean Exploration By 730 East Kaliste Saloom Road Lafayette, LA 70508 October 2004 Daniel J. Warren Marine Archaeologist/Principle Investigator 730 E. KALISTE SALOOM RD LAFAYETTE, LA 70508 AUTHOR PAGE Daniel Warren Principle Investigator/Marine Archaeologist C & C Technologies, Inc. Robert Church Co-Principle Investigator/Marine Archaeologist C & C Technologies, Inc. Dr. Roy Cullimore Co-Principle Investigator/Senior Microbiologist Droycon Bioconcepts, Inc. Lori Johnston Field Microbiologist Droycon Bioconcepts, Inc. 730 E. KALISTE SALOOM RD LAFAYETTE, LA 70508 Author's Note The DKM U-166 and the S.S. Robert E. Lee are recognized war graves and irreplaceable pieces of the world's maritime heritage. Therefore, all coordinates and block numbers have been excluded from this report in an effort to protect the integrity of the wreck sites. 730 E. KALISTE SALOOM RD LAFAYETTE, LA 70508 ABSTRACT In October 2003, investigations were undertaken by C & C Technologies Inc., in conjunction with the NOAA Office of Ocean Exploration, Droycon Bioconcepts, Inc. and the PAST Foundation, to document the wreck site of the DKM U-166 in 5,000 feet of water in the Mississippi Canyon Area of the Gulf of Mexico. At the time, the project was the deepest archaeological investigation ever conducted in the Gulf of Mexico. This project marked one of the first instances that positioning technology that is routinely used in the offshore oil and gas industry was utilized on a deepwater archaeological investigation of a shipwreck.