Robotics Timeline
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Humanoid Robots – from Fiction to Reality?
KI-Zeitschrift, 4/08, pp. 5-9, December 2008 Humanoid Robots { From Fiction to Reality? Sven Behnke Humanoid robots have been fascinating people ever since the invention of robots. They are the embodiment of artificial intelligence. While in science fiction, human-like robots act autonomously in complex human-populated environments, in reality, the capabilities of humanoid robots are quite limited. This article reviews the history of humanoid robots, discusses the state-of-the-art and speculates about future developments in the field. 1 Introduction 1495 Leonardo da Vinci designed and possibly built a mechan- ical device that looked like an armored knight. It was designed Humanoid robots, robots with an anthropomorphic body plan to sit up, wave its arms, and move its head via a flexible neck and human-like senses, are enjoying increasing popularity as re- while opening and closing its jaw. By the eighteenth century, search tool. More and more groups worldwide work on issues like elaborate mechanical dolls were able to write short phrases, play bipedal locomotion, dexterous manipulation, audio-visual per- musical instruments, and perform other simple, life-like acts. ception, human-robot interaction, adaptive control, and learn- In 1921 the word robot was coined by Karel Capek in its ing, targeted for the application in humanoid robots. theatre play: R.U.R. (Rossum's Universal Robots). The me- These efforts are motivated by the vision to create a new chanical servant in the play had a humanoid appearance. The kind of tool: robots that work in close cooperation with hu- first humanoid robot to appear in the movies was Maria in the mans in the same environment that we designed to suit our film Metropolis (Fritz Lang, 1926). -

China's Space Robotic Arm Programs
SITC Bulletin Analysis October 2013 China’s Space Robotic Arm Programs Kevin POLLPETER Deputy Director, Study of Innovation and Technology in China Project UC Institute on Global Conflict and Cooperation On July 20, 2013, China launched three satellites on a Long March 4C launch vehicle, ostensibly to test space debris observation and space robotic arm technologies. The three satellites, Chuangxin-3, Shiyan-7, and Shijian-15, drew the attention of satellite tracking enthusiasts when two of them began conducting orbital maneuvers with each other and an additional satellite that had been launched in 2005. The maneuvers began on August 1 and involved one satellite acting as the target and another satellite, most likely equipped with a robotic arm, grappling the target satellite. Exactly which two of the three satellites were involved in the maneuvers is unknown. Based on data from the U.S. Strategic Command’s Space-Track.org website, however, the largest satellite of the three, possibly the Shijian-15, fired its thrusters to move to the smallest of the three satel- lites, possibly the Chuangxin-3, which remained in a set orbit.1 The third satellite, possibly the Shiyan-7, does not appear to be involved in the test. These maneuvers continued until August 17 and resulted in the largest satellite closing in on and then away from the smallest satellite. On August 18, the largest satellite changed orbits and closed in on a completely separate satellite, the Shijian-7, that had been launched in 2005. These maneuvers have caused concern that the tests go beyond the stated objectives and are actually a cover for testing on-orbit anti-satellite (ASAT) technologies. -

2.1: What Is Robotics? a Robot Is a Programmable Mechanical Device
2.1: What is Robotics? A robot is a programmable mechanical device that can perform tasks and interact with its environment, without the aid of human interaction. Robotics is the science and technology behind the design, manufacturing and application of robots. The word robot was coined by the Czech playwright Karel Capek in 1921. He wrote a play called “Rossum's Universal Robots” that was about a slave class of manufactured human-like servants and their struggle for freedom. The Czech word robota loosely means "compulsive servitude.” The word robotics was first used by the famous science fiction writer, Isaac Asimov, in 1941. 2.1: What is Robotics? Basic Components of a Robot The components of a robot are the body/frame, control system, manipulators, and drivetrain. Body/frame: The body or frame can be of any shape and size. Essentially, the body/frame provides the structure of the robot. Most people are comfortable with human-sized and shaped robots that they have seen in movies, but the majority of actual robots look nothing like humans. Typically, robots are designed more for function than appearance. Control System: The control system of a robot is equivalent to the central nervous system of a human. It coordinates and controls all aspects of the robot. Sensors provide feedback based on the robot’s surroundings, which is then sent to the Central Processing Unit (CPU). The CPU filters this information through the robot’s programming and makes decisions based on logic. The same can be done with a variety of inputs or human commands. -
Robotics Section Guide for Web.Indd
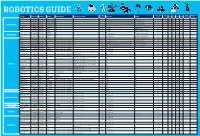
ROBOTICS GUIDE Soldering Teachers Notes Early Higher Hobby/Home The Robot Product Code Description The Brand Assembly Required Tools That May Be Helpful Devices Req Software KS1 KS2 KS3 KS4 Required Available Years Education School VEX 123! 70-6250 CLICK HERE VEX No ✘ None No ✔ ✔ ✔ ✔ Dot 70-1101 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Dash 70-1100 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ ✔ Ready to Go Robot Cue 70-1108 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Codey Rocky 75-0516 CLICK HERE Makeblock No ✘ PC, Laptop Free downloadb ale Mblock Software ✔ ✔ ✔ ✔ Ozobot 70-8200 CLICK HERE Ozobot No ✘ PC, Laptop Free downloads ✔ ✔ ✔ ✔ Ohbot 76-0000 CLICK HERE Ohbot No ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ SoftBank NAO 70-8893 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Humanoid Robots SoftBank Pepper 70-8870 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Ohbot 76-0001 CLICK HERE Ohbot Assembly is part of the fun & learning! ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ FABLE 00-0408 CLICK HERE Shape Robotics Assembly is part of the fun & learning! ✘ PC, Laptop or Ipad Free Downloadable ✔ ✔ ✔ ✔ VEX GO! 70-6311 CLICK HERE VEX Assembly is part of the fun & learning! ✘ Windows, Mac, -

Martine Rothblatt
For more information contact us on: North America 855.414.1034 International +1 646.307.5567 [email protected] Martine Rothblatt Topics Activism and Social Justice, Diversity and Inclusion, Health and Wellness, LGBTQIA+, Lifestyle, Science and Technology Travels From Maryland Bio Martine Rothblatt, Ph.D., MBA, J.D. is one of the most exciting and innovative voices in the world of business, technology, and medicine. She was named by Forbes as one of the "100 Greatest Living Business Minds of the past 100 years" and one of America's Self-Made Women of 2019. After graduating from UCLA with a law and MBA degree, Martine served as President & CEO of Dr. Gerard K. O’Neill’s satellite navigation company, Geostar. The satellite system she launched in 1986 continues to operate today, providing service to certain government agencies. She also created Sirius Satellite Radio in 1990, serving as its Chairman and CEO. In the years that followed, Martine Rothblatt’s daughter was diagnosed with life-threatening pulmonary hypertension. Determined to find a cure, she left the communications business and entered the world of medical biotechnology. She earned her Ph.D. in medical ethics at the Royal London College of Medicine & Dentistry and founded the United Therapeutics Corporation in 1996. The company focuses on the development and commercialization of page 1 / 4 For more information contact us on: North America 855.414.1034 International +1 646.307.5567 [email protected] biotechnology in order to address the unmet medical needs of patients with chronic and life-threatening conditions. Since then, she has become the highest-paid female CEO in America. -

Robotic Manipulators Mechanical Project for the Domestic Robot HERA
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/333931156 Robotic Manipulators Mechanical Project For The Domestic Robot HERA Conference Paper · April 2019 CITATIONS READS 0 197 3 authors: Marina Gonbata Fabrizio Leonardi University Center of FEI University Center of FEI 3 PUBLICATIONS 0 CITATIONS 97 PUBLICATIONS 86 CITATIONS SEE PROFILE SEE PROFILE Plinio Thomaz Aquino Junior University Center of FEI 58 PUBLICATIONS 237 CITATIONS SEE PROFILE Some of the authors of this publication are also working on these related projects: Vehicle Coordination View project HERA: Home Environment Robot Assistant View project All content following this page was uploaded by Plinio Thomaz Aquino Junior on 21 June 2019. The user has requested enhancement of the downloaded file. BRAHUR-BRASERO 2019 II Brazilian Humanoid Robot Workshop and III Brazilian Workshop on Service Robotics Robotic Manipulators Mechanical Project For The Domestic Robot HERA Marina Yukari Gonbata1, Fabrizio Leonardi1 and Plinio Thomaz Aquino Junior1 Abstract— Robotics can ease peoples life, in the industrial that can ”read” the environment where it acts), ability to act and home environment. When talking about homes, robot may actuators and motors capable of producing actions, such as assist people in some domestic and tasks, done in repeat. To the displacement of the robot in the environment), robustness accomplish those tasks, a robot must have a robotic arm, so it can interact with the environment physically, therefore, a robot and intelligence (ability to handle the most diverse situations, must use its arm to do the tasks that are required by its user. in order to solve and perform tasks as complex as they are) [2]. -

Cybernetic Human HRP-4C: a Humanoid Robot with Human-Like Proportions
Cybernetic Human HRP-4C: A humanoid robot with human-like proportions Shuuji KAJITA, Kenji KANEKO, Fumio KANEIRO, Kensuke HARADA, Mitsuharu MORISAWA, Shin’ichiro NAKAOKA, Kanako MIURA, Kiyoshi FUJIWARA, Ee Sian NEO, Isao HARA, Kazuhito YOKOI, Hirohisa HIRUKAWA Abstract Cybernetic human HRP-4C is a humanoid robot whose body dimensions were designed to match the average Japanese young female. In this paper, we ex- plain the aim of the development, realization of human-like shape and dimensions, research to realize human-like motion and interactions using speech recognition. 1 Introduction Cybernetics studies the dynamics of information as a common principle of com- plex systems which have goals or purposes. The systems can be machines, animals or a social systems, therefore, cybernetics is multidiciplinary from its nature. Since Norbert Wiener advocated the concept in his book in 1948[1], the term has widely spreaded into academic and pop culture. At present, cybernetics has diverged into robotics, control theory, artificial intelligence and many other research fields, how- ever, the original unified concept has not yet lost its glory. Robotics is one of the biggest streams that branched out from cybernetics, and its goal is to create a useful system by combining mechanical devices with information technology. From a practical point of view, a robot does not have to be humanoid; nevertheless we believe the concept of cybernetics can justify the research of hu- manoid robots for it can be an effective hub of multidiciplinary research. WABOT-1, -

Fetishism and the Culture of the Automobile
FETISHISM AND THE CULTURE OF THE AUTOMOBILE James Duncan Mackintosh B.A.(hons.), Simon Fraser University, 1985 THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ARTS in the Department of Communication Q~amesMackintosh 1990 SIMON FRASER UNIVERSITY August 1990 All rights reserved. This work may not be reproduced in whole or in part, by photocopy or other means, without permission of the author. APPROVAL NAME : James Duncan Mackintosh DEGREE : Master of Arts (Communication) TITLE OF THESIS: Fetishism and the Culture of the Automobile EXAMINING COMMITTEE: Chairman : Dr. William D. Richards, Jr. \ -1 Dr. Martih Labbu Associate Professor Senior Supervisor Dr. Alison C.M. Beale Assistant Professor \I I Dr. - Jerry Zqlove, Associate Professor, Department of ~n~lish, External Examiner DATE APPROVED : 20 August 1990 PARTIAL COPYRIGHT LICENCE I hereby grant to Simon Fraser University the right to lend my thesis or dissertation (the title of which is shown below) to users of the Simon Fraser University Library, and to make partial or single copies only for such users or in response to a request from the library of any other university, or other educational institution, on its own behalf or for one of its users. I further agree that permission for multiple copying of this thesis for scholarly purposes may be granted by me or the Dean of Graduate Studies. It is understood that copying or publication of this thesis for financial gain shall not be allowed without my written permission. Title of Thesis/Dissertation: Fetishism and the Culture of the Automobile. Author : -re James Duncan Mackintosh name 20 August 1990 date ABSTRACT This thesis explores the notion of fetishism as an appropriate instrument of cultural criticism to investigate the rites and rituals surrounding the automobile. -

Hospitality Robots at Your Service WHITEPAPER
WHITEPAPER Hospitality Robots At Your Service TABLE OF CONTENTS THE SERVICE ROBOT MARKET EXAMPLES OF SERVICE ROBOTS IN THE HOSPITALITY SPACE IN DEPTH WITH SAVIOKE’S HOSPITALITY ROBOTS PEPPER PROVIDES FRIENDLY, FUN CUSTOMER ASSISTANCE SANBOT’S HOSPITALITY ROBOTS AIM FOR HOTELS, BANKING EXPECT MORE ROBOTS DOING SERVICE WORK roboticsbusinessreview.com 2 MOBILE AND HUMANOID ROBOTS INTERACT WITH CUSTOMERS ACROSS THE HOSPITALITY SPACE Improvements in mobility, autonomy and software drive growth in robots that can provide better service for customers and guests in the hospitality space By Ed O’Brien Across the business landscape, robots have entered many different industries, and the service market is no difference. With several applications in the hospitality, restaurant, and healthcare markets, new types of service robots are making life easier for customers and employees. For example, mobile robots can now make deliveries in a hotel, move materials in a hospital, provide security patrols on large campuses, take inventories or interact with retail customers. They offer expanded capabilities that can largely remove humans from having to perform repetitive, tedious, and often unwanted tasks. Companies designing and manufacturing such robots are offering unique approaches to customer service, providing systems to help fill in areas where labor shortages are prevalent, and creating increased revenues by offering new delivery channels, literally and figuratively. However, businesses looking to use these new robots need to be mindful of reviewing the underlying demand to ensure that such investments make sense in the long run. In this report, we will review the different types of robots aimed at providing hospitality services, their various missions, and expectations for growth in the near-to-immediate future. -

PETMAN: a Humanoid Robot for Testing Chemical Protective Clothing
372 日本ロボット学会誌 Vol. 30 No. 4, pp.372~377, 2012 解説 PETMAN: A Humanoid Robot for Testing Chemical Protective Clothing Gabe Nelson∗, Aaron Saunders∗, Neil Neville∗, Ben Swilling∗, Joe Bondaryk∗, Devin Billings∗, Chris Lee∗, Robert Playter∗ and Marc Raibert∗ ∗Boston Dynamics 1. Introduction Petman is an anthropomorphic robot designed to test chemical protective clothing (Fig. 1). Petman will test Individual Protective Equipment (IPE) in an envi- ronmentally controlled test chamber, where it will be exposed to chemical agents as it walks and does basic calisthenics. Chemical sensors embedded in the skin of the robot will measure if, when and where chemi- cal agents are detected within the suit. The robot will perform its tests in a chamber under controlled temper- ature and wind conditions. A treadmill and turntable integrated into the wind tunnel chamber allow for sus- tained walking experiments that can be oriented rela- tive to the wind. Petman’s skin is temperature con- trolled and even sweats in order to simulate physiologic conditions within the suit. When the robot is per- forming tests, a loose fitting Intelligent Safety Harness (ISH) will be present to support or catch and restart the robot should it lose balance or suffer a mechani- cal failure. The integrated system: the robot, chamber, treadmill/turntable, ISH and electrical, mechanical and software systems for testing IPE is called the Individual Protective Ensemble Mannequin System (Fig. 2)andis Fig. 1 The Petman robot walking on a treadmill being built by a team of organizations.† In 2009 when we began the design of Petman,there where the external fixture attaches to the robot. -

History of Robotics: Timeline
History of Robotics: Timeline This history of robotics is intertwined with the histories of technology, science and the basic principle of progress. Technology used in computing, electricity, even pneumatics and hydraulics can all be considered a part of the history of robotics. The timeline presented is therefore far from complete. Robotics currently represents one of mankind’s greatest accomplishments and is the single greatest attempt of mankind to produce an artificial, sentient being. It is only in recent years that manufacturers are making robotics increasingly available and attainable to the general public. The focus of this timeline is to provide the reader with a general overview of robotics (with a focus more on mobile robots) and to give an appreciation for the inventors and innovators in this field who have helped robotics to become what it is today. RobotShop Distribution Inc., 2008 www.robotshop.ca www.robotshop.us Greek Times Some historians affirm that Talos, a giant creature written about in ancient greek literature, was a creature (either a man or a bull) made of bronze, given by Zeus to Europa. [6] According to one version of the myths he was created in Sardinia by Hephaestus on Zeus' command, who gave him to the Cretan king Minos. In another version Talos came to Crete with Zeus to watch over his love Europa, and Minos received him as a gift from her. There are suppositions that his name Talos in the old Cretan language meant the "Sun" and that Zeus was known in Crete by the similar name of Zeus Tallaios. -

Ph. D. Thesis Stable Locomotion of Humanoid Robots Based
Ph. D. Thesis Stable locomotion of humanoid robots based on mass concentrated model Author: Mario Ricardo Arbul´uSaavedra Director: Carlos Balaguer Bernaldo de Quiros, Ph. D. Department of System and Automation Engineering Legan´es, October 2008 i Ph. D. Thesis Stable locomotion of humanoid robots based on mass concentrated model Author: Mario Ricardo Arbul´uSaavedra Director: Carlos Balaguer Bernaldo de Quiros, Ph. D. Signature of the board: Signature President Vocal Vocal Vocal Secretary Rating: Legan´es, de de Contents 1 Introduction 1 1.1 HistoryofRobots........................... 2 1.1.1 Industrialrobotsstory. 2 1.1.2 Servicerobots......................... 4 1.1.3 Science fiction and robots currently . 10 1.2 Walkingrobots ............................ 10 1.2.1 Outline ............................ 10 1.2.2 Themes of legged robots . 13 1.2.3 Alternative mechanisms of locomotion: Wheeled robots, tracked robots, active cords . 15 1.3 Why study legged machines? . 20 1.4 What control mechanisms do humans and animals use? . 25 1.5 What are problems of biped control? . 27 1.6 Features and applications of humanoid robots with biped loco- motion................................. 29 1.7 Objectives............................... 30 1.8 Thesiscontents ............................ 33 2 Humanoid robots 35 2.1 Human evolution to biped locomotion, intelligence and bipedalism 36 2.2 Types of researches on humanoid robots . 37 2.3 Main humanoid robot research projects . 38 2.3.1 The Humanoid Robot at Waseda University . 38 2.3.2 Hondarobots......................... 47 2.3.3 TheHRPproject....................... 51 2.4 Other humanoids . 54 2.4.1 The Johnnie project . 54 2.4.2 The Robonaut project . 55 2.4.3 The COG project .