Intel® Xeon Phi™ Coprocessor System Software Developers Guide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Data Storage the CPU-Memory
Data Storage •Disks • Hard disk (HDD) • Solid state drive (SSD) •Random Access Memory • Dynamic RAM (DRAM) • Static RAM (SRAM) •Registers • %rax, %rbx, ... Sean Barker 1 The CPU-Memory Gap 100,000,000.0 10,000,000.0 Disk 1,000,000.0 100,000.0 SSD Disk seek time 10,000.0 SSD access time 1,000.0 DRAM access time Time (ns) Time 100.0 DRAM SRAM access time CPU cycle time 10.0 Effective CPU cycle time 1.0 0.1 CPU 0.0 1985 1990 1995 2000 2003 2005 2010 2015 Year Sean Barker 2 Caching Smaller, faster, more expensive Cache 8 4 9 10 14 3 memory caches a subset of the blocks Data is copied in block-sized 10 4 transfer units Larger, slower, cheaper memory Memory 0 1 2 3 viewed as par@@oned into “blocks” 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 3 Cache Hit Request: 14 Cache 8 9 14 3 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 4 Cache Miss Request: 12 Cache 8 12 9 14 3 12 Request: 12 Memory 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Sean Barker 5 Locality ¢ Temporal locality: ¢ Spa0al locality: Sean Barker 6 Locality Example (1) sum = 0; for (i = 0; i < n; i++) sum += a[i]; return sum; Sean Barker 7 Locality Example (2) int sum_array_rows(int a[M][N]) { int i, j, sum = 0; for (i = 0; i < M; i++) for (j = 0; j < N; j++) sum += a[i][j]; return sum; } Sean Barker 8 Locality Example (3) int sum_array_cols(int a[M][N]) { int i, j, sum = 0; for (j = 0; j < N; j++) for (i = 0; i < M; i++) sum += a[i][j]; return sum; } Sean Barker 9 The Memory Hierarchy The Memory Hierarchy Smaller On 1 cycle to access CPU Chip Registers Faster Storage Costlier instrs can L1, L2 per byte directly Cache(s) ~10’s of cycles to access access (SRAM) Main memory ~100 cycles to access (DRAM) Larger Slower Flash SSD / Local network ~100 M cycles to access Cheaper Local secondary storage (disk) per byte slower Remote secondary storage than local (tapes, Web servers / Internet) disk to access Sean Barker 10. -
X86 Platform Coprocessor/Prpmc (PC on a PMC)
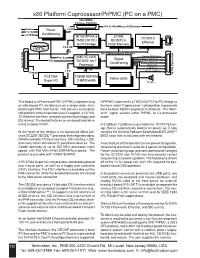
x86 Platform Coprocessor/PrPMC (PC on a PMC) 32b/33MHz PCI bus PN1/PN2 +5V to Kbd/Mouse/USB power Vcore Power +3.3V +2.5v Conditioning +3.3VIO 1K100 FPGA & 512KB 10/100TX TMS2250 PCI BIOS/PLA Ethernet RJ45 Compact to PCI bridge Flash Memory PLA I/O Flash site 8 32b/33MHz Internal PCI bus Analog SVGA Video Pwr Seq AMD SC2200 Signal COM 1 (RXD/TXD only) IDE "GEODE (tm)" Conditioning COM 2 (RXD/TXD only) Processor USB Port 1 Rear I/O PN4 I/O Rear 64 USB Port 2 LPC Keyboard/Mouse Floppy 36 Pin 36 Pin Connector PC87364 128MB SDRAM Status LEDs Super I/O (16MWx64b) PC Spkr This board is a Processor PMC (PrPMC) implementing A PrPMC implements a TMS2250 PCI-to-PCI bridge to an x86-based PC architecture on a single-wide, stan- the host, and a “Coprocessor” cofniguration implements dard height PMC form factor. This delivers a complete back-to-back 16550 compatible COM ports. The “Mon- x86 platform with comprehensive I/O support, a 10/100- arch” signal selects either PrPMC or Co-processor TX Ethernet interface, and disk access (both floppy and mode. IDE drives). The board features an on-board hard drive using Compact Flash. A 512Kbyte FLASH memory holds the 1K100 PLA im- age that is automatically loaded on power up. It also At the heart of the design is an Advanced Micro De- contains the General Software Embedded BIOS 2000™ vices SC2200 GEODE™ processor that integrates video, BIOS code that is included with each board. -

Convey Overview
THE WORLD’S FIRST HYBRID-CORE COMPUTER. CONVEY HYBRID-CORE COMPUTING Hybrid-core Computing Convey HC-1 High Performance of application- specific hardware Heterogenous solutions • can be much more efficient Performance/ • still hard to program Programmability and Power efficiency deployment ease of an x86 server Application Multicore solutions • don’t always scale well • parallel programming is hard Low Difficult Ease of Deployment Easy 1/22/2010 3 Hybrid-Core Computing Application-Specific Personalities Applications • Extend the x86 instruction set • Implement key operations in Convey Compilers hardware Life Sciences x86-64 ISA Custom ISA CAE Custom Financial Oil & Gas Shared Virtual Memory Cache-coherent, shared memory • Both ISAs address common memory *ISA: Instruction Set Architecture 7/12/2010 4 HC-1 Hardware PCI I/O FPGA FPGA Intel Personalities Chipset FPGA FPGA 8 GB/s 80 GB/s Memory Memory Cache Coherent, Shared Virtual Memory 1/22/2010 5 Using Personalities C/C++ Fortran • Personalities are user specifies reloadable personality at instruction sets Convey Software compile time Development Suite • Compiler instruction generates x86 descriptions and coprocessor instructions from Hybrid-Core Executable P ANSI standard x86-64 and Coprocessor Personalities C/C++ & Fortran Instructions • Executable can run on x86 nodes FPGA Convey HC-1 or Convey Hybrid- bitfiles Core nodes Intel x86 Coprocessor personality loaded at runtime by OS 1/22/2010 6 SYSTEM ARCHITECTURE HC-1 Architecture “Commodity” Intel Server Convey FPGA-based coprocessor Direct -

SYSCALL, IRET ● Opportunistic SYSRET Failed, Do IRET
entry_*.S A carefree stroll through kernel entry code Borislav Petkov SUSE Labs [email protected] Reasons for entry into the kernel ● System calls (64-bit, compat, 32-bit) ● Interrupts (NMIs, APIC, timer, IPIs... ) – software: INT 0x0-0xFF, INT3, … – external (hw-generated): CPU-ext logic, async to insn exec ● Architectural exceptions (sync vs async) – faults: precise, reported before faulting insn => restartable (#GP,#PF) – traps: precise, reported after trapping insn (#BP,#DB-both) – aborts: imprecise, not reliably restartable (#MC, unless MCG_STATUS.RIPV) 2 Intr/Ex entry ● IDT, int num index into it (256 vectors); all modes need an IDT ● If handler has a higher CPL, switch stacks ● A picture is always better: 3 45sec guide to Segmentation ● Continuous range at an arbitrary position in VA space ● Segments described by segment descriptors ● … selected by segment selectors ● … by indexing into segment descriptor tables (GDT,LDT,IDT,...) ● … and loaded by the hw into segment registers: – user: CS,DS,{E,F,G}S,SS – system: GDTR,LDTR,IDTR,TR (TSS) 4 A couple more seconds of Segmentation ● L (bit 21) new long mode attr: 1=long mode, 0=compat mode ● D (bit 22): default operand and address sizes ● legacy: D=1b – 32bit, D=0b – 16bit ● long mode: D=0b – 32-bit, L=1,D=1 reserved for future use ● G (bit 23): granularity: G=1b: seg limit scaled by 4K ● DPL: Descriptor Privilege Level of the segment 5 Legacy syscalls ● Call OS through gate descriptor (call, intr, trap or task gate) ● Overhead due to segment-based protection: – load new selector + desc into -

Introduction to Intel Xeon Phi Programming Models
Introduction to Intel Xeon Phi programming models F.Affinito F. Salvadore SCAI - CINECA Part I Introduction to the Intel Xeon Phi architecture Trends: transistors Trends: clock rates Trends: cores and threads Trends: summarizing... The number of transistors increases The power consumption must not increase The density cannot increase on a single chip Solution : Increase the number of cores GP-GPU and Intel Xeon Phi.. Coupled to the CPU To accelerate highly parallel kernels, facing with the Amdahl Law What is Intel Xeon Phi? 7100 / 5100 / 3100 Series available 5110P: Intel Xeon Phi clock: 1053 MHz 60 cores in-order ~ 1 TFlops/s DP peak performance (2 Tflops SP) 4 hardware threads per core 8 GB DDR5 memory 512-bit SIMD vectors (32 registers) Fully-coherent L1 and L2 caches PCIe bus (rev. 2.0) Max Memory bandwidth (theoretical) 320 GB/s Max TDP: 225 W MIC vs GPU naïve comparison The comparison is naïve System K20s 5110P # cores 2496 60 (*4) Memory size 5 GB 8 GB Peak performance 3.52 TFlops 2 TFlops (SP) Peak performance 1.17 TFlops 1 TFlops (DP) Clock rate 0.706 GHz 1.053 GHz Memory bandwidth 208 GB/s (ECC off) 320 GB/s Terminology MIC = Many Integrated Cores is the name of the architecture Xeon Phi = Commercial name of the Intel product based on the MIC architecture Knight's corner, Knight's landing, Knight's ferry are development names of MIC architectures We will often refer to the CPU as HOST and Xeon Phi as DEVICE Is it an accelerator? YES: It can be used to “accelerate” hot-spots of the code that are highly parallel and computationally extensive In this sense, it works alongside the CPU It can be used as an accelerator using the “offload” programming model An important bottleneck is represented by the communication between host and device (through PCIe) Under this respect, it is very similar to a GPU Is it an accelerator? / 2 NOT ONLY: the Intel Xeon Phi can behave as a many-core X86 node. -

Exploiting Free Silicon for Energy-Efficient Computing Directly
Exploiting Free Silicon for Energy-Efficient Computing Directly in NAND Flash-based Solid-State Storage Systems Peng Li Kevin Gomez David J. Lilja Seagate Technology Seagate Technology University of Minnesota, Twin Cities Shakopee, MN, 55379 Shakopee, MN, 55379 Minneapolis, MN, 55455 [email protected] [email protected] [email protected] Abstract—Energy consumption is a fundamental issue in today’s data A well-known solution to the memory wall issue is moving centers as data continue growing dramatically. How to process these computing closer to the data. For example, Gokhale et al [2] data in an energy-efficient way becomes more and more important. proposed a processor-in-memory (PIM) chip by adding a processor Prior work had proposed several methods to build an energy-efficient system. The basic idea is to attack the memory wall issue (i.e., the into the main memory for computing. Riedel et al [9] proposed performance gap between CPUs and main memory) by moving com- an active disk by using the processor inside the hard disk drive puting closer to the data. However, these methods have not been widely (HDD) for computing. With the evolution of other non-volatile adopted due to high cost and limited performance improvements. In memories (NVMs), such as phase-change memory (PCM) and spin- this paper, we propose the storage processing unit (SPU) which adds computing power into NAND flash memories at standard solid-state transfer torque (STT)-RAM, researchers also proposed to use these drive (SSD) cost. By pre-processing the data using the SPU, the data NVMs as the main memory for data-intensive applications [10] to that needs to be transferred to host CPUs for further processing improve the system energy-efficiency. -
Intermediate X86 Part 2
Intermediate x86 Part 2 Xeno Kovah – 2010 xkovah at gmail All materials are licensed under a Creative Commons “Share Alike” license. • http://creativecommons.org/licenses/by-sa/3.0/ 2 Paging • Previously we discussed how segmentation translates a logical address (segment selector + offset) into a 32 bit linear address. • When paging is disabled, linear addresses map 1:1 to physical addresses. • When paging is enabled, a linear address must be translated to determine the physical address it corresponds to. • It’s called “paging” because physical memory is divided into fixed size chunks called pages. • The analogy is to books in a library. When you need to find some information first you go to the library where you look up the relevant book, then you select the book and look up a specific page, from there you maybe look for a specific specific sentence …or “word”? ;) • The internets ruined the analogy! 3 Notes and Terminology • All of the figures or references to the manual in this section refer to the Nov 2008 manual (available in the class materials). This is because I think the manuals <= 2008 organized and presented much clearer than >= 2009 manuals. • When I refer to a “frame” it means “a page- sized chunk of physical memory” • When paging is enabled, a “linear address” is the same thing as a “virtual memory ” “ ” address or virtual address 4 The terrifying truth revealed! And now you knowAHHHHHHHH!!!…the rest of the story.(Nah, Good it’s not so bad day. :)) 5 Virtual Memory • When paging is enabled, the 32 bit linear address space can be mapped to a physical address space less than 32 bits. -

CUDA What Is GPGPU
What is GPGPU ? • General Purpose computation using GPU in applications other than 3D graphics CUDA – GPU accelerates critical path of application • Data parallel algorithms leverage GPU attributes – Large data arrays, streaming throughput Slides by David Kirk – Fine-grain SIMD parallelism – Low-latency floating point (FP) computation • Applications – see //GPGPU.org – Game effects (FX) physics, image processing – Physical modeling, computational engineering, matrix algebra, convolution, correlation, sorting Previous GPGPU Constraints CUDA • Dealing with graphics API per thread per Shader Input Registers • “Compute Unified Device Architecture” – Working with the corner cases per Context • General purpose programming model of the graphics API Fragment Program Texture – User kicks off batches of threads on the GPU • Addressing modes Constants – GPU = dedicated super-threaded, massively data parallel co-processor – Limited texture size/dimension Temp Registers • Targeted software stack – Compute oriented drivers, language, and tools Output Registers • Shader capabilities • Driver for loading computation programs into GPU FB Memory – Limited outputs – Standalone Driver - Optimized for computation • Instruction sets – Interface designed for compute - graphics free API – Data sharing with OpenGL buffer objects – Lack of Integer & bit ops – Guaranteed maximum download & readback speeds • Communication limited – Explicit GPU memory management – Between pixels – Scatter a[i] = p 1 Parallel Computing on a GPU Extended C • Declspecs • NVIDIA GPU Computing Architecture – global, device, shared, __device__ float filter[N]; – Via a separate HW interface local, constant __global__ void convolve (float *image) { – In laptops, desktops, workstations, servers GeForce 8800 __shared__ float region[M]; ... • Keywords • 8-series GPUs deliver 50 to 200 GFLOPS region[threadIdx] = image[i]; on compiled parallel C applications – threadIdx, blockIdx • Intrinsics __syncthreads() – __syncthreads .. -

Accelerators for HP Proliant Servers Enable Scalable and Efficient High-Performance Computing
Family data sheet Accelerators for HP ProLiant servers Enable scalable and efficient high-performance computing November 2014 Family data sheet | Accelerators for HP ProLiant servers HP high-performance computing has made it possible to accelerate innovation at any scale. But traditional CPU technology is no longer capable of sufficiently scaling performance to address the skyrocketing demand for compute resources. HP high-performance computing solutions are built on HP ProLiant servers using industry-leading accelerators to dramatically increase performance with lower power requirements. Innovation is the foundation for success What is hybrid computing? Accelerators are revolutionizing high performance computing A hybrid computing model is one where High-performance computing (HPC) is being used to address many of modern society’s biggest accelerators (known as GPUs or coprocessors) challenges, such as designing new vaccines and genetically engineering drugs to fight diseases, work together with CPUs to perform computing finding and extracting precious oil and gas resources, improving financial instruments, and tasks. designing more fuel efficient engines. As parallel processors, accelerators can split computations into hundreds or thousands of This rapid pace of innovation has created an insatiable demand for compute power. At the same pieces and calculate them simultaneously. time, multiple strict requirements are placed on system performance, power consumption, size, response, reliability, portability, and design time. Modern HPC systems are rapidly evolving, Offloading the most compute-intensive portions of already reaching petaflop and targeting exaflop performance. applications to accelerators dramatically increases both application performance and computational All of these challenges lead to a common set of requirements: a need for more computing efficiency. -

Quick-Reference Guide to Optimization with Intel® Compilers
Quick Reference Guide to Optimization with Intel® C++ and Fortran Compilers v19.1 For IA-32 processors, Intel® 64 processors, Intel® Xeon Phi™ processors and compatible non-Intel processors. Contents Application Performance .............................................................................................................................. 2 General Optimization Options and Reports ** ............................................................................................. 3 Parallel Performance ** ................................................................................................................................ 4 Recommended Processor-Specific Optimization Options ** ....................................................................... 5 Optimizing for the Intel® Xeon Phi™ x200 product family ............................................................................ 6 Interprocedural Optimization (IPO) and Profile-Guided Optimization (PGO) Options ................................ 7 Fine-Tuning (All Processors) ** ..................................................................................................................... 8 Floating-Point Arithmetic Options .............................................................................................................. 10 Processor Code Name With Instruction Set Extension Name Synonym .................................................... 11 Frequently Used Processor Names in Compiler Options ........................................................................... -
Broadwell Skylake Next Gen* NEW Intel NEW Intel NEW Intel Microarchitecture Microarchitecture Microarchitecture
15 лет доступности IOTG is extending the product availability for IOTG roadmap products from a minimum of 7 years to a minimum of 15 years when both processor and chipset are on 22nm and newer process technologies. - Xeon Scalable (w/ chipsets) - E3-12xx/15xx v5 and later (w/ chipsets) - 6th gen Core and later (w/ chipsets) - Bay Trail (E3800) and later products (Braswell, N3xxx) - Atom C2xxx (Rangeley) and later - Не включает в себя Xeon-D (7 лет) и E5-26xx v4 (7 лет) 2 IOTG Product Availability Life-Cycle 15 year product availability will start with the following products: Product Discontinuance • Intel® Xeon® Processor Scalable Family codenamed Skylake-SP and later with associated chipsets Notification (PDN)† • Intel® Xeon® E3-12xx/15xx v5 series (Skylake) and later with associated chipsets • 6th Gen Intel® Core™ processor family (Skylake) and later (includes Intel® Pentium® and Celeron® processors) with PDNs will typically be issued no later associated chipsets than 13.5 years after component • Intel Pentium processor N3700 (Braswell) and later and Intel Celeron processors N3xxx (Braswell) and J1900/N2xxx family introduction date. PDNs are (Bay Trail) and later published at https://qdms.intel.com/ • Intel® Atom® processor C2xxx (Rangeley) and E3800 family (Bay Trail) and late Last 7 year product availability Time Last Last Order Ship Last 15 year product availability Time Last Last Order Ship L-1 L L+1 L+2 L+3 L+4 L+5 L+6 L+7 L+8 L+9 L+10 L+11 L+12 L+13 L+14 L+15 Years Introduction of component family † Intel may support this extended manufacturing using reasonably Last Time Order/Ship Periods Component family introduction dates are feasible means deemed by Intel to be appropriate. -

Multiprocessing Contents
Multiprocessing Contents 1 Multiprocessing 1 1.1 Pre-history .............................................. 1 1.2 Key topics ............................................... 1 1.2.1 Processor symmetry ...................................... 1 1.2.2 Instruction and data streams ................................. 1 1.2.3 Processor coupling ...................................... 2 1.2.4 Multiprocessor Communication Architecture ......................... 2 1.3 Flynn’s taxonomy ........................................... 2 1.3.1 SISD multiprocessing ..................................... 2 1.3.2 SIMD multiprocessing .................................... 2 1.3.3 MISD multiprocessing .................................... 3 1.3.4 MIMD multiprocessing .................................... 3 1.4 See also ................................................ 3 1.5 References ............................................... 3 2 Computer multitasking 5 2.1 Multiprogramming .......................................... 5 2.2 Cooperative multitasking ....................................... 6 2.3 Preemptive multitasking ....................................... 6 2.4 Real time ............................................... 7 2.5 Multithreading ............................................ 7 2.6 Memory protection .......................................... 7 2.7 Memory swapping .......................................... 7 2.8 Programming ............................................. 7 2.9 See also ................................................ 8 2.10 References .............................................