Teaching Continuum Mechanics in a Mechanical Engineering Program Yucheng Liu University of Louisiana at Lafayette
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Vector Mechanics: Statics
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online | PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.PDHonline.org www.PDHcenter.com An Approved Continuing Education Provider www.PDHcenter.com PDHonline Course G492 www.PDHonline.org Table of Contents Introduction ..................................................................................................................................... 1 Vectors ............................................................................................................................................ 1 Vector Decomposition ................................................................................................................ 2 Components of a Vector ............................................................................................................. 2 Force ............................................................................................................................................... 4 Equilibrium ..................................................................................................................................... 5 Equilibrium of a Particle ............................................................................................................. 6 Rigid Bodies.............................................................................................................................. 10 Pulleys ...................................................................................................................................... -

Fluid Mechanics
FLUID MECHANICS PROF. DR. METİN GÜNER COMPILER ANKARA UNIVERSITY FACULTY OF AGRICULTURE DEPARTMENT OF AGRICULTURAL MACHINERY AND TECHNOLOGIES ENGINEERING 1 1. INTRODUCTION Mechanics is the oldest physical science that deals with both stationary and moving bodies under the influence of forces. Mechanics is divided into three groups: a) Mechanics of rigid bodies, b) Mechanics of deformable bodies, c) Fluid mechanics Fluid mechanics deals with the behavior of fluids at rest (fluid statics) or in motion (fluid dynamics), and the interaction of fluids with solids or other fluids at the boundaries (Fig.1.1.). Fluid mechanics is the branch of physics which involves the study of fluids (liquids, gases, and plasmas) and the forces on them. Fluid mechanics can be divided into two. a)Fluid Statics b)Fluid Dynamics Fluid statics or hydrostatics is the branch of fluid mechanics that studies fluids at rest. It embraces the study of the conditions under which fluids are at rest in stable equilibrium Hydrostatics is fundamental to hydraulics, the engineering of equipment for storing, transporting and using fluids. Hydrostatics offers physical explanations for many phenomena of everyday life, such as why atmospheric pressure changes with altitude, why wood and oil float on water, and why the surface of water is always flat and horizontal whatever the shape of its container. Fluid dynamics is a subdiscipline of fluid mechanics that deals with fluid flow— the natural science of fluids (liquids and gases) in motion. It has several subdisciplines itself, including aerodynamics (the study of air and other gases in motion) and hydrodynamics (the study of liquids in motion). -

Knowledge Assessment in Statics: Concepts Versus Skills
Session 1168 Knowledge Assessment in Statics: Concepts versus skills Scott Danielson Arizona State University Abstract Following the lead of the physics community, engineering faculty have recognized the value of good assessment instruments for evaluating the learning of their students. These assessment instruments can be used to both measure student learning and to evaluate changes in teaching, i.e., did student-learning increase due different ways of teaching. As a result, there are significant efforts underway to develop engineering subject assessment tools. For instance, the Foundation Coalition is supporting assessment tool development efforts in a number of engineering subjects. These efforts have focused on developing “concept” inventories. These concept inventories focus on determining student understanding of the subject’s fundamental concepts. Separately, a NSF-supported effort to develop an assessment tool for statics was begun in the last year by the authors. As a first step, the project team analyzed prior work aimed at delineating important knowledge areas in statics. They quickly recognized that these important knowledge areas contained both conceptual and “skill” components. Both knowledge areas are described and examples of each are provided. Also, a cognitive psychology-based taxonomy of declarative and procedural knowledge is discussed in relation to determining the difference between a concept and a skill. Subsequently, the team decided to focus on development of a concept-based statics assessment tool. The ongoing Delphi process to refine the inventory of important statics concepts and validate the concepts with a broader group of subject matter experts is described. However, the value and need for a skills-based assessment tool is also recognized. -

Fluid Mechanics
cen72367_fm.qxd 11/23/04 11:22 AM Page i FLUID MECHANICS FUNDAMENTALS AND APPLICATIONS cen72367_fm.qxd 11/23/04 11:22 AM Page ii McGRAW-HILL SERIES IN MECHANICAL ENGINEERING Alciatore and Histand: Introduction to Mechatronics and Measurement Systems Anderson: Computational Fluid Dynamics: The Basics with Applications Anderson: Fundamentals of Aerodynamics Anderson: Introduction to Flight Anderson: Modern Compressible Flow Barber: Intermediate Mechanics of Materials Beer/Johnston: Vector Mechanics for Engineers Beer/Johnston/DeWolf: Mechanics of Materials Borman and Ragland: Combustion Engineering Budynas: Advanced Strength and Applied Stress Analysis Çengel and Boles: Thermodynamics: An Engineering Approach Çengel and Cimbala: Fluid Mechanics: Fundamentals and Applications Çengel and Turner: Fundamentals of Thermal-Fluid Sciences Çengel: Heat Transfer: A Practical Approach Crespo da Silva: Intermediate Dynamics Dieter: Engineering Design: A Materials & Processing Approach Dieter: Mechanical Metallurgy Doebelin: Measurement Systems: Application & Design Dunn: Measurement & Data Analysis for Engineering & Science EDS, Inc.: I-DEAS Student Guide Hamrock/Jacobson/Schmid: Fundamentals of Machine Elements Henkel and Pense: Structure and Properties of Engineering Material Heywood: Internal Combustion Engine Fundamentals Holman: Experimental Methods for Engineers Holman: Heat Transfer Hsu: MEMS & Microsystems: Manufacture & Design Hutton: Fundamentals of Finite Element Analysis Kays/Crawford/Weigand: Convective Heat and Mass Transfer Kelly: Fundamentals -

Classical Mechanics
Classical Mechanics Hyoungsoon Choi Spring, 2014 Contents 1 Introduction4 1.1 Kinematics and Kinetics . .5 1.2 Kinematics: Watching Wallace and Gromit ............6 1.3 Inertia and Inertial Frame . .8 2 Newton's Laws of Motion 10 2.1 The First Law: The Law of Inertia . 10 2.2 The Second Law: The Equation of Motion . 11 2.3 The Third Law: The Law of Action and Reaction . 12 3 Laws of Conservation 14 3.1 Conservation of Momentum . 14 3.2 Conservation of Angular Momentum . 15 3.3 Conservation of Energy . 17 3.3.1 Kinetic energy . 17 3.3.2 Potential energy . 18 3.3.3 Mechanical energy conservation . 19 4 Solving Equation of Motions 20 4.1 Force-Free Motion . 21 4.2 Constant Force Motion . 22 4.2.1 Constant force motion in one dimension . 22 4.2.2 Constant force motion in two dimensions . 23 4.3 Varying Force Motion . 25 4.3.1 Drag force . 25 4.3.2 Harmonic oscillator . 29 5 Lagrangian Mechanics 30 5.1 Configuration Space . 30 5.2 Lagrangian Equations of Motion . 32 5.3 Generalized Coordinates . 34 5.4 Lagrangian Mechanics . 36 5.5 D'Alembert's Principle . 37 5.6 Conjugate Variables . 39 1 CONTENTS 2 6 Hamiltonian Mechanics 40 6.1 Legendre Transformation: From Lagrangian to Hamiltonian . 40 6.2 Hamilton's Equations . 41 6.3 Configuration Space and Phase Space . 43 6.4 Hamiltonian and Energy . 45 7 Central Force Motion 47 7.1 Conservation Laws in Central Force Field . 47 7.2 The Path Equation . -

AST242 LECTURE NOTES PART 3 Contents 1. Viscous Flows 2 1.1. the Velocity Gradient Tensor 2 1.2. Viscous Stress Tensor 3 1.3. Na
AST242 LECTURE NOTES PART 3 Contents 1. Viscous flows 2 1.1. The velocity gradient tensor 2 1.2. Viscous stress tensor 3 1.3. Navier Stokes equation { diffusion 5 1.4. Viscosity to order of magnitude 6 1.5. Example using the viscous stress tensor: The force on a moving plate 6 1.6. Example using the Navier Stokes equation { Poiseuille flow or Flow in a capillary 7 1.7. Viscous Energy Dissipation 8 2. The Accretion disk 10 2.1. Accretion to order of magnitude 14 2.2. Hydrostatic equilibrium for an accretion disk 15 2.3. Shakura and Sunyaev's α-disk 17 2.4. Reynolds Number 17 2.5. Circumstellar disk heated by stellar radiation 18 2.6. Viscous Energy Dissipation 20 2.7. Accretion Luminosity 21 3. Vorticity and Rotation 24 3.1. Helmholtz Equation 25 3.2. Rate of Change of a vector element that is moving with the fluid 26 3.3. Kelvin Circulation Theorem 28 3.4. Vortex lines and vortex tubes 30 3.5. Vortex stretching and angular momentum 32 3.6. Bernoulli's constant in a wake 33 3.7. Diffusion of vorticity 34 3.8. Potential Flow and d'Alembert's paradox 34 3.9. Burger's vortex 36 4. Rotating Flows 38 4.1. Coriolis Force 38 4.2. Rossby and Ekman numbers 39 4.3. Geostrophic flows and the Taylor Proudman theorem 39 4.4. Two dimensional flows on the surface of a planet 41 1 2 AST242 LECTURE NOTES PART 3 4.5. Thermal winds? 42 5. -

Foundations of Continuum Mechanics
Foundations of Continuum Mechanics • Concerned with material bodies (solids and fluids) which can change shape when loaded, and view is taken that bodies are continuous bodies. • Commonly known that matter is made up of discrete particles, and only known continuum is empty space. • Experience has shown that descriptions based on continuum modeling is useful, provided only that variation of field quantities on the scale of deformation mechanism is small in some sense. Goal of continuum mechanics is to solve BVP. The main steps are 1. Mathematical preliminaries (Tensor theory) 2. Kinematics 3. Balance laws and field equations 4. Constitutive laws (models) Mathematical structure adopted to ensure that results are coordinate invariant and observer invariant and are consistent with material symmetries. Vector and Tensor Theory Most tensors of interest in continuum mechanics are one of the following type: 1. Symmetric – have 3 real eigenvalues and orthogonal eigenvectors (eg. Stress) 2. Skew-Symmetric – is like a vector, has an associated axial vector (eg. Spin) 3. Orthogonal – describes a transformation of basis (eg. Rotation matrix) → 3 3 3 u = ∑uiei = uiei T = ∑∑Tijei ⊗ e j = Tijei ⊗ e j i=1 ~ ij==1 1 When the basis ei is changed, the components of tensors and vectors transform in a specific way. Certain quantities remain invariant – eg. trace, determinant. Gradient of an nth order tensor is a tensor of order n+1 and divergence of an nth order tensor is a tensor of order n-1. ∂ui ∂ui ∂Tij ∇ ⋅u = ∇ ⊗ u = ei ⊗ e j ∇ ⋅ T = e j ∂xi ∂x j ∂xi Integral (divergence) Theorems: T ∫∫RR∇ ⋅u dv = ∂ u⋅n da ∫∫RR∇ ⊗ u dv = ∂ u ⊗ n da ∫∫RR∇ ⋅ T dv = ∂ T n da Kinematics The tensor that plays the most important role in kinematics is the Deformation Gradient x(X) = X + u(X) F = ∇X ⊗ x(X) = I + ∇X ⊗ u(X) F can be used to determine 1. -

Lecture 1: Introduction
Lecture 1: Introduction E. J. Hinch Non-Newtonian fluids occur commonly in our world. These fluids, such as toothpaste, saliva, oils, mud and lava, exhibit a number of behaviors that are different from Newtonian fluids and have a number of additional material properties. In general, these differences arise because the fluid has a microstructure that influences the flow. In section 2, we will present a collection of some of the interesting phenomena arising from flow nonlinearities, the inhibition of stretching, elastic effects and normal stresses. In section 3 we will discuss a variety of devices for measuring material properties, a process known as rheometry. 1 Fluid Mechanical Preliminaries The equations of motion for an incompressible fluid of unit density are (for details and derivation see any text on fluid mechanics, e.g. [1]) @u + (u · r) u = r · S + F (1) @t r · u = 0 (2) where u is the velocity, S is the total stress tensor and F are the body forces. It is customary to divide the total stress into an isotropic part and a deviatoric part as in S = −pI + σ (3) where tr σ = 0. These equations are closed only if we can relate the deviatoric stress to the velocity field (the pressure field satisfies the incompressibility condition). It is common to look for local models where the stress depends only on the local gradients of the flow: σ = σ (E) where E is the rate of strain tensor 1 E = ru + ruT ; (4) 2 the symmetric part of the the velocity gradient tensor. The trace-free requirement on σ and the physical requirement of symmetry σ = σT means that there are only 5 independent components of the deviatoric stress: 3 shear stresses (the off-diagonal elements) and 2 normal stress differences (the diagonal elements constrained to sum to 0). -

Pacific Northwest National Laboratory Operated by Battelie for the U.S
PNNL-11668 UC-2030 Pacific Northwest National Laboratory Operated by Battelie for the U.S. Department of Energy Seismic Event-Induced Waste Response and Gas Mobilization Predictions for Typical Hanf ord Waste Tank Configurations H. C. Reid J. E. Deibler 0C1 1 0 W97 OSTI September 1997 •-a Prepared for the US. Department of Energy under Contract DE-AC06-76RLO1830 1» DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government, Neither the United States Government nor any agency thereof, nor Battelle Memorial Institute, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or Battelle Memorial Institute. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. PACIFIC NORTHWEST NATIONAL LABORATORY operated by BATTELLE for the UNITED STATES DEPARTMENT OF ENERGY under Contract DE-AC06-76RLO 1830 Printed in the United States of America Available to DOE and DOE contractors from the Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831; prices available from (615) 576-8401, Available to the public from the National Technical Information Service, U.S. -
Hydrostatic Forces on Surface
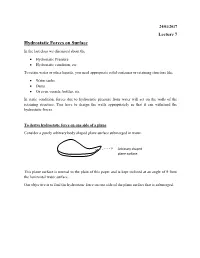
24/01/2017 Lecture 7 Hydrostatic Forces on Surface In the last class we discussed about the Hydrostatic Pressure Hydrostatic condition, etc. To retain water or other liquids, you need appropriate solid container or retaining structure like Water tanks Dams Or even vessels, bottles, etc. In static condition, forces due to hydrostatic pressure from water will act on the walls of the retaining structure. You have to design the walls appropriately so that it can withstand the hydrostatic forces. To derive hydrostatic force on one side of a plane Consider a purely arbitrary body shaped plane surface submerged in water. Arbitrary shaped plane surface This plane surface is normal to the plain of this paper and is kept inclined at an angle of θ from the horizontal water surface. Our objective is to find the hydrostatic force on one side of the plane surface that is submerged. (Source: Fluid Mechanics by F.M. White) Let ‘h’ be the depth from the free surface to any arbitrary element area ‘dA’ on the plane. Pressure at h(x,y) will be p = pa + ρgh where, pa = atmospheric pressure. For our convenience to make various points on the plane, we have taken the x-y coordinates accordingly. We also introduce a dummy variable ξ that show the inclined distance of the arbitrary element area dA from the free surface. The total hydrostatic force on one side of the plane is F pdA where, ‘A’ is the total area of the plane surface. A This hydrostatic force is similar to application of continuously varying load on the plane surface (recall solid mechanics). -

Ch. 8 Deflections Due to Bending
446.201A (Solid Mechanics) Professor Youn, Byeng Dong CH. 8 DEFLECTIONS DUE TO BENDING Ch. 8 Deflections due to bending 1 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong 8.1 Introduction i) We consider the deflections of slender members which transmit bending moments. ii) We shall treat statically indeterminate beams which require simultaneous consideration of all three of the steps (2.1) iii) We study mechanisms of plastic collapse for statically indeterminate beams. iv) The calculation of the deflections is very important way to analyze statically indeterminate beams and confirm whether the deflections exceed the maximum allowance or not. 8.2 The Moment – Curvature Relation ▶ From Ch.7 à When a symmetrical, linearly elastic beam element is subjected to pure bending, as shown in Fig. 8.1, the curvature of the neutral axis is related to the applied bending moment by the equation. ∆ = = = = (8.1) ∆→ ∆ For simplification, → ▶ Simplification i) When is not a constant, the effect on the overall deflection by the shear force can be ignored. ii) Assume that although M is not a constant the expressions defined from pure bending can be applied. Ch. 8 Deflections due to bending 2 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong ▶ Differential equations between the curvature and the deflection 1▷ The case of the large deflection The slope of the neutral axis in Fig. 8.2 (a) is = Next, differentiation with respect to arc length s gives = ( ) ∴ = → = (a) From Fig. 8.2 (b) () = () + () → = 1 + Ch. 8 Deflections due to bending 3 / 27 446.201A (Solid Mechanics) Professor Youn, Byeng Dong → = (b) (/) & = = (c) [(/)]/ If substitutng (b) and (c) into the (a), / = = = (8.2) [(/)]/ [()]/ ∴ = = [()]/ When the slope angle shown in Fig. -

Newtonian Mechanics Is Most Straightforward in Its Formulation and Is Based on Newton’S Second Law
CLASSICAL MECHANICS D. A. Garanin September 30, 2015 1 Introduction Mechanics is part of physics studying motion of material bodies or conditions of their equilibrium. The latter is the subject of statics that is important in engineering. General properties of motion of bodies regardless of the source of motion (in particular, the role of constraints) belong to kinematics. Finally, motion caused by forces or interactions is the subject of dynamics, the biggest and most important part of mechanics. Concerning systems studied, mechanics can be divided into mechanics of material points, mechanics of rigid bodies, mechanics of elastic bodies, and mechanics of fluids: hydro- and aerodynamics. At the core of each of these areas of mechanics is the equation of motion, Newton's second law. Mechanics of material points is described by ordinary differential equations (ODE). One can distinguish between mechanics of one or few bodies and mechanics of many-body systems. Mechanics of rigid bodies is also described by ordinary differential equations, including positions and velocities of their centers and the angles defining their orientation. Mechanics of elastic bodies and fluids (that is, mechanics of continuum) is more compli- cated and described by partial differential equation. In many cases mechanics of continuum is coupled to thermodynamics, especially in aerodynamics. The subject of this course are systems described by ODE, including particles and rigid bodies. There are two limitations on classical mechanics. First, speeds of the objects should be much smaller than the speed of light, v c, otherwise it becomes relativistic mechanics. Second, the bodies should have a sufficiently large mass and/or kinetic energy.