The Wouse: a Wearable Wince Detector to Stop Assistive Robots
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

STYLE GUIDE Irobot Style Guide CONTENTS
STYLE GUIDE iRobot Style Guide CONTENTS Corporate Identifier: Usage & Clear Space 01 Product Logo Lock Ups & Clear Space: For Home 02 Product Logo Lock Ups: For Home 03 Product Logo Lock Ups & Clear Space: For Government 04 Product Logo Lock Ups: For Government 05 Product Logo Lock Ups: Software 06 Logo DON’Ts 07 Minimum Display Size 08 Color Palette: For Home 09 Color Palette: For Government 10 Typefaces 11 Photography: For Home 12 Photography DON’Ts: For Home 13 Photography: For Government 14 Photography DON’Ts: For Government 15 Introduction to Graphic Treatment 16 Graphic Treatment: For Home 17 Graphic Treatment DON’Ts: For Home 18 Graphic Application: For Corporation 19 Graphic Application: For Home 20 Graphic Treatment and Application: For Government 21 Tone 22 iROBOT STYLE GUIDE CORPORATE IDENTIFIER: Usage & Clear Space 1 USAGE CORPORATE LOGO PMS 356 The logo is the core of the visual identity for iRobot. It consists of a single-colored logotype. To reinforce iRobot’s excitement brand personality, the green ( PMS 356 ) is used as a corporate color. Whenever possible, the iRobot logo should be used with the corporate color, PMS 356. If it is not possible to use the corporate color, then a solid black or white (when displayed on a dark background) are the only other color options. The logo should never be displayed in any other color, or in any screened percentages of the approved logo colors. BLACK LOGO ON WHITE These logos are available under the Marketing Communications 100% Black header on the intranet: www.hq.irobot.com CLEAR SPACE Space surrounding the corporate identifier should always be clear of other visual elements in order to give visual prominence and WHITE LOGO ON COLOR maintain the integrity and legibility of the logo. -

Robotics Irobot Corp. (IRBT)
Robotics This report is published for educational purposes only by students competing in the Boston Security Analysts Society (BSAS) Boston Investment iRobot Corp. (IRBT) Research Challenge. 12/13/2010 Ticker: IRBT Recommendation: Sell Price: $22.84 Price Target: $15.20-16.60 Market Profile Figure 1.1: iRobot historical stock price Shares O/S 25 mm 25 Current price $22.84 52 wk price range $14.45-$23.00 20 Beta 1.86 iRobot 3 mo ADTV 0.14 mm 15 Short interest 2.1 mm Market cap $581mm 10 Debt 0 S & P 500 (benchmarked Jan-09) P/10E 25.2x 5 EV/10 EBITDA 13.5x Instl holdings 57.8% 0 Jan-09 Apr-09 Jul-09 Oct-09 Jan-10 Apr-10 Jul-10 Oct-10 Insider holdings 12.5% Valuation Ranges iRobot is a SELL: The company’s high valuation reflects overly optimistic expectations for home and military robot sales. While we are bullish on robotics, iRobot’s 52 wk range growth story has run out of steam. • Consensus is overestimating future home robot sales: Rapid yoy growth in 2010 home robot Street targets sales is the result of one-time penetration of international markets, which has concealed declining domestic sales. Entry into new markets drove growth in home robot sales in Q4 2009 and Q1 2010, 20-25x P/2011E but international sales have fallen 4% since Q1 this year, and we believe the street is overestimating international growth in 2011 (30% vs. our estimate of 18%). Domestic sales were down 29% in 8-12x Terminal 2009 and are up only 2.5% ytd. -

Packaging Specifications and Design
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 4: Packaging Specifications and Design Team Code Name: 2D-MPR Group No. 12 Team Member Completing This Homework: Tyler Neuenschwander E-mail Address of Team Member: tcneuens@ purdue.edu NOTE: This is the first in a series of four “design component” homework assignments, each of which is to be completed by one team member. The body of the report should be 3-5 pages, not including this cover page, references, attachments or appendices. Evaluation: SCORE DESCRIPTION Excellent – among the best papers submitted for this assignment. Very few 10 corrections needed for version submitted in Final Report. Very good – all requirements aptly met. Minor additions/corrections needed for 9 version submitted in Final Report. Good – all requirements considered and addressed. Several noteworthy 8 additions/corrections needed for version submitted in Final Report. Average – all requirements basically met, but some revisions in content should 7 be made for the version submitted in the Final Report. Marginal – all requirements met at a nominal level. Significant revisions in 6 content should be made for the version submitted in the Final Report. Below the passing threshold – major revisions required to meet report * requirements at a nominal level. Revise and resubmit. * Resubmissions are due within one week of the date of return, and will be awarded a score of “6” provided all report requirements have been met at a nominal level. Comments: Comments from the grader will be inserted here. ECE 477 Digital Systems Senior Design Project Rev 8/09 1.0 Introduction The 2D-MPR is an autonomous robot designed to collect data required to map a room. -
Irobot: ROBOTS for the HOME
Licensed to: iChapters User CASE 5 iROBOT: ROBOTS FOR THE HOME Robots have been around for a long time. Detroit has appeared on the cover of Popular Science. It was clear used robots for four decades to build cars, and manu- by then that his future lay in inventions. facturers of all kinds of goods use some form of robot- ics to achieve effi ciencies and productivity. But until The Opportunity iRobot brought its battery-powered vacuum cleaner to the market, no one had successfully used robots in In 1990, Brooks and Angle, who by then had be- the home as an appliance. The issue was not whether it come close working partners with their MIT col- was possible to use robots in the home, but could they league Helen Greiner, borrowed from their credit be produced at a price customers would pay. Until the cards and used bank debt to found iRobot in a tiny introduction of Roomba, iRobot’s intelligent vacuum apartment in Somerville, Massachusetts. The goal of cleaner, robots for the home cost tens of thousands of the company was to build robots that would affect dollars. At Roomba’s price point of $$199,199, it was now hhowow peppeopleople llivedived ttheirheir llives.ivese . AtAt tthathaat ttime, no one possiblee ffororor ttheheh aaveragevev rar gee cconsumeronsus meer too aaffordfford to hhaveava e a cocouldoulld coconceivenceie ve ooff a wawwayy tot bbringringn rrobotsoboto s into domes- robot cleanleaean the hohhouse.usu e.. TThathah t inn iitselftssele f is aann iniinterestingteerrests inng titicc lilifefe iinn aan aaffordableffforordad blle wwaway,y, aandndd iiRobotRoR bob t was still years story, bututt eevenveen mommorerer iinterestingnteresestitingg iiss ththehe eneentrepreneurialnttrepepreenen ururiiaal awawayayy ffromroom didiscoveringsscoovverrini g ththee oononee aapapplicationppliccatiio that would journey of Colin Angle and his company, iRobot. -

Irobot Create 2 Tethered Driving Using Serial Communication and Python Nick Saxton April 2, 2015
iRobot Create 2 Tethered Driving Using Serial Communication and Python Nick Saxton April 2, 2015 Executive Summary: This application note will detail the necessary steps to write a simple Python script to control an iRobot Create 2 through serial port communication. Following an introduction to the topic and the technology used, a detailed walkthrough will be provided showing the reader how to write a user controlled tethered driving script. This walkthrough will start with a blank file and show all of the required steps to reach the final script. Additionally, automated driving code will be discussed, including comments on how it is used in the Automated 3D Environment Modeling project sponsored by Dr. Daniel Morris of the Michigan State University 3D Vision Lab1. Keywords: iRobot Create Tethered Driving Serial Communication2 Python Programming 1 Introduction: This section will introduce the technology and concepts used in this application note. First, an overview of the iRobot Create 2 Programmable Robot will be provided. Then, the Python programming language will be examined, including a brief history of the language and some of its key features. Finally, serial port communication will be discussed. Following this introduction, the objective of this application note will be looked at. The iRobot Create 2 Programmable Robot is a fully programmable version of iRobot’s popular Roomba vacuum cleaning robot. It weighs under 8 lbs, measures a little over 13 inches in diameter and approximately 3.5 inches tall, and has a serial port on its top side, accessible after removing the top cover. An image of the Create 2 can be seen below in Figure 1. -

Consumer Robotics: State of the Industry and Public Opinion
Project Number: TP1 IQP SOTA Consumer Robotics: State of the Industry and Public Opinion An Interactive Qualifying Project Report Submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE In partial fulfillment of the requirements for the Degree of Bachelor of Science by David Bernstein Remy Michaud Brian Silvia Robotics Engineering Electrical Engineering Robotics Engineering Class of 2011 Class of 2011 Class of 2011 Date: May 5, 2010 Professor Taskin Padir, Project Advisor 1. Robotics 2. Consumer 3. Robots 1 Table of Contents I ‐ Introduction .......................................................................................................................................... 5 Objective ............................................................................................................................................... 6 Background ........................................................................................................................................... 6 II ‐ Methodology ...................................................................................................................................... 22 Summary of Methodology .................................................................................................................. 23 III Results ‐ ............................................................................................................................................... 28 Primary Survey Results ...................................................................................................................... -

Irobot CORPORATION
Proxy Statement Dear Stockholder: April 10, 2013 You are cordially invited to attend the annual meeting of stockholders of iRobot Corporation to be held at 2:00 p.m., local time, on Wednesday, May 22, 2013 at iRobot Corporation headquarters located at 8 Crosby Drive, Bedford, Massachusetts 01730. At this annual meeting, you will be asked to elect two (2) class II directors for three-year terms, to ratify the appointment of our independent registered public accountants, to cast an advisory vote on the approval of the compensation of our named executive officers, and to consider a shareholder proposal entitled “Proxy Access for Shareholders." The board of directors unanimously recommends that you vote FOR election of the director nominees, FOR ratification of appointment of our independent registered public accountants, FOR approval, on an advisory basis, of the compensation of our named executive officers, and AGAINST the shareholder proposal entitled "Proxy Access for Shareholders." Details regarding the matters to be acted upon at this annual meeting appear in the accompanying proxy statement. Please give this material your careful attention. Whether or not you plan to attend the annual meeting, we urge you to sign and return the enclosed proxy so that your shares will be represented at the annual meeting. If you attend the annual meeting, you may vote in person even if you have previously returned your proxy card. Your prompt cooperation will be greatly appreciated. Very truly yours, COLIN M. ANGLE Chief Executive Officer & Chairman of the Board Proxy iROBOT CORPORATION 8 Crosby Drive Bedford, Massachusetts 01730 Statement (781) 430-3000 NOTICE OF ANNUAL MEETING OF STOCKHOLDERS To Be Held on May 22, 2013 To the Stockholders of iRobot Corporation: The annual meeting of stockholders of iRobot Corporation, a Delaware corporation (the “Company”), will be held on Wednesday, May 22, 2013, at 2:00 p.m., local time, at iRobot Corporation headquarters located at 8 Crosby Drive, Bedford, Massachusetts 01730, for the following purposes: 1. -

1 ROS SEMINAR UNIT 1.3 ROS & People & Rethink Give a Short
ROS SEMINAR UNIT 1.3 ROS & People & Rethink Give a short description of the following organizations and include their contributions to Robotics and ROS. Give References. a. Willow Garage b. iRobot c. Rethink Robotics a. https://en.wikipedia.org/wiki/Willow_Garage Willow Garage hired its first employees in January 2007, Jonathan Stark, Melonee Wise, Curt Meyers, and John Hsu. All four were recruited by Scott Hassan to work on Willow Garage's first projects which included an SUV entrant into the DARPA Grand Challenge and an autonomous solar powered boat for deploying scientific payloads in open oceans.[8] In the Fall of 2008, Eric Berger and Keenan Wyrobek pitched Willow Garage on creating a common hardware (PR1) and software (ROS) platforms and the idea of creating a Personal Robotics Program at Willow Garage[9]. They has previously started the Stanford Personal Robotics Program[10] to build the platform technologies that would enable the personal robotics industry. At Willow Garage they led the development of PR2[11], the common hardware platform for robotics R&D, and ROS[12], the open source robot operating system. https://spectrum.ieee.org/automaton/robotics/robotics-software/the-origin-story-of-ros-the-linux-of- robotics [9] Willow Garage currently has eight spin-offs: Here are four of importance: Industrial Perception Inc. - Acquired by Google in August 2013, IPI had as its broader mission "eyes and brains for industrial robots", focused on new robotic applications in logistics such as autonomous truck unloading. OpenCV - An open source computer vision and machine learning software library built to provide a common infrastructure for computer vision applications and to accelerate the use of machine perception in the commercial products. -

Integrating Irobot-Arduino-Kinect Systems: an Educational Voice and Keyboard Operated Wireless Mobile Robot
International Journal of Scientific Engineering and Technology ISSN : 2277-1581 Volume No. 6, Issue No. 6, PP : 188-192 1 June 2017 Integrating iRobot-Arduino-Kinect Systems: An Educational Voice and Keyboard Operated Wireless Mobile Robot S. I. A. P. Diddeniya1, K. A. S. V. Rathnayake1, H. N. Gunasinghe2, W. K. I. L. Wanniarachchi1* 1Department of Physics, Faculty of Applied Sciences, University of Sri Jayewardenepura, 10250 Sri Lanka 2Department of Mathematics and Computer Science, The Open University of Sri Lanka, 10250 Sri Lanka Corresponding Email: [email protected] Abstract: This paper presents use of iRobot Create different time frames. Siliveru Ramesh et al. proposed a brain- Programmable Robot for real time wireless controlling via computer interface system for a mind controlled robot. The speech and keyboard commands in a domestic environment. system uses Mindwave Headset which is provided by Neurosky Commercial hardware such as iRobot create 2 programmable Technologies and those signals will be transferred by using robot, Kinect V2, Arduino Uno and NRF24L01 radio Bluetooth and uses LabVIEW design software to analyze brain frequency module were used, based on open-source code in the waves [1]. implementation. At the receiver end iRobot programmable Muhammed Zahit et al. proposed a robot controlling system robot was used as the mobile robot. At the transmission end, a with voice commands that takes speech commands to the PC based system was used. The keyboard controlling system is computer by using a microphone and the features are extracted designed to control the directions of the moving robot. In the by using Mel Frequency Cepstral Coefficients algorithms. -
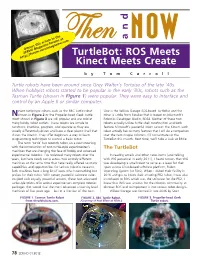
Turtlebot: ROS Meets Kinect Meets Create
Then & Now - Jan 12.qxd 12/5/2011 11:24 AM Page 78 and forums atThen NOW Discuss this article in the SERVO Magazine TurtleBot: ROS Meets http://forum.servomagazine.com Kinect Meets Create by Tom Carroll Turtle robots have been around since Grey Walter’s Tortoise of the late ‘40s. When hobbyist robots started to be popular in the early ‘80s, robots such as the Tasman Turtle (shown in Figure 1) were popular. They were easy to interface and control by an Apple II or similar computer. ewer turtle-type robots such as the BBC Turtle robot One is the Willow Garage ROS-based TurtleBot and the Nshown in Figure 2 or the Propeller-head Geek Turtle other is Eddie from Parallax that is based on Microsoft’s robot shown in Figure 3 are still popular and are sold at Robotics Developer Studio, RDS4. Neither of these two many hobby robot outlets. These robots are simple to robots actually utilize turtle shell construction and both construct, interface, program, and operate as they are feature Microsoft’s powerful vision sensor: the Kinect. Each usually differentially-driven and have a clear plastic shell that robot actually has so many features that I will do a comparison shows the interior. They offer beginners a way to learn over the next couple columns. I’ll concentrate on the programming techniques to control a basic robot. TurtleBot this month. Next time, we’ll take a look at Eddie. The term ‘turtle’ has recently taken on a new meaning with the introduction of two turtle-style experimenter’s The TurtleBot machines that are changing the face of hobby and advanced experimental robotics. -

Irobot Company Brochure-China
A brief introduction of our company Company Overview Milestones Founded in 1990 by Massachusetts Institute of Technology roboticists, including the 2004 2 0 11 2013 company’s Chairman and CEO Colin Angle, iRobot is the leading global consumer • iRobot wins contract • iRobot develops • iRobot launches Our Leadership in the Robotics Industry iRobot, your partner robot company. iRobot has developed some of the world’s most important robots, to develop Small 110 FirstLook®, Roomba® 800 Series, Unmanned Ground a small, light, with revolutionary Since 1990, iRobot has created more than 100 practical robots, and has a rich history steeped in innovation. Its robots have revealed mysteries of the 2001 Vehicle (SUGV). throwable UGV. AeroForce® Performance 2016 Great Pyramid of Giza, found harmful subsea oil in the Gulf of Mexico, and saved • The iRobot 510 Cleaning System. • iRobot launches Braava jet™ earned more than 1000 patents, and assembled one of the world’s for an ideal home • The iRobot PackBot® Mopping Robot. thousands of lives in areas of conflict and crisis around the globe. iRobot inspired 1990 searches at the World PackBot® was • iRobot launches Braava® 2018 • iRobot launches Roomba® i7+ largest robotics IP portfolios. iRobot is a pioneer in the robotics the Micro Rovers used by NASA, changing space travel forever, deployed the ground • MIT roboticists Colin Trade Center after the deployed at the Mopping Robot. • iRobot opens office with Clean Base™ Automatic Angle, Helen Greiner September 11 terrorist Fukushima Daiichi • iRobot launches in Shanghai as its base industry, and it continues to drive innovation, serve as an industry robots for defense and security personnel, brought the self-navigating FDA-approved Dirt Disposal, a robot vacuum and Rodney Brooks attacks. -

Aligning Design of Embodied Interfaces to Learner Goals
Aligning Capabilities of Interactive Educational Tools to Learner Goals Tom Lauwers CMU-RI-TR-10-09 Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Robotics The Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213 Submitted in partial fulfillment of the requirements of the Program for Interdisciplinary Education Research (PIER) Carnegie Mellon University Pittsburgh, Pennsylvania 15213 Thesis Committee: Illah Nourbakhsh, Chair, Carnegie Mellon Robotics Institute Sharon Carver, Carnegie Mellon Psychology Department John Dolan, Carnegie Mellon Robotics Institute, Fred Martin, University of Massachusetts Lowell Computer Science c 2010, Tom Lauwers. ABSTRACT This thesis is about a design process for creating educationally relevant tools. I submit that the key to creating tools that are educationally relevant is to focus on ensuring a high degree of alignment between the designed tool and the broader educational context into which the tool will be integrated. The thesis presents methods and processes for creating a tool that is both well aligned and relevant. The design domain of the thesis is described by a set of tools I refer to as “Configurable Embodied Interfaces”. Configurable embodied interfaces have a number of key features, they: • Can sense their local surroundings through the detection of such environ- mental and physical parameters as light, sound, imagery, device acceleration, etc. • Act on their local environment by outputting sound, light, imagery, motion of the device, etc. • Are configurable in such a way as to link these inputs and outputs in a nearly unlimited number of ways. • Contain active ways for users to either directly create new programs linking input and output, or to easily re-configure them by running different pro- grams on them.