Design and Analysis of a Human Powered Vehicle's
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Australian Adaptive Mountain Biking Guidelines
AUSTRALIAN ADAPTIVE MOUNTAIN BIKING GUIDELINES A detailed guide to help land managers, trail builders, event directors, mountain bike clubs, charities and associations develop inclusive mountain bike trails, events and programs for people with disabilities in Australia. Australian Adaptive Mountain Biking Guidelines AUSTRALIAN ADAPTIVE MOUNTAIN BIKING GUIDELINES Version 1.0.0 Proudly supported and published by: Mountain Bike Australia Queensland Government Acknowledgements: The authors of this document acknowledge the contribution of volunteers in the preparation and development of the document’s content. The authors would also like to extend their gratitude to the following contributors: Denise Cox (Mountain Bike Australia), Talya Wainstein, Clinton Beddall, Richard King, Cameron McGavin and Ivan Svenson (Kalamunda Mountain Bike Collective). Photography by Kerry Halford, Travis Deane, Emily Dimozantos, Matt Devlin and Leanne Rees. Editing and Graphics by Ripe Designs Graphics by Richard Morrell COPYRIGHT 2018: © BREAK THE BOUNDARY INC. This document is copyright protected apart from any use as permitted under the Australian Copyright Act 1968, no part may be reproduced by any process without prior written permission from the Author. Requests and inquiries concerning reproduction should be addressed to the Author at www.breaktheboundary.com Fair-use policy By using this document, the user agrees to this fair-use policy. This document is a paid publication and as such only for use by the said paying person, members and associates of mountain bike and adaptive sporting communities, clubs, groups or associations. Distribution or duplication is strictly prohibited without the written consent of the Author. The license includes online access to the latest revision of this document and resources at no additional cost and can be obtained from: www.breaktheboundary.com Hard copies can be obtained from: www.mtba.asn.au 3 Australian Adaptive Mountain Biking Guidelines Australian Adaptive Mountain Biking Guidelines CONTENTS 1. -
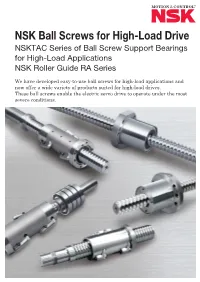
NSK Ball Screws for High-Load Drive NSKTAC Series of Ball Screw Support Bearings for High-Load Applications NSK Roller Guide RA Series
NSK Ball Screws for High-Load Drive NSKTAC Series of Ball Screw Support Bearings for High-Load Applications NSK Roller Guide RA Series We have developed easy-to-use ball screws for high-load applications and now offer a wide variety of products suited for high-load drives. These ball screws enable the electric servo drive to operate under the most severe conditions. NSK Ball Screws for High-Load Drive Lineup of NSK Ball Screws HTF-SRC Type P13 for High-Load Drive Enables a maximum speed of 930 … mm/s with fine screw leads. P16 Best suited design for high-load applications The best arrangement of the ball recirculation circuits and use of the largest possible ball have significantly contributed to the enhancement of high-load HTF-SRD Type P17 bearing characteristics. (Refer to pages 6 and 7 for details.) Enables a maximum speed of 1 600 … mm/s with coarse screw leads. P20 Equipped with Grease Retaining A1 Seals P21 … Optimized design of A1 seal enables P26 Large superior grease retaining performance. HTF-SRD HTF-ASRC Type HTF-ASRD Type HTF-ASRD HTF-SRE HTF-SRE Type P27 … To speed up large machinery. P28 Lead mm HTF-SRC HTF Type P29 HTF Screw diameters of 32 to 200 mm Leads of 10 to 32 mm … HTF-ASRC Provides a wide range of screw P38 diameter and lead combinations. Peripheral products for high-load drive ball screws NSKTAC series of ball screw P39 support bearings … P42 P Small 43 NSK roller guide RA series … Small Shaft dia. mm Large P44 As well as long shafts, a variety of shaft end configurations are available for high torque transmission. -

Road Test: Burley Canto
Issue No. 71 Recumbent Sept./ Oct. 2002 CyclistNews The New ZOX Tandem What’s Inside 2 Editorial License 19 Road Test: Burley Canto 4 Recumbent News 22 Rec-Tech: TerraCycle Fold- Forward Stem 6 Letters 24 On Getting ’Bent 9 Road Test: Penninger Trike 28 Rec-Equipment: Burley Nomad 15 Road Test: Burley Hepcat Trailer Editorial License if it was OK. I then told Jeff about my current test recumbent. Now, Jeff isn’t exactly the world’s biggest recumbent fan. He has a 50-year-old wooden sailboat that he owns (or perhaps owns him) and sails, but he does ride his mountain bike around town for transportation. He likes to tease me about my fleet of weird bikes. But when I we walked into the door of PT Cycles and he saw the Greenspeed GTT tandem tricycle, his eyes lit up. He decided to ride the tandem in the parade with his daughter Emma, who is six. We decided that Jeff needed a GTT piloting course. We rolled the GTT out the door. I told Jeff to hang on, and we were ripping down Water Street. Jeff reminded me that he needed to unlock his Stumpjumper so Amy could ride it home, so I pulled a quick U-turn in the middle of Water Street and headed back into town. Jeff and Emma Kelety ride the Greenspeed GTT in the Port Townsend Once that duty was taken care of, we took Rhody Parade (photo by Deborah Carroll) a left on Water as we started Jeff on a crash course of Tandem Trike Piloting 101. -

! Ch Ro=~ Check of $2,000
The Recumbent Cyclist 9 S.F. TO L.A. LIGHTNING-FAST On April 28, 1991 Pete Penseyres took the Lightning X-2 slightly furrowed brow. out for a Sunday spin, shattering the San Francisco to Los Angeles HPV record by more than three hours in the Pete was actually shooting for a 17 hour 45 minute time. He process and making a strong would have easily done opening bid for the $5,000 this had he not fallen at a JohnPaulMitchellSystems' stoplight before he could top prize. Pete started his get a foot down to the quad-centuryjaun tat about ground. Occuring early 3:30 a.m. at San Francisco in the ride, the fall dam City Hall and pulled into aged the Kevlar fairing's Los Angeles City Hall at "landing gear" flaps used 9:34 p.m., 18 hours and 4 to put his feet down. This minutes later. The Light forced him to ride most of ning X-2 was equipped for the distance with the the run with a powerful doors flapping wide open Night Sun headlight, and in a decidedly non-aero the heavy battery had to dynamic configuration, at light a tail light and tum least for the one-time 64 signals as well. Riding most m.p.h. X-2. When he fell, of the way on Interstate 5, Pete was penalized 30 Pete pedalled the over minutes for receiving as weight bicycle up Pacheco sistance from a concerned Pass and Tejon Pass to an onlookerfrumored to be a altitude of 4,144 feet, seemingly effortlessly except for a certain "T. -

Richard's 21St Century Bicycl E 'The Best Guide to Bikes and Cycling Ever Book Published' Bike Events
Richard's 21st Century Bicycl e 'The best guide to bikes and cycling ever Book published' Bike Events RICHARD BALLANTINE This book is dedicated to Samuel Joseph Melville, hero. First published 1975 by Pan Books This revised and updated edition first published 2000 by Pan Books an imprint of Macmillan Publishers Ltd 25 Eccleston Place, London SW1W 9NF Basingstoke and Oxford Associated companies throughout the world www.macmillan.com ISBN 0 330 37717 5 Copyright © Richard Ballantine 1975, 1989, 2000 The right of Richard Ballantine to be identified as the author of this work has been asserted by him in accordance with the Copyright, Designs and Patents Act 1988. • All rights reserved. No part of this publication may be reproduced, stored in or introduced into a retrieval system, or transmitted, in any form, or by any means (electronic, mechanical, photocopying, recording or otherwise) without the prior written permission of the publisher. Any person who does any unauthorized act in relation to this publication may be liable to criminal prosecution and civil claims for damages. 1 3 5 7 9 8 6 4 2 A CIP catalogue record for this book is available from the British Library. • Printed and bound in Great Britain by The Bath Press Ltd, Bath This book is sold subject to the condition that it shall nor, by way of trade or otherwise, be lent, re-sold, hired out, or otherwise circulated without the publisher's prior consent in any form of binding or cover other than that in which it is published and without a similar condition including this condition being imposed on the subsequent purchaser. -
Exhibits Profile Please Search Your Product Name by "Ctrl+F" Function.Or Click for Keywords Searching
Exhibits Profile Please search your product name by "Ctrl+F" function.Or click https://code.taitra.online/ for keywords searching. 產品代碼 英文名稱 52 Mineral & Metallurgy 5210 Energy Minerals 521010 Coal 521020 Petroleum 521030 Charcoal 521040 Natural Gas 521050 Industrial Gas 5220 Metallic Ores 522010 Iron Ore 522020 Copper Ore 522030 Aluminum Ore 522040 Manganese Ore 522050 Titanium Ore 522060 Zirconium Ore 522070 Gold Ore 522099 Other Metallic Ore 5230 Non-Metallic Minerals 523005 Graphite 523010 Sulfur 523015 Sea Salt 523020 Fluorite 523025 Limestone 523030 Dolomite 523035 Quartz 523040 Feldspar 523045 Mica 523050 Talc 523055 Kaolin 523060 Bentonite 523065 Gypsum 523070 Clay 802570 Other Water Sports 523099 Other Non-Metallic Mineral 5240 Iron & Steel 524005 Billet & Slab 524010 Steel Bar & Rebar 524015 Wire Rod, Iron & Steel Wire 524020 Steel Sheet & Profile 524025 Steel Pipe & Tube 524030 Wire Rope 524035 Steel Coil & Strip 524040 Steel Rail 524045 Iron Pipe 524050 Ferro Alloy 524055 Wire Mesh 524060 Scrap Metal 5250 Non-ferrous Metals 525005 Ingot 525010 Aluminum Sheet 525015 Aluminum Bar & Tube 525020 Aluminum Extrusion 產品代碼 英文名稱 525025 Copper Sheet 525030 Copper Bar & Tube 525035 Titanium Sheet 525040 Titanium Bar & Tube 525045 Non-ferrous Wire 525050 Electromagnet / Solenoid 525055 Permanent Magnet 525060 Rare Earth 525099 Other Non-ferrous Metals 53 Chemicals 5305 Organic Chemicals 530510 Amine 530520 Aldehyde, Ketone & Chinone 530530 Organic Acid 530540 Alcohol, Hydroxybenzene & Ether 530550 Benzene & Derivatives 530560 Hydrocarbon -

Rolled Rotary Ball Screw
511E Rolled Rotary Ball Screw Model BLR End cap Screw shaft Spacer Ball Seal Collar End cap Outer ring Ball screw nut Retainer Outer ring Ball Fig.1 Structure of Large Lead Rotary Nut Ball Screw Model BLR Point of Selection A15-8 Options A 15-336 Model No. A 15-353 Precautions on Use A 15-358 Accessories for Lubrication A 24-1 Mounting Procedure and Maintenance B 15-104 Accuracy Standards A 15-290 Example of Assembly A 15-291 Axial Clearance A 15-19 Maximum Length of the Screw Shaft A 15-24 DN Value A 15-33 A15-288 511E Rolled Rotary Ball Screw Structure and Features The Rotary Ball Screw is a rotary-nut ball screw unit that has an integrated structure consisting of a ball screw nut and a support bearing. The support bearing is an angular bearing that has a contact angle of 60, contains an increased number of balls and achieves a large axial rigidity. Model BLR is divided into two types: the Precision Ball Screw and the Rolled Screw Ball. [ Smooth Motion] It achieves smoother motion than rack-and-pinion based straight motion. [ Low Noise even in High-speed Rotation] Model BLR produces very low noise when the balls are picked up along the end cap. In addition, the balls circulate by passing through the ball screw nut, allowing this model to be used at high speed. [ High Rigidity] The support bearing of this model is larger than that of the screw shaft rotational type. Thus, its axial rigidity is signifi cantly increased. -
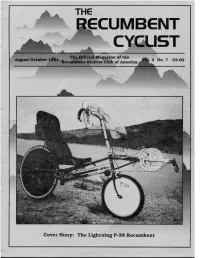
The Lightning P-38 Recumbent 2 the Recumbent Cyclist the LIGHTNING P-38 RECUMBENT by Robert J
Cover Story: The Lightning P-38 Recumbent 2 The Recumbent Cyclist THE LIGHTNING P-38 RECUMBENT by Robert J. Bryant When the subject of high performance recumbents is waterbottle mounts, a pump peg and dropout eyelets. The presented, the Lightning P-38 is sure to come to mind. Lightning's paint is among the finest found on any recum- Considering all of the recumbents currently marketed in bent. It is electrostatic baked on urethane powder and the USA only a few are really built for performance and comes in red, or royal blue. This finish is extremely durable only two designs really have the speed records to back up and looks great. We have found powdercoat much more the claims. These qualities are not an after thought with durable than lmron, but not as glossy a finish. The the Lightning, but the purpose in which the bike is de- difference becomes apparent when the bike is a year or so signed. It is apparent through our interviews with RBCA old and the Powdercoat still looks new. The new aluminum member/ Lightning owners that they know what they want seat frame is anodized silver and much lighter than the in a recumbent bicycle. Lightning owners seem to be previous chro-molly seat frame. among the most loyal owners of any brand of recumbent that we've tested. When Tim shipped the test bike he also included some of Lightning's new custom cast lugs. The lugs were part of the AEROSPACE BEGINNINGS new seat design. The heat treated anodized aluminum Tim Brummer and Company build the Lightnings in seat bolts onto the lugs at the frame and to the seat stays Lompoc California. -

January 2021 - Diy Plans Catalog
JANUARY 2021 - DIY PLANS CATALOG Anyone Can Do This! Our DIY Plans detail every aspect of the building process using easy to follow instructions with high resolution pictures and diagrams. Even if this is your first attempt at building something yourself, you will be able to succeed with our plans, as no previous expertise is assumed. Detailed Plans – Instant Download! We use real build photos and detailed diagrams instead of complex drawings, so anyone with a desire to build can succeed. Our bike and trike plans are not engineering blueprints, and do not call for hard-to-find parts or expensive tools. DIY Means Building Yourself a Better Life. Unleash your creativity, and turn your drawing board ideas into reality. You don't need a fancy garage full of tools or an unlimited budget to build anything shown on our DIY site, you just need the desire to do it yourself. Take pride in your home built projects, and create something completely unique from nothing more than recycled parts. AURORA DIY SUSPENSION TRIKE PLAN The Aurora Delta Recumbent Trike merges speed, handling, and comfort into one great looking ride! With under seat steering, and rear suspension, you will be enjoying your laid-back country cruises in pure comfort and style. Of course, The Aurora DIY Trike is also a hot performer, and will get you around as fast as your leg powered engine feels like working. This DIY Plan Contains 198 Pages and 203 Photos. Click above for more information. WARRIOR LOW RACER TADPOLE TRIKE PLAN The Warrior is one fast and great looking DIY Tadpole Trike that you can make using only basic tools and parts. -

Worm Gear Screw Jacks Reliable and Versatile High Performance Screw Jacks
Worm Gear Screw Jacks Reliable and versatile high performance screw jacks www.thomsonlinear.com Thomson – the Choice for Optimized Motion Solutions Often the ideal design solution is not about finding the fastest, sturdiest, most accurate or even the least expensive option. Rather, the ideal solution is the optimal balance of performance, life and cost. The Best Positioned Supplier of Mechanical Motion Technology Thomson has several advantages that make us the supplier of choice for motion control technology. • Thomson owns the broadest standard product offering of mechanical motion technologies in the industry. • Modified versions of standard product or white sheet design solutions are routine for us. • Choose Thomson and gain access to over 70 years of global application experience in industries including packaging, factory automation, material handling, medical, clean energy, printing, automotive, machine tool, aerospace and defense. A Name You Can Trust A wealth of product and application information as well as 3D models, software tools, our distributor locator and global contact information is available at www.thomsonlinear.com. For assistance in Europe, contact us at +44 1271 334 500 or e-mail us at [email protected]. Talk to us early in the design process to see how Thomson can help identify the optimal balance of performance, life and cost for your next application. And, call us or any of our 2000+ distribution partners around the world for fast delivery of replacement parts. Local Support Around the Globe Application -

Power Jacks Capability & Product Overview
Capability OUR EXPERTISE HAS BEEN BUILT ON A HISTORY OF MORE THAN 100 YEARS OF ENGINEERING, CRAFTSMANSHIP, VISIONARY DESIGN, QUALITY MANUFACTURE AND CUSTOMER CARE. Power Jacks is a manufacturing/engineering company specialising in the design and manufacture of lifting & positioning solutions for applications in Industrial Automation, Energy, Defence, Transport and the Civil Engineering sectors. Headquartered near Aberdeen in the UK, the company is the UK’s largest screw jack manufacturing facility, that uses the latest engineering technologies to deliver quality products (BS EN ISO 9001:2008) that offer reliability, performance and economy. Power Jacks deliver this high quality service in a safe (OHSAS 18001:2007) and environmentally friendly (ISO 14001:2004) working environment thanks to the highly trained, flexible and motivated teams that work throughout the business driving the company to higher levels of performance. Applications 747 Test Facility - Metal Section Maintenance Lid Lift Straighteners Platform Global Reach POWER JACKS HAS LOCAL REPRESENTATION IN 27 COUNTRIES AND SUPPLIES ITS PRODUCTS TO MORE THAN 80 COUNTRIES WORLDWIDE. A global reach with a local service as we work closely with our customers to ensure the best solution for all their lifting and positioning applications. Headquarters & Factory Local Power Jacks Sales Offices Local Representative www.powerjacks.com Screw Jacks As a leader in the manufacture of mechanical screw jacks, and with over two million products in the field, we guarantee quality, reliability, performance and value. Our screw jacks come in a variety of series designed to meet the challenges of any application. They range from the classic single face screw jack, one of the most widely used and popular screw jacks worldwide and proven in the most demanding linear motion applications, to our high performance screw jack that meet the ever-growing industrial demands placed upon our products. -

Thomson BSA Lead and Ball Screws
Thomson BSA Lead and Ball Screws www.thomsonbsa.com Linear Motion. Optimized. Thomson - Linear Motion. Optimized. Often the ideal design solution is not about finding the fastest, sturdiest, most accurate or even the least expensive option. Rather, the ideal solution is the optimal balance of performance, life and cost. Thomson is best positioned to help you most quickly configure the optimal linear motion solution for your application. • Thomson invented anti-friction linear bearing technology. We own the broadest standard product offering of mechanical motion technologies in the industry. • Modified versions of standard product are routine. White sheet design solutions available across our entire portfolio. • Choose Thomson and gain access to over 70 years of global application experience in diverse industries including packaging, factory automation, material handling, medical, clean energy, printing, automotive, machine tool, aerospace and defense. • As part of Danaher Motion, we are financially strong and unique in our ability to bring together control, drive, motor, power transmission and precision linear motion technologies. Thomson is the name you can trust for quality, innovation, on-time delivery, controlled costs, and reduced risk. In addition to the information contained in this document, a wealth of product and application information is available online at www.thomsonlinear.com. Also online are downloadable 3D models, software tools, our distributor locator and global contact information for Thomson. For immediate assistance in North America contact us at 1-540-633-3549 or email us at [email protected]. Talk to us early in the design process to see how Thomson can help identify the optimal balance of performance, life and cost for your next application.