Title Envisioning Emergent Behaviors of Socio-Technical Systems Based
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Jeweltex Manufacturing Inc., Retirement Plan, Et Al. V. The
Case 1:19-cv-02020-WFK-PK Document 1 Filed 04/08/19 Page 1 of 41 PageID #: 1 UNITED STATES DISTRICT COURT EASTERN DISTRICT OF NEW YORK _________________________________________ ) JEWELTEX MANUFACTURING INC., ) CASE NO. RETIREMENT PLAN, Individually and On ) Behalf of All Others Similarly Situated, ) ) Plaintiff, ) CLASS ACTION COMPLAINT ) vs. ) ) JURY TRIAL DEMANDED THE BOEING COMPANY, DENNIS A. ) MUILENBURG, ROBERT A. BRADWAY, ) DAVID L. CALHOUN, ARTHUR D. COLLINS, ) JR., KENNETH M. DUBERSTEIN, ADMIRAL ) EDMUND P. GIAMBASTIANI, JR., LYNN J. ) GOOD, NIKKI R. HALEY, LAWRENCE W. ) KELLNER, CAROLINE B. KENNEDY, ) EDWARD M. LIDDY, SUSAN C. SCHWAB, ) RONALD A. WILLIAMS, and MIKE S. ) ZAFIROVSKI, ) ) Defendants. ) _________________________________________ Plaintiff Jeweltex Manufacturing Inc., Retirement Plan (“Plaintiff”), by and through its undersigned attorneys, alleges the following based upon information and belief, except as to those allegations concerning Plaintiff, which are alleged upon personal knowledge. Plaintiff’s information and belief is based upon, among other things, the investigation conducted by his counsel which included, among other things: (a) a review and analysis of regulatory filings of The Boeing Company (“Boeing” or the “Company”) filed with the United States Securities and Exchange Commission (“SEC”); (b) a review and analysis of press releases and media reports issued and disseminated by Boeing; (c) a review of other publicly available information concerning Boeing, including articles in the news media and analyst reports; (d) a review and analysis of regulatory investigations and reports; and (e) complaints and related materials in litigation commenced against some or all of the Defendants Case 1:19-cv-02020-WFK-PK Document 1 Filed 04/08/19 Page 2 of 41 PageID #: 2 pertaining to Boeing and the fatal accidents involving the 737 Max series of aircraft (the “737 Max Accidents”) and their causes and aftermath. -

In the Court of Chancery of the State of Delaware
IN THE COURT OF CHANCERY OF THE STATE OF DELAWARE THOMAS P. DiNAPOLI, COMPTROLLER OF THE STATE OF NEW YORK, AS ADMINISTRATIVE PUBLIC VERSION HEAD OF THE NEW YORK STATE FILED ON: June 30, 2020 AND LOCAL RETIREMENT SYSTEM, AND AS TRUSTEE FOR THE NEW YORK STATE COMMON RETIREMENT FUND, and FIRE AND POLICE PENSION ASSOCIATION OF COLORADO, Plaintiffs, v. C.A. No. 2020-0465-AGB KENNETH M. DUBERSTEIN, MIKE S. ZAFIROVSKI, ARTHUR D. COLLINS JR., EDWARD M. LIDDY, ADMIRAL EDMUND P. GIAMBASTIANI JR., DAVID L. CALHOUN, SUSAN C. SCHWAB, RONALD A. WILLIAMS, LAWRENCE W. KELLNER, LYNN J. GOOD, ROBERT A. BRADWAY, RANDALL L. STEPHENSON, CAROLINE B. KENNEDY, W. JAMES MCNERNEY JR., DENNIS A. MUILENBURG, KEVIN G. MCALLISTER, RAYMOND L. CONNER, GREG SMITH, J. MICHAEL LUTTIG, GREG HYSLOP, and DIANA L. SANDS, Defendants. and THE BOEING COMPANY, Nominal Defendant. VERIFIED STOCKHOLDER DERIVATIVE COMPLAINT {FG-W0467081.} Plaintiffs Thomas P. DiNapoli, Comptroller of the State of New York, as Administrative Head of the New York State and Local Retirement System, and as Trustee of the New York State Common Retirement Fund, and Fire and Police Pension Association of Colorado, stockholders of The Boeing Company (“Boeing,” the “Company,” or “Nominal Defendant”), bring this action on Boeing’s behalf against the current and former officers and directors identified below (collectively, “Defendants”) arising from their failure to monitor the safety of Boeing’s 737 MAX airplanes. The allegations in this Complaint are based on the knowledge of Plaintiffs as to themselves, and on information and belief, including the review of publicly available information and documents obtained under 8 Del. -
What Happened, and What Now?
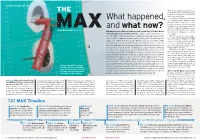
BOEING 737 MAX REPORT THE 737]. So they did it, and did not even know what the aircraft was going to be like because they were so focused on the all-new single-aisle.” What happened, Ironically, the A320neo was launched as a defensive move. Airbus leaders wanted to blunt the threat to the A320 from the C Series, the cutting-edge Bombardier aircraft program launched and what now? in 2008 with Pratt & Whitney geared MAXSean Broderick Washington turbofan engines. Even they had no Mid-August marked five months since the last Boeing 737 MAX fleet’s idea the Neo would generate so many revenue flight and customer delivery as well as—most significantly—its new orders. second fatal accident. While Boeing is making progress on changes need- “The Neo’s success in the market- ed to convince regulators that the latest iteration of its venerable narrow- place did point out unmistakably that customers would embrace a lower body is safe to fly, the timing remains fluid. The road ahead is littered with amount of capability quickly,” McNer- unanswered questions. As for how one of the industry’s most successful ney reflected in 2012. “So that was a and best-selling models ended up grounded less than two years after en- factor. We added it all up and decided tering service, more is known. Following is a recap of how the MAX got to move with the MAX.” here, where it is headed, and—to the extent known—what comes next. The birth of the MAX took even its Some key issues related to the MAX crisis are not covered in detail. -
Summary of the FAA's Review of the Boeing 737
Summary of the FAA’s Review of the Boeing 737 MAX Summary of the FAA’s Review of the Boeing 737 MAX Return to Service of the Boeing 737 MAX Aircraft Date: November 18, 2020 Summary of the FAA’s Review of the Boeing 737 MAX This page intentionally left blank. 1 Summary of the FAA’s Review of the Boeing 737 MAX Table of Contents Executive Summary ............................................................................................ 5 Introduction .................................................................................................... 5 Post-Accident Actions ....................................................................................... 6 Summary of Changes to Aircraft Design and Operation ........................................ 9 Additional Changes Related to the Flight Control Software Update. ...................... 10 Training Enhancements .................................................................................. 11 Compliance Activity ....................................................................................... 12 System Safety Analysis .................................................................................. 13 Return to Service .......................................................................................... 13 Conclusion .................................................................................................... 14 1. Purpose of Final Summary ........................................................................... 15 2. Introduction .............................................................................................. -

Boeing 737 MAX – Still Not Fixed
Boeing 737 MAX – Still Not Fixed Introduction The world has heard the basic explanation given for why two new 737 MAX airplanes crashed killing 346 people. The Angle of Attack (AOA) Sensor sent faulty data to the Maneuvering Characteristics Augmentation System (MCAS) software, which caused the horizontal stabilizers to repeatedly pitch the airplanes down, overwhelming the pilots causing them to lose control. People that have been following these tragedies a little closer know the original, Boeing-installed AOA Sensor on the Lion Air airplane had been replaced the day before the crash. But there is more to the story. Important facts involving the Lion Air Flight 610 and Ethiopian Airlines Flight 302 accident investigations have gone unnoticed leading to many unanswered questions. Several factors appear to have played a direct role in the accidents—specifically, the failure of the AOA Sensors, unexplainable electrical anomalies, and the production of the airplanes—the details of which seem to have been largely ignored. There are at least three other plausible accident scenarios that have not been investigated. Background The Lion Air Final Aircraft Accident Investigation report concluded the replaced AOA Sensor was miscalibrated by 21 degrees and this miscalibration activated MCAS triggering the accident sequence.1 Ethiopia’s Ministry of Transport has not issued their final investigation report or determined the cause of their AOA Sensor failure, although a critical piece of the puzzle seems to exist. Instead they have issued two interim reports and have stated their analysis is still in progress.2 The AOA Sensor is not an algorithm in a piece of software, it is a physical part that weighs approximately three pounds. -

Boeing History Chronology Boeing Red Barn
Boeing History Chronology Boeing Red Barn PRE-1910 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000 2010 Boeing History Chronology PRE-1910 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000 2010 PRE -1910 1910 Los Angeles International Air Meet Museum of Flight Collection HOME PRE-1910 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000 2010 1881 Oct. 1 William Edward Boeing is born in Detroit, Michigan. 1892 April 6 Donald Wills Douglas is born in Brooklyn, New York. 1895 May 8 James Howard “Dutch” Kindelberger is born in Wheeling, West Virginia. 1898 Oct. 26 Lloyd Carlton Stearman is born in Wellsford, Kansas. 1899 April 9 James Smith McDonnell is born in Denver, Colorado. 1903 Dec. 17 Wilbur and Orville Wright make the first successful powered, manned flight in Kitty Hawk, North Carolina. 1905 Dec. 24 Howard Robard Hughes Jr. is born in Houston, Texas. 1907 Jan. 28 Elrey Borge Jeppesen is born in Lake Charles, Louisiana. HOME PRE-1910 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000 2010 1910 s Boeing Model 1 B & W seaplane HOME PRE-1910 1910 1920 1930 1940 1950 1960 1970 1980 1990 2000 2010 1910 January Timber baron William E. Boeing attends the first Los Angeles International Air Meet and develops a passion for aviation. March 10 William Boeing buys yacht customer Edward Heath’s shipyard on the Duwamish River in Seattle. The facility will later become his first airplane factory. 1914 May Donald W. Douglas obtains his Bachelor of Science degree from the Massachusetts Institute of Technology (MIT), finishing the four-year course in only two years. -

Boeing Will Never Forget the 346 Victims of the Lion Air Flight 610 and Ethiopian Airlines Flight 302 Accidents. Their Memorie
Boeing will never forget the 346 victims of the Lion Air Flight 610 and Ethiopian Airlines Flight 302 accidents. Their memories underpin our commitments to our core values of safety, quality and integrity. In November 2020, the U.S. Federal Aviation Administration (FAA) lifted the order grounding the 737-8 and 737-9. The FAA validated that once new software was loaded and other defined steps were completed, the airplanes would be safe and ready to fly. The announcement followed a comprehensive, robust and transparent certification process over 20 months. Our Boeing teams continue to work closely with global regulators and customers, and our employees are deeply committed to the safe operation of the worldwide 737 fleet. As we focus on supporting our customers in safely returning their fleets to service, we are pleased with the confidence our customers have placed in us and the airplane. Based on key lessons learned, we implemented a series of meaningful changes to strengthen our safety practices and culture and bring lasting improvements to aviation safety. We acknowledged where we fell short of our values and expectations, and we reaffirmed the critical obligation to be transparent with our regulators and stakeholders. Our committed and talented engineering workforce came together to form a single organization focused on continuous engineering skill development and knowledge sharing, common processes and digital systems, and rapid deployment of technical expertise from across the enterprise to address any challenges that arise. We created a dedicated Product & Services Safety organization, began implementing an enterprise Safety Management System and deployed global training to every single employee of the company to strengthen our positive safety culture and recommit to our values. -

In the Court of Chancery of the State of Delaware in Re
IN THE COURT OF CHANCERY OF THE STATE OF DELAWARE IN RE THE BOEING COMPANY ) C.A. No. 2019-0907-MTZ DERIVATIVE LITIGATION ) MEMORANDUM OPINION Date Submitted: June 25, 2021 Date Decided: September 7, 2021 Joel Friedlander, Jeffrey M. Gorris, and Christopher M. Foulds, FRIEDLANDER & GORRIS, P.A., Wilmington, Delaware; Richard M. Heimann and Katherine Lubin Benson, LIEFF CABRASER HEIMANN & BERNSTEIN, LLP, San Francisco, California; Steven E. Fineman, Nicholas Diamond, Sean Petterson, Rhea Ghosh, and Kartik S. Madiraju, LIEFF CABRASER HEIMANN & BERNSTEIN, LLP, New York, New York, Attorneys for Co-Lead Plaintiffs. Blake Rohrbacher, Kevin M. Gallagher, and Ryan D. Konstanzer, RICHARDS, LAYTON & FINGER, P.A., Wilmington, Delaware; Joshua Z. Rabinovitz, KIRKLAND & ELLIS LLP, Chicago, Illinois, Attorneys for Defendants and Nominal Defendant The Boeing Company. ZURN, Vice Chancellor. A 737 MAX airplane manufactured by The Boeing Company (“Boeing” or the “Company”) crashed in October 2018, killing everyone onboard; a second one crashed in March 2019, to the same result. Those tragedies have led to numerous investigations and proceedings in multiple regulatory and judicial arenas to find out what went wrong and who is responsible. Those investigations have revealed that the 737 MAX tended to pitch up due to its engine placement; that a new software program designed to adjust the plane downward depended on a single faulty sensor and therefore activated too readily; and that the software program was insufficiently explained to pilots and regulators. In both crashes, the software directed the plane down. The primary victims of the crashes are, of course, the deceased, their families, and their loved ones. -

Committee on Transportation and Infrastructure U.S. House of Representatives Washington, DC 20515 Peter A
Committee on Transportation and Infrastructure U.S. House of Representatives Washington, DC 20515 Peter A. DeFazio Sam Graves Chairman Ranking Member ——— ——— Katherine W. Dedrick, Staff Director Paul J. Sass, Republican Staff Director June 14, 2019 SUMMARY OF SUBJECT MATTER TO: Members, Subcommittee on Aviation FROM: Staff, Subcommittee on Aviation RE: Subcommittee Hearing on “Status of the Boeing 737 MAX: Stakeholder Perspectives” PURPOSE The Subcommittee on Aviation will meet on Wednesday, June 19, 2019, at 10:00 a.m. in 2167 Rayburn House Office Building to hold an hearing titled, “Status of the Boeing 737 MAX: Stakeholder Perspectives.” The hearing is intended to gather views and perspectives from aviation stakeholders regarding the Lion Air Flight 610 and Ethiopian Airlines Flight 302 accidents, the resulting international grounding of the Boeing 737 MAX aircraft, and actions needed to ensure the safety of the aircraft before returning them to service. The Subcommittee will hear testimony from Airlines for America, Allied Pilots Association, Association of Flight Attendants-CWA, Captain Chesley (“Sully”) Sullenberger, and Randy Babbitt. BACKGROUND The Federal Aviation Administration’s (FAA) mission is to provide the safest, most efficient aerospace system in the world. According to the FAA, the risk of a fatal commercial aviation accident in the United States has been cut by 95 percent since 1997. There has only been one commercial airline passenger fatality in the United States in more than 90 million flights in the past decade.1 -

DERIVATIVE LITIGATION : Consol. CA No. 2019
EFiled: Feb 05 2021 03:53PM EST Transaction ID 66314557 Case No. 2019-0907-MTZ IN THE COURT OF CHANCERY OF THE STATE OF DELAWARE IN RE THE BOEING COMPANY : DERIVATIVE LITIGATION : Consol. C.A. No. 2019-0907-MTZ VERIFIED AMENDED CONSOLIDATED COMPLAINT Co-Lead Plaintiffs Thomas P. DiNapoli, Comptroller of the State of New York, as Administrative Head of the New York State and Local Retirement System, and as Trustee of the New York State Common Retirement Fund, and Fire and Police Pension Association of Colorado, stockholders of The Boeing Company (“Boeing,” the “Company,” or “Nominal Defendant”), bring this action on Boeing’s behalf against the current and former officers and directors identified below (collectively, “Defendants”) arising from their failure to monitor the safety of Boeing’s 737 MAX airplanes. The allegations in this Verified Amended Consolidated Complaint (“Complaint”) are based on the knowledge of Co-Lead Plaintiffs as to themselves, and on information and belief, including the review of publicly available information and documents obtained under 8 Del. C. § 220,1 as to all other matters. 1 Plaintiffs received over 44,100 documents totaling over 630,000 pages. It is reasonable to infer that exculpatory information not reflected in the document production does not exist. See Teamsters Local 443 Health Serv’s & Ins. Plan v. Chou, C.A. No. 2019-0816-SG, 2020 WL 5028065, at *24 n.314 (Del. Ch. Aug. 24, 2020). {FG-W0476046.} NATURE OF THE ACTION 1. In 1996, Chancellor Allen issued his famous opinion in In re Caremark International -

Aviation Week & Space Technology
STARTS AFTER PAGE 34 Boeing’s 787 Aircraft Production Building a Hydrogen Quality Misses Is It Still Too High? Infrastructure ™ RICH MEDIA EXCLUSIVE $14.95 SEPTEMBER 14-27, 2020 BEYOND THE MQ-9 Digital Edition Copyright Notice The content contained in this digital edition (“Digital Material”), as well as its selection and arrangement, is owned by Informa. and its affiliated companies, licensors, and suppliers, and is protected by their respective copyright, trademark and other proprietary rights. Upon payment of the subscription price, if applicable, you are hereby authorized to view, download, copy, and print Digital Material solely for your own personal, non-commercial use, provided that by doing any of the foregoing, you acknowledge that (i) you do not and will not acquire any ownership rights of any kind in the Digital Material or any portion thereof, (ii) you must preserve all copyright and other proprietary notices included in any downloaded Digital Material, and (iii) you must comply in all respects with the use restrictions set forth below and in the Informa Privacy Policy and the Informa Terms of Use (the “Use Restrictions”), each of which is hereby incorporated by reference. Any use not in accordance with, and any failure to comply fully with, the Use Restrictions is expressly prohibited by law, and may result in severe civil and criminal penalties. Violators will be prosecuted to the maximum possible extent. You may not modify, publish, license, transmit (including by way of email, facsimile or other electronic means), transfer, sell, reproduce (including by copying or posting on any network computer), create derivative works from, display, store, or in any way exploit, broadcast, disseminate or distribute, in any format or media of any kind, any of the Digital Material, in whole or in part, without the express prior written consent of Informa. -

Knkt.18.10.35.04
KOMITE NASIONAL KESELAMATAN TRANSPORTASI REPUBLIC OF INDONESIA FINAL KNKT.18.10.35.04 Aircraft Accident Investigation Report PT. Lion Mentari Airlines Boeing 737-8 (MAX); PK-LQP Tanjung Karawang, West Java Republic of Indonesia 29 October 2018 2019 This Final Report is published by the Komite Nasional Keselamatan Transportasi (KNKT), Transportation Building, 3rd Floor, Jalan Medan Merdeka Timur No. 5 Jakarta 10110, Indonesia. The report is based upon the investigation carried out by the KNKT in accordance with Annex 13 to the Convention on International Civil Aviation, the Indonesian Aviation Act (UU No. 1/2009) and Government Regulation (PP No. 62/2013). Readers are advised that the KNKT investigates for the sole purpose of enhancing aviation safety. Consequently, the KNKT reports are confined to matters of safety significance and may be misleading if used for any other purpose. As the KNKT believes that safety information is of greatest value if it is passed on for the use of others, readers are encouraged to copy or reprint for further distribution, acknowledging the KNKT as the source. When the KNKT makes recommendations as a result of its investigations or research, safety is its primary consideration. However, the KNKT fully recognizes that the implementation of recommendations arising from its investigations will in some cases incur a cost to the industry. Readers should note that the information in KNKT reports and recommendations is provided to promote aviation safety. In no case is it intended to imply blame or liability. Jakarta, October 2019 KOMITE NASIONAL KESELAMATAN TRANSPORTASI CHAIRMAN SOERJANTO TJAHJONO Dedicated to those who lost their lives in this accident, their families and relatives their sacrifice will not be in vain they will be forever be missed and never forgotten i to our beloved teacher, colleague and friend Prof.