Control Software for Humanoid Robots
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ASSESSING the MAINTAINABILITY of C++ SOURCE CODE by MARIUS SUNDBAKKEN a Thesis Submitted in Partial Fulfillment of the Requireme
ASSESSING THE MAINTAINABILITY OF C++ SOURCE CODE By MARIUS SUNDBAKKEN A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer Science WASHINGTON STATE UNIVERSITY School of Electrical Engineering and Computer Science DECEMBER 2001 To the Faculty of Washington State University: The members of the Committee appointed to examine the thesis of MARIUS SUNDBAKKEN find it satisfactory and recommend that it be accepted. Chair ii ASSESSING THE MAINTAINABILITY OF C++ SOURCE CODE Abstract by Marius Sundbakken, M.S. Washington State University December 2001 Chair: David Bakken Maintenance refers to the modifications made to software systems after their first release. It is not possible to develop a significant software system that does not need maintenance because change, and hence maintenance, is an inherent characteristic of software systems. It has been estimated that it costs 80% more to maintain software than to develop it. Clearly, maintenance is the major expense in the lifetime of a software product. Predicting the maintenance effort is therefore vital for cost-effective design and development. Automated techniques that can quantify the maintainability of object- oriented designs would be very useful. Models based on metrics for object-oriented source code are necessary to assess software quality and predict engineering effort. This thesis will look at C++, one of the most widely used object-oriented programming languages in academia and industry today. Metrics based models that assess the maintainability of the source code using object-oriented software metrics are developed. iii Table of Contents 1. Introduction .................................................................................................................1 1.1. Maintenance and Maintainability....................................................................... -

Software Maintenance Maintenance Is Inevitable Types of Maintenance
SoftWindows 8/18/2003 Software Maintenance • Managing the processes of system change Reverse Engineering (Software Maintenance & Reengineering) © SERG Maintenance is Inevitable • The system requirements are likely to change while the system is being developed because the environment is changing. • When a system is installed in an environment it changes that environment and therefore changes the system requirements. Reverse Engineering (Software Maintenance & Reengineering) © SERG Types of Maintenance • Perfective maintenance – Changing a system to make it meet its requirements more effectively. • Adaptive maintenance – Changing a system to meet new requirements. • Corrective maintenance – Changing a system to correct deficiencies in the way meets its requirements. Reverse Engineering (Software Maintenance & Reengineering) © SERG Distributed Objects 1 SoftWindows 8/18/2003 Distribution of Maintenance Effort Corrective maintenance (17%) Adaptive maintenance Perfective (18%) maintenance (65%) Reverse Engineering (Software Maintenance & Reengineering) © SERG Evolving Systems • It is usually more expensive to add functionality after a system has been developed rather than design this into the system: – Maintenance staff are often inexperienced and unfamiliar with the application domain. – Programs may be poorly structured and hard to understand. – Changes may introduce new faults as the complexity of the system makes impact assessment difficult. – The structure may be degraded due to continual change. – There may be no documentation available to describe the program. Reverse Engineering (Software Maintenance & Reengineering) © SERG The Maintenance Process • Maintenance is triggered by change requests from customers or marketing requirements. • Changes are normally batched and implemented in a new release of the system. • Programs sometimes need to be repaired without a complete process iteration but this is dangerous as it leads to documentation and programs getting out of step. -

System Software Maintenance and Support 24X7
SYSTEM SOFTWARE MAINTENANCE AND SUPPORT SERVICES - PREMIUM These Premium System Software Maintenance and Support Service terms and conditions (“Terms and Conditions”) apply to any quote, order, order acknowledgment, and invoice, and any sale or provision of Premium System Software Maintenance and Support Services as defined herein provided to Customer by Viavi Solutions Inc. (“Viavi”), in addition to Viavi’s General Terms (“General Terms”) and/or Software License Terms, which are incorporated by reference herein and are either attached hereto, available at www.viavisolutions.com/terms or available upon request. k) Severity Level means classification of a problem determined by Viavi personnel 1. PURPOSE AND SCOPE based upon the Customer’s assessment of business impact. The three (3) Severity Levels that apply to the Services are as follows: These Terms and Conditions describe the Services that Viavi will provide to, and perform for, Customer. These Terms and Conditions apply to Services for standard Software, as 1) Problem Report – Critical means conditions that severely affect the defined herein, and are limited to the System configuration specified in a Statement of primary functionality of the System and because of the business impact to the Work (“SOW”) or other ordering document (i.e., a quote, order, order acknowledgment customer requires non-stop immediate corrective action, regardless of time of day or invoice) which contains a description of the System. All Services and Documentation or day of the week as viewed by a customer -
Reducing Power Consumption in Mobile Devices by Using a Kernel
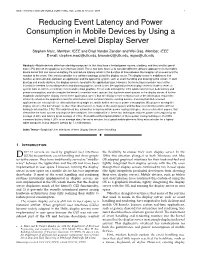
IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. Z, NO. B, AUGUST 2017 1 Reducing Event Latency and Power Consumption in Mobile Devices by Using a Kernel-Level Display Server Stephen Marz, Member, IEEE and Brad Vander Zanden and Wei Gao, Member, IEEE E-mail: [email protected], [email protected], [email protected] Abstract—Mobile devices differ from desktop computers in that they have a limited power source, a battery, and they tend to spend more CPU time on the graphical user interface (GUI). These two facts force us to consider different software approaches in the mobile device kernel that can conserve battery life and reduce latency, which is the duration of time between the inception of an event and the reaction to the event. One area to consider is a software package called the display server. The display server is middleware that handles all GUI activities between an application and the operating system, such as event handling and drawing to the screen. In both desktop and mobile devices, the display server is located in the application layer. However, the kernel layer contains most of the information needed for handling events and drawing graphics, which forces the application-level display server to make a series of system calls in order to coordinate events and to draw graphics. These calls interrupt the CPU which can increase both latency and power consumption, and also require the kernel to maintain event queues that duplicate event queues in the display server. A further drawback of placing the display server in the application layer is that the display server contains most of the information required to efficiently schedule the application and this information is not communicated to existing kernels, meaning that GUI-oriented applications are scheduled less efficiently than they might be, which further increases power consumption. -
Advancing Mac OS X Rootkit Detecron
Advancing Mac OS X Rootkit Detec4on Andrew Case (@attrc) Volatility Foundation Golden G. Richard III (@nolaforensix) University of New Orleans 2 hot research areas State of Affairs more established Live Forensics and Tradional Storage Memory Analysis Forensics Digital Forensics Reverse Engineering Incident Response Increasingly encompasses all the others Copyright 2015 by Andrew Case and Golden G. Richard III 3 Where’s the Evidence? Files and Filesystem Applica4on Windows Deleted Files metadata metadata registry Print spool Hibernaon Temp files Log files files files Browser Network Slack space Swap files caches traces RAM: OS and app data Volale Evidence structures Copyright 2015 by Andrew Case and Golden G. Richard III 4 Volale Evidence 1 011 01 1 0 1 111 0 11 0 1 0 1 0 10 0 1 0 1 1 1 0 0 1 0 1 1 0 0 1 Copyright 2015 by Andrew Case and Golden G. Richard III 5 Awesomeness Progression: File Carving Can carve Chaos: files, but More can't Faster Almost not very accurate Hurray! carve files well Tools Manual File type Fragmentaon, appear, MulDthreading, hex editor aware damned but have beer design stuff carving, et al spinning disks! issues Images: hLps://easiersaidblogdotcom.files.wordpress.com/2013/02/hot_dogger.jpg hLp://cdn.bigbangfish.com/555/Cow/Cow-6.jpg, hLp://f.tqn.com/y/bbq/1/W/U/i/Big_green_egg_large.jpg hLp://i5.walmarDmages.com/dfw/dce07b8c-bb22/k2-_95ea6c25-e9aa-418e-a3a2-8e48e62a9d2e.v1.jpg Copyright 2015 by Andrew Case and Golden G. Richard III 6 Awesomeness Progression: Memory Forensics Pioneering Chaos: More, efforts Beyond run more, show great Windows ?? strings? more promise pt_finder et al More aenDon Manual, Mac, … awesome but to malware, run strings, Linux, BSD liLle context limited filling in the gaps funcDonality Images: hLps://s-media-cache-ak0.pinimg.com/736x/75/5a/37/755a37727586c57a19d42caa650d242e.jpg,, hLp://img.photobucket.com/albums/v136/Hell2Pay77/SS-trucks.jpg hLp://skateandannoy.com/wp-content/uploads/2007/12/sportsbars.jpg, hLp://gainesvillescene.com/wp-content/uploads/2013/03/dog-longboard.jpg Copyright 2015 by Andrew Case and Golden G. -

Introduction to ROS – Robot Operating System –
Introduction to ROS – Robot Operating System – Daniel Serrano Department of Intelligent Systems, ASCAMM Technology Center Parc Tecnològic del Vallès, Av. Universitat Autònoma, 23 08290 Cerdanyola del Vallès SPAIN [email protected] ABSTRACT This paper gives an introduction to the open-source Robot Operating System (ROS. ROS has been widely adopted by the research robotics community as it provides a powerful software framework to develop autonomous unmanned systems. In this paper, we discuss some of the components that are available on the ROS repository. 1.0 INTRODUCTION The Robot Operating System (ROS) [1] is an open source robot operating system. It provides libraries and tools to help software developers create robot applications. It offers hardware abstraction, device drivers, libraries, visualizers, message-passing, package management, and more. ROS is similar in some respects to 'robot frameworks,' such as Player, YARP, Orocos, CARMEN, Orca, MOOS, and Microsoft Robotics Studio. The primary goal of ROS is to support code reuse in robotics research and development. It has been quickly adopted by many robotics research institutions and companies as their standard development framework. The list of robots using ROS is quite extent and it includes platforms from diverse domains, ranging from aerial and ground robots to humanoids and underwater vehicles. To name some, the humanoid robots PR-2 and REEM-C, ground robots such as the ClearPath platforms and aerial platforms such as the ones from Ascending Technologies are fully developed in ROS. Furthermore, a quite extent list of popular sensors for robots is already supported in ROS. To name some, sensors such as Inertial Measurement Units, GPS receivers, cameras and lasers can already be accessed from the drivers widely available on the ROS system. -

Chapter 1. Origins of Mac OS X
1 Chapter 1. Origins of Mac OS X "Most ideas come from previous ideas." Alan Curtis Kay The Mac OS X operating system represents a rather successful coming together of paradigms, ideologies, and technologies that have often resisted each other in the past. A good example is the cordial relationship that exists between the command-line and graphical interfaces in Mac OS X. The system is a result of the trials and tribulations of Apple and NeXT, as well as their user and developer communities. Mac OS X exemplifies how a capable system can result from the direct or indirect efforts of corporations, academic and research communities, the Open Source and Free Software movements, and, of course, individuals. Apple has been around since 1976, and many accounts of its history have been told. If the story of Apple as a company is fascinating, so is the technical history of Apple's operating systems. In this chapter,[1] we will trace the history of Mac OS X, discussing several technologies whose confluence eventually led to the modern-day Apple operating system. [1] This book's accompanying web site (www.osxbook.com) provides a more detailed technical history of all of Apple's operating systems. 1 2 2 1 1.1. Apple's Quest for the[2] Operating System [2] Whereas the word "the" is used here to designate prominence and desirability, it is an interesting coincidence that "THE" was the name of a multiprogramming system described by Edsger W. Dijkstra in a 1968 paper. It was March 1988. The Macintosh had been around for four years. -

Onload User Guide
Onload User Guide Copyright © 2017 SOLARFLARE Communications, Inc. All rights reserved. The software and hardware as applicable (the “Product”) described in this document, and this document, are protected by copyright laws, patents and other intellectual property laws and international treaties. The Product described in this document is provided pursuant to a license agreement, evaluation agreement and/or non‐disclosure agreement. The Product may be used only in accordance with the terms of such agreement. The software as applicable may be copied only in accordance with the terms of such agreement. Onload is licensed under the GNU General Public License (Version 2, June 1991). See the LICENSE file in the distribution for details. The Onload Extensions Stub Library is Copyright licensed under the BSD 2‐Clause License. Onload contains algorithms and uses hardware interface techniques which are subject to Solarflare Communications Inc patent applications. Parties interested in licensing Solarflare's IP are encouraged to contact Solarflare's Intellectual Property Licensing Group at: Director of Intellectual Property Licensing Intellectual Property Licensing Group Solarflare Communications Inc, 7505 Irvine Center Drive Suite 100 Irvine, California 92618 You will not disclose to a third party the results of any performance tests carried out using Onload or EnterpriseOnload without the prior written consent of Solarflare. The furnishing of this document to you does not give you any rights or licenses, express or implied, by estoppel or otherwise, with respect to any such Product, or any copyrights, patents or other intellectual property rights covering such Product, and this document does not contain or represent any commitment of any kind on the part of SOLARFLARE Communications, Inc. -

Robot Operating System - the Complete Reference (Volume 4) Part of the Studies in Computational Intelligence Book Series (SCI, Volume 831)
Book Robot Operating System - The Complete Reference (Volume 4) Part of the Studies in Computational Intelligence book series (SCI, volume 831) Several authors CISTER-TR-190702 2019 Book CISTER-TR-190702 Robot Operating System - The Complete Reference (Volume 4) Robot Operating System - The Complete Reference (Volume 4) Several authors CISTER Research Centre Rua Dr. António Bernardino de Almeida, 431 4200-072 Porto Portugal Tel.: +351.22.8340509, Fax: +351.22.8321159 E-mail: https://www.cister-labs.pt Abstract This is the fourth volume of the successful series Robot Operating Systems: The Complete Reference, providing a comprehensive overview of robot operating systems (ROS), which is currently the main development framework for robotics applications, as well as the latest trends and contributed systems. The book is divided into four parts: Part 1 features two papers on navigation, discussing SLAM and path planning. Part 2 focuses on the integration of ROS into quadcopters and their control. Part 3 then discusses two emerging applications for robotics: cloud robotics, and video stabilization. Part 4 presents tools developed for ROS; the first is a practical alternative to the roslaunch system, and the second is related to penetration testing. This book is a valuable resource for ROS users and wanting to learn more about ROS capabilities and features. © 2019 CISTER Research Center 1 www.cister-labs.pt Studies in Computational Intelligence 831 Anis Koubaa Editor Robot Operating System (ROS) The Complete Reference (Volume 4) Studies in Computational Intelligence Volume 831 Series Editor Janusz Kacprzyk, Polish Academy of Sciences, Warsaw, Poland [email protected] The series “Studies in Computational Intelligence” (SCI) publishes new develop- ments and advances in the various areas of computational intelligence—quickly and with a high quality. -

Programmer's Guide
Programmer’s Guide Release 18.11.11 Jan 20, 2021 CONTENTS 1 Introduction 1 1.1 Documentation Roadmap...............................1 1.2 Related Publications..................................2 2 Overview 3 2.1 Development Environment..............................3 2.2 Environment Abstraction Layer............................4 2.3 Core Components...................................4 2.3.1 Ring Manager (librte_ring)..........................4 2.3.2 Memory Pool Manager (librte_mempool)..................4 2.3.3 Network Packet Buffer Management (librte_mbuf).............6 2.3.4 Timer Manager (librte_timer)........................6 2.4 Ethernet* Poll Mode Driver Architecture.......................6 2.5 Packet Forwarding Algorithm Support........................6 2.6 librte_net........................................6 3 Environment Abstraction Layer7 3.1 EAL in a Linux-userland Execution Environment..................7 3.1.1 Initialization and Core Launching......................8 3.1.2 Shutdown and Cleanup...........................8 3.1.3 Multi-process Support............................8 3.1.4 Memory Mapping Discovery and Memory Reservation..........8 3.1.5 Support for Externally Allocated Memory.................. 11 3.1.6 Per-lcore and Shared Variables....................... 12 3.1.7 Logs...................................... 12 3.1.8 CPU Feature Identification.......................... 12 3.1.9 User Space Interrupt Event......................... 13 3.1.10 Blacklisting.................................. 14 3.1.11 Misc Functions............................... -

Kqueue Madness Have to Ponder These Questions Or Write a Began
Kqueuemadness by Randall Stewart ome time ago I was asked to participate in the creation of a Performance SEnhancing Proxy (PEP) for TCP. The concept behind a PEP is to split a TCP connec- tion into three separate connections. The first connection (1) is the normal TCP con- nection that goes from the client towards the server (the client is usually unaware that its connection is not going to the end server). The next connection (2) goes between two middle boxes (M1 and M2), the first middle box (M1) terminates the connection of the client pretending to be the server and uses a different connection to talk to the tail middle box (M2). This middle connection provides the “enhanced” service to the end-to-end connection. The final connection (3) goes between the tail middle box (M2) and the actual server. The figure below shows a diagram of such a connection. A connection (1) (2) (3) through a PEP Client M1 M2 Server 24 FreeBSD Journal Now, as you can imagine, if you have a very event for a socket descriptor, yet do not close busy PEP you could end up with thousands of the socket? TCP connections being managed by M1 and b) Could I possibly see stale queued events M2. In such an environment using poll(2) or that were yet to be read? select(2) comes with an extreme penalty. Each c) How does connect interact with kqueue? time a I/O event completes, every one of those d) What about listen? thousands of connections would need to be e) What is the difference between all of the looked at to see if an event occurred on them, kqueue flags that I can add on to events and and then the appropriate structure would need when do I use them properly? to be reset to look for an event next time. -

Software Engineering Software Maintenance
SOFTWARE ENGINEERING SOFTWARE MAINTENANCE Software maintenance is the process of modification or making changes in the system after delivery to overcome errors and faults in the system that were not uncovered during the early stages of the development cycle. LEARNING OBJECTIVES • To study on why maintenance is an issue. • To study on reverse engineering and limitations. • To organize data. • To check what the system does. SOFTWARE MAINTENANCE The IEEE Standard for Software Maintenance (IEEE 1219) gave the definition for software maintenance as “The process of modifying a software system or component after delivery to correct faults, improves performance or other attributes, or adapt to a changed environment.” Maintenance Principles 100 Hardware Development 60 Software 20 Maintenance Percent of total cost total of Percent 1995 2000 2010 The IEEE/EIA 12207 Standard defines maintenance as modification to code and associated documentation due to a problem or the need for improvement. Nature of Maintenance Modification requests are logged and tracked, the impact of proposed changes are determined, code and other software artifacts are modified, testing is conducted, and a new version of the software product is released. Maintainers can learn from the developer´s knowledge of the software. Need for Maintenance Maintenance must be performed in order to: • Correct faults. • Improve the design. • Implement enhancements. • Interface with other systems. • Adapt programs so that different hardware, software, system features, and telecommunications facilities can be used. • Migrate legacy software. • Retire software Tasks of a maintainer The maintainer does the following functions: • Maintain control over the software´s day-to-day functions. • Maintain control over software modification.