Andrew S. Tanenbaum, Structured Computer Organization (6Th Edition)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Review Memory Disambiguation Review Explicit Register Renaming
5HYLHZ5HRUGHU%XIIHU 52% &6 *UDGXDWH&RPSXWHU$UFKLWHFWXUH 8VHRIUHRUGHUEXIIHU /HFWXUH ² ,QRUGHULVVXH2XWRIRUGHUH[HFXWLRQ,QRUGHUFRPPLW ² +ROGVUHVXOWVXQWLOWKH\FDQEHFRPPLWWHGLQRUGHU ,QVWUXFWLRQ/HYHO3DUDOOHOLVP ª 6HUYHVDVVRXUFHRIYDOXHVXQWLOLQVWUXFWLRQVFRPPLWWHG ² 3URYLGHVVXSSRUWIRUSUHFLVHH[FHSWLRQV6SHFXODWLRQVLPSO\WKURZRXW *HWWLQJWKH&3, LQVWUXFWLRQVODWHUWKDQH[FHSWHGLQVWUXFWLRQ ² &RPPLWVXVHUYLVLEOHVWDWHLQLQVWUXFWLRQRUGHU ² 6WRUHVVHQWWRPHPRU\V\VWHPRQO\ZKHQWKH\UHDFKKHDGRIEXIIHU 6HSWHPEHU ,Q2UGHU&RPPLW LVLPSRUWDQWEHFDXVH 3URI-RKQ.XELDWRZLF] ² $OORZVWKHJHQHUDWLRQRISUHFLVHH[FHSWLRQV ² $OORZVVSHFXODWLRQDFURVVEUDQFKHV &6.XELDWRZLF] &6.XELDWRZLF] /HF /HF 5HYLHZ0HPRU\'LVDPELJXDWLRQ 5HYLHZ([SOLFLW5HJLVWHU5HQDPLQJ 4XHVWLRQ*LYHQDORDGWKDWIROORZVDVWRUHLQSURJUDP 0DNHXVHRIDSK\VLFDO UHJLVWHUILOHWKDWLVODUJHUWKDQ RUGHUDUHWKHWZRUHODWHG" QXPEHURIUHJLVWHUVVSHFLILHGE\,6$ ² 7U\LQJWRGHWHFW5$:KD]DUGVWKURXJKPHPRU\ .H\LQVLJKW$OORFDWHDQHZSK\VLFDOGHVWLQDWLRQUHJLVWHU ² 6WRUHVFRPPLWLQRUGHU 52% VRQR:$5:$:PHPRU\KD]DUGV IRUHYHU\LQVWUXFWLRQWKDWZULWHV ,PSOHPHQWDWLRQ ² 5HPRYHVDOOFKDQFHRI:$5RU:$:KD]DUGV ² .HHSTXHXHRIVWRUHVLQSURJRUGHU ² 6LPLODUWRFRPSLOHUWUDQVIRUPDWLRQFDOOHG6WDWLF6LQJOH$VVLJQPHQW ² :DWFKIRUSRVLWLRQRIQHZORDGVUHODWLYHWRH[LVWLQJVWRUHV ª /LNHKDUGZDUHEDVHGG\QDPLFFRPSLODWLRQ" :KHQKDYHDGGUHVVIRUORDGFKHFNVWRUHTXHXH 0HFKDQLVP".HHSDWUDQVODWLRQWDEOH ² ,IDQ\ VWRUHSULRUWRORDGLVZDLWLQJIRULWVDGGUHVVVWDOOORDG ² ,6$UHJLVWHU⇒ SK\VLFDOUHJLVWHUPDSSLQJ ² ,IORDGDGGUHVVPDWFKHVHDUOLHUVWRUHDGGUHVV DVVRFLDWLYHORRNXS ² :KHQUHJLVWHUZULWWHQUHSODFHHQWU\ZLWKQHZUHJLVWHUIURPIUHHOLVW WKHQZHKDYHDPHPRU\LQGXFHG -

Configurable RISC-V Softcore Processor for FPGA Implementation
1 Configurable RISC-V softcore processor for FPGA implementation Joao˜ Filipe Monteiro Rodrigues, Instituto Superior Tecnico,´ Universidade de Lisboa Abstract—Over the past years, the processor market has and development of several programming tools. The RISC-V been dominated by proprietary architectures that implement Foundation controls the RISC-V evolution, and its members instruction sets that require licensing and the payment of fees to are responsible for promoting the adoption of RISC-V and receive permission so they can be used. ARM is an example of one of those companies that sell its microarchitectures to participating in the development of the new ISA. In the list of the manufactures so they can implement them into their own members are big companies like Google, NVIDIA, Western products, and it does not allow the use of its instruction set Digital, Samsung, or Qualcomm. (ISA) in other implementations without licensing. The RISC-V The main goal of this work is the development of a RISC- instruction set appeared proposing the hardware and software V softcore processor to be implemented in an FPGA, using development without costs, through the creation of an open- source ISA. This way, it is possible that any project that im- a non-RISC-V core as the base of this architecture. The plements the RISC-V ISA can be made available open-source or proposed solution is focused on solving the problems and even implemented in commercial products. However, the RISC- limitations identified in the other RISC-V cores that were V solutions that have been developed do not present the needed analyzed in this thesis, especially in terms of the adaptability requirements so they can be included in projects, especially the and flexibility, allowing future modifications according to the research projects, because they offer poor documentation, and their performances are not suitable. -
8088 8-Bit Hmos Microprocessor 8088 8088-2
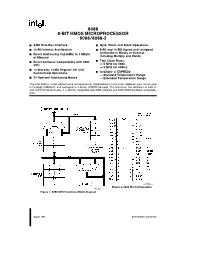
8088 8-BIT HMOS MICROPROCESSOR 8088/8088-2 Y 8-Bit Data Bus Interface Y Byte, Word, and Block Operations Y 16-Bit Internal Architecture Y 8-Bit and 16-Bit Signed and Unsigned Arithmetic in Binary or Decimal, Y Direct Addressing Capability to 1 Mbyte of Memory Including Multiply and Divide Y Two Clock Rates: Y Direct Software Compatibility with 8086 CPU Ð 5 MHz for 8088 Ð 8 MHz for 8088-2 Y 14-Word by 16-Bit Register Set with Symmetrical Operations Y Available in EXPRESS Ð Standard Temperature Range Y 24 Operand Addressing Modes Ð Extended Temperature Range The Intel 8088 is a high performance microprocessor implemented in N-channel, depletion load, silicon gate technology (HMOS-II), and packaged in a 40-pin CERDIP package. The processor has attributes of both 8- and 16-bit microprocessors. It is directly compatible with 8086 software and 8080/8085 hardware and periph- erals. 231456±2 Figure 2. 8088 Pin Configuration 231456±1 Figure 1. 8088 CPU Functional Block Diagram August 1990 Order Number: 231456-006 8088 Table 1. Pin Description The following pin function descriptions are for 8088 systems in either minimum or maximum mode. The ``local bus'' in these descriptions is the direct multiplexed bus interface connection to the 8088 (without regard to additional bus buffers). Symbol Pin No. Type Name and Function AD7±AD0 9±16 I/O ADDRESS DATA BUS: These lines constitute the time multiplexed memory/IO address (T1) and data (T2, T3, Tw, T4) bus. These lines are active HIGH and float to 3-state OFF during interrupt acknowledge and local bus ``hold acknowledge''. -

Phone-Tapping Revelations Shock Mijas Mayor and Council
FREE COPY BREXIT THE NEWSPAPER FOR SOUTHERN SPAIN Costa Brits join Spaniards for Official market leader Audited by PGD/OJD London march March 29th to April 4th 2019 www.surinenglish.com As the UK’s exit from the EU remains unclear, News 2 Health & Beauty 42 Comment 20 Sport 48 residents support calls Lifestyle 22 My Home 53 What To Do 34 Classified 56 for a people’s vote P18 in English Food & Drink 39 Time Out 62 The historic Willow steamboat partially sank Coín has dumped in Benalmádena marina this week due to the enough sewage to rough sea. :: SUR fill a reservoir, says investigation The inquiry into the disposal of polluted water in Nerja and Coín throws up eye-watering figures P6 A third of colon cancer deaths could have been prevented. Residents are urged to take up health service’s screening offer P46 Under the spell of San Miguel de Allende. Andrew Forbes travels to Mexico for this month’s Travel Special P22-25 SPORT Malaga return to league THE COAST FALLS VICTIM TO THE WAVES action tonight after a 1-0 victory over Nàstic brought smiles back to the fans’ Beaches have been battered just two weeks before tourists flock in for Easter P2&3 faces at the weekend P48&49 Phone-tapping revelations shock Mijas mayor and council :: AGENCIA LOF Events in the minority Ciudadanos count, after the director of the coun- It’s not yet known who is council of Mijas took a surprising cil-owned broadcaster was removed, turn this week when it emerged that recently raised the alarm. -

Computer Organization and Architecture Designing for Performance Ninth Edition
COMPUTER ORGANIZATION AND ARCHITECTURE DESIGNING FOR PERFORMANCE NINTH EDITION William Stallings Boston Columbus Indianapolis New York San Francisco Upper Saddle River Amsterdam Cape Town Dubai London Madrid Milan Munich Paris Montréal Toronto Delhi Mexico City São Paulo Sydney Hong Kong Seoul Singapore Taipei Tokyo Editorial Director: Marcia Horton Designer: Bruce Kenselaar Executive Editor: Tracy Dunkelberger Manager, Visual Research: Karen Sanatar Associate Editor: Carole Snyder Manager, Rights and Permissions: Mike Joyce Director of Marketing: Patrice Jones Text Permission Coordinator: Jen Roach Marketing Manager: Yez Alayan Cover Art: Charles Bowman/Robert Harding Marketing Coordinator: Kathryn Ferranti Lead Media Project Manager: Daniel Sandin Marketing Assistant: Emma Snider Full-Service Project Management: Shiny Rajesh/ Director of Production: Vince O’Brien Integra Software Services Pvt. Ltd. Managing Editor: Jeff Holcomb Composition: Integra Software Services Pvt. Ltd. Production Project Manager: Kayla Smith-Tarbox Printer/Binder: Edward Brothers Production Editor: Pat Brown Cover Printer: Lehigh-Phoenix Color/Hagerstown Manufacturing Buyer: Pat Brown Text Font: Times Ten-Roman Creative Director: Jayne Conte Credits: Figure 2.14: reprinted with permission from The Computer Language Company, Inc. Figure 17.10: Buyya, Rajkumar, High-Performance Cluster Computing: Architectures and Systems, Vol I, 1st edition, ©1999. Reprinted and Electronically reproduced by permission of Pearson Education, Inc. Upper Saddle River, New Jersey, Figure 17.11: Reprinted with permission from Ethernet Alliance. Credits and acknowledgments borrowed from other sources and reproduced, with permission, in this textbook appear on the appropriate page within text. Copyright © 2013, 2010, 2006 by Pearson Education, Inc., publishing as Prentice Hall. All rights reserved. Manufactured in the United States of America. -

System Design for a Computational-RAM Logic-In-Memory Parailel-Processing Machine
System Design for a Computational-RAM Logic-In-Memory ParaIlel-Processing Machine Peter M. Nyasulu, B .Sc., M.Eng. A thesis submitted to the Faculty of Graduate Studies and Research in partial fulfillment of the requirements for the degree of Doctor of Philosophy Ottaw a-Carleton Ins titute for Eleceical and Computer Engineering, Department of Electronics, Faculty of Engineering, Carleton University, Ottawa, Ontario, Canada May, 1999 O Peter M. Nyasulu, 1999 National Library Biôiiothkque nationale du Canada Acquisitions and Acquisitions et Bibliographie Services services bibliographiques 39S Weiiington Street 395. nie WeUingtm OnawaON KlAW Ottawa ON K1A ON4 Canada Canada The author has granted a non- L'auteur a accordé une licence non exclusive licence allowing the exclusive permettant à la National Library of Canada to Bibliothèque nationale du Canada de reproduce, ban, distribute or seU reproduire, prêter, distribuer ou copies of this thesis in microform, vendre des copies de cette thèse sous paper or electronic formats. la forme de microficbe/nlm, de reproduction sur papier ou sur format électronique. The author retains ownership of the L'auteur conserve la propriété du copyright in this thesis. Neither the droit d'auteur qui protège cette thèse. thesis nor substantial extracts fkom it Ni la thèse ni des extraits substantiels may be printed or otherwise de celle-ci ne doivent être imprimés reproduced without the author's ou autrement reproduits sans son permission. autorisation. Abstract Integrating several 1-bit processing elements at the sense amplifiers of a standard RAM improves the performance of massively-paralle1 applications because of the inherent parallelism and high data bandwidth inside the memory chip. -

ARM Cortex-A* Brian Eccles, Riley Larkins, Kevin Mee, Fred Silberberg, Alex Solomon, Mitchell Wills
ARM Cortex-A* Brian Eccles, Riley Larkins, Kevin Mee, Fred Silberberg, Alex Solomon, Mitchell Wills The ARM CortexA product line has changed significantly since the introduction of the CortexA8 in 2005. ARM’s next major leap came with the CortexA9 which was the first design to incorporate multiple cores. The next advance was the development of the big.LITTLE architecture, which incorporates both high performance (A15) and high efficiency(A7) cores. Most recently the A57 and A53 have added 64bit support to the product line. The ARM Cortex series cores are all made up of the main processing unit, a L1 instruction cache, a L1 data cache, an advanced SIMD core and a floating point core. Each processor then has an additional L2 cache shared between all cores (if there are multiple), debug support and an interface bus for communicating with the rest of the system. Multicore processors (such as the A53 and A57) also include additional hardware to facilitate coherency between cores. The ARM CortexA57 is a 64bit processor that supports 1 to 4 cores. The instruction pipeline in each core supports fetching up to three instructions per cycle to send down the pipeline. The instruction pipeline is made up of a 12 stage in order pipeline and a collection of parallel pipelines that range in size from 3 to 15 stages as seen below. The ARM CortexA53 is similar to the A57, but is designed to be more power efficient at the cost of processing power. The A57 in order pipeline is made up of 5 stages of instruction fetch and 7 stages of instruction decode and register renaming. -

Computer Architecture Research with RISC-‐V
Computer Architecture Research with RISC-V Krste Asanovic UC Berkeley, RISC-V Foundaon, & SiFive Inc. [email protected] www.riscv.org CARRV, Boston, MA October 14, 2017 Only Two Big Mistakes Possible when Picking Research ISA § Design your own § Use someone else’s Promise of using commercially popular ISAs for research § Ported applicaons/workloads to study § Standard soRware stacks (compilers, OS) § Real commercial hardware to experiment with § Real commercial hardware to validate models with § ExisAng implementaons to study / modify § Industry is more interested in your results 3 Types of projects and standard ISAs used by me or my group in last 30 years § Experiments on real hardware plaorms: - Transputer arrays, SPARC workstaons, MIPS workstaons, POWER workstaons, ARMv7 handhelds, x86 desktops/ servers § Research chips built around modified MIPS ISA: - T0, IRAM, STC1, Scale, Maven § FPGA prototypes/simulaons using various ISAs: - RAMP Blue (modified Microblaze), RAMP Gold/ DIABLO (SPARC v8) § Experiments using soRware architectural simulators: - SimpleScalar (PISA), SMTsim (Alpha), Simics (SPARC,x86), Bochs (x86), MARSS (x86), Gem5(SPARC), PIN (Itanium, x86), … § And of course, other groups used some others too. RealiMes of using standard ISAs § Everything only works if you don’t change anything - Stock binary applicaons - Stock libraries - Stock compiler - Stock OS - Stock hardware implementaon § Add a new instrucAon, get a new non-standard ISA! - Need source code for the apps and recompile - Impossible for most real interesAng applicaons -

Dop – a Cpu Core for Teaching Basics of Computer Architecture
DOP – A CPU CORE FOR TEACHING BASICS OF COMPUTER ARCHITECTURE Milos Becvar, Alois Pluhacek and Jiri Danecek Department of Computer Science and Engineering Faculty of Electrical Engineering Czech Technical University in Prague, Abstract: A simple 16-bit processor core called DOP and its teaching environment is presented. The DOP processor illustrates the basic principles of computer organization and is therefore used in the introductory hardware course. Its major features are simplicity, availability of an FPGA implementation and a C compiler. This paper presents the description of the core, HW and SW tools and teaching methodology. computing performance. The DOP processor core was 1. INTRODUCTION developed at our department together with various SW and HW visualization tools (Danecek et al., 1994a). An introductory computer hardware course should teach students to the fundamental principles of computer The goal of this paper is to describe this processor core internal functionality. Students, who are familiar with and its learning environment for teaching basics of programming in high-level languages, are required to computer organization. The paper is organized as understand the interaction between a processor, a follows - section 2 outlines the introductory course and memory and I/O devices, an internal organization of characterizes the students, section 3 describes the DOP processor, computer arithmetic and basics of digital processor core, section 4 describes the SW and HW design. Our experience has shown that it is not an easy tools supporting this processor and finally section 5 task for most of them. The functionality of the processor outlines the use of the DOP in our introductory course. -

Gpus: the Hype, the Reality, and the Future
Uppsala Programming for Multicore Architectures Research Center GPUs: The Hype, The Reality, and The Future David Black-Schaffer Assistant Professor, Department of Informaon Technology Uppsala University David Black-Schaffer Uppsala University / Department of Informaon Technology 25/11/2011 | 2 Today 1. The hype 2. What makes a GPU a GPU? 3. Why are GPUs scaling so well? 4. What are the problems? 5. What’s the Future? David Black-Schaffer Uppsala University / Department of Informaon Technology 25/11/2011 | 3 THE HYPE David Black-Schaffer Uppsala University / Department of Informaon Technology 25/11/2011 | 4 How Good are GPUs? 100x 3x David Black-Schaffer Uppsala University / Department of Informaon Technology 25/11/2011 | 5 Real World SoVware • Press release 10 Nov 2011: – “NVIDIA today announced that four leading applicaons… have added support for mul<ple GPU acceleraon, enabling them to cut simulaon mes from days to hours.” • GROMACS – 2-3x overall – Implicit solvers 10x, PME simulaons 1x • LAMPS – 2-8x for double precision – Up to 15x for mixed • QMCPACK – 3x 2x is AWESOME! Most research claims 5-10%. David Black-Schaffer Uppsala University / Department of Informaon Technology 25/11/2011 | 6 GPUs for Linear Algebra 5 CPUs = 75% of 1 GPU StarPU for MAGMA David Black-Schaffer Uppsala University / Department of Informaon Technology 25/11/2011 | 7 GPUs by the Numbers (Peak and TDP) 5 791 675 4 192 176 3 Intel 32nm vs. 40nm 36% smaller per transistor 2 244 250 3.0 Normalized to Intel 3960X 130 172 51 3.3 2.3 2.4 1 1.5 0.9 0 WaEs GFLOP Bandwidth -

Accelerating Applications with Pattern-Specific Optimizations On
Accelerating Applications with Pattern-specific Optimizations on Accelerators and Coprocessors Dissertation Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Linchuan Chen, B.S., M.S. Graduate Program in Computer Science and Engineering The Ohio State University 2015 Dissertation Committee: Dr. Gagan Agrawal, Advisor Dr. P. Sadayappan Dr. Feng Qin ⃝c Copyright by Linchuan Chen 2015 Abstract Because of the bottleneck in the increase of clock frequency, multi-cores emerged as a way of improving the overall performance of CPUs. In the recent decade, many-cores begin to play a more and more important role in scientific computing. The highly cost- effective nature of many-cores makes them extremely suitable for data-intensive computa- tions. Specifically, many-cores are in the forms of GPUs (e.g., NVIDIA or AMD GPUs) and more recently, coprocessers (Intel MIC). Even though these highly parallel architec- tures offer significant amount of computation power, it is very hard to program them, and harder to fully exploit the computation power of them. Combing the power of multi-cores and many-cores, i.e., making use of the heterogeneous cores is extremely complicated. Our efforts have been made on performing optimizations to important sets of appli- cations on such parallel systems. We address this issue from the perspective of commu- nication patterns. Scientific applications can be classified based on the properties (com- munication patterns), which have been specified in the Berkeley Dwarfs many years ago. By investigating the characteristics of each class, we are able to derive efficient execution strategies, across different levels of the parallelism. -

Bob Howard: the Laundry Series
Bob Howard: The Laundry Series free short stories by Charles Stross Table of Contents The Concrete Jungle..........................................1 Down on the Farm...........................................50 Overtime..........................................................72 Equoid..............................................................87 0 The Concrete Jungle I manage to pull on a sweater and jeans, tie my shoelaces, and get my ass downstairs just before by Charles Stross the blue and red strobes light up the window http://www.antipope.org/charlie/ above the front door. On the way out I grab my emergency bag — an overnighter full of stuff that Andy suggested I should keep ready, just in The death rattle of a mortally wounded case — and slam and lock the door and turn telephone is a horrible thing to hear at four around in time to find the cop waiting for me. o'clock on a Tuesday morning. It's even worse Are you Bob Howard? when you're sleeping the sleep that follows a Yeah, that's me. I show him my card. pitcher of iced margueritas in the basement of the Dog's Bollocks, with a chaser of nachos and If you'll come with me, sir. a tequila slammer or three for dessert. I come to, Lucky me: I get to wake up on my way in to sitting upright, bare-ass naked in the middle of work four hours early, in the front passenger the wooden floor, clutching the receiver with seat of a police car with strobes flashing and the one hand and my head with the other — purely driver doing his best to scare me into catatonia.