A Fast and Compact Solver for the Shallow Water Equations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Ahead of the Wave
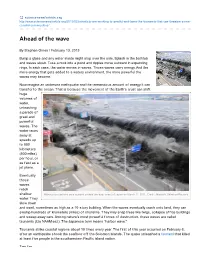
sciencenewsf o rkids.o rg http://www.sciencenewsforkids.org/2013/02/scientists-are-working-to-predict-and-tame-the-tsunamis-that-can-threaten-some- coastal-communities/ Ahead of the wave By Stephen Ornes / February 13, 2013 Bump a glass and any water inside might slop over the side. Splash in the bathtub and waves slosh. Toss a rock into a pond and ripples move outward in expanding rings. In each case, the water moves in waves. Those waves carry energy. And the more energy that gets added to a watery environment, the more powerf ul the waves may become. Now imagine an undersea earthquake and the tremendous amount of energy it can transf er to the ocean. That is because the movement of the Earth’s crust can shif t huge volumes of water, unleashing a parade of great and powerf ul waves. The water races away at speeds up to 800 kilometers (500 miles) per hour, or as f ast as a jet plane. Eventually those waves reach shallow Wate r p o urs asho re as a tsunami strike s the e ast co ast o f Jap an o n March 11, 2011. Cre d it: Mainichi Shimb un/Re ute rs water. They slow down and swell, sometimes as high as a 10-story building. When the waves eventually crash onto land, they can swamp hundreds of kilometers (miles) of shoreline. They may snap trees like twigs, collapse of f ice buildings and sweep away cars. Among nature’s most powerf ul f orces of destruction, these waves are called tsunamis (tzu NAAM eez). -

Documenting Inuit Knowledge of Coastal Oceanography in Nunatsiavut
Respecting ontology: Documenting Inuit knowledge of coastal oceanography in Nunatsiavut By Breanna Bishop Submitted in partial fulfillment of the requirements for the degree of Master of Marine Management at Dalhousie University Halifax, Nova Scotia December 2019 © Breanna Bishop, 2019 Table of Contents List of Tables and Figures ............................................................................................................ iv Abstract ............................................................................................................................................ v Acknowledgements ........................................................................................................................ vi Chapter 1: Introduction ............................................................................................................... 1 1.1 Management Problem ...................................................................................................................... 4 1.1.1 Research aim and objectives ........................................................................................................................ 5 Chapter 2: Context ....................................................................................................................... 7 2.1 Oceanographic context for Nunatsiavut ......................................................................................... 7 2.3 Inuit knowledge in Nunatsiavut decision making ......................................................................... -

SPH Based Shallow Water Simulation
Workshop on Virtual Reality Interaction and Physical Simulation VRIPHYS (2011) J. Bender, K. Erleben, and E. Galin (Editors) SPH Based Shallow Water Simulation Barbara Solenthaler1 Peter Bucher1 Nuttapong Chentanez2 Matthias Müller2 Markus Gross1 1ETH Zurich 2NVIDIA PhysX Research Abstract We present an efficient method that uses particles to solve the 2D shallow water equations. These equations describe the dynamics of a body of water represented by a height field. Instead of storing the surface heights using uniform grid cells, we discretize the fluid with 2D SPH particles and compute the height according to the density at each particle location. The particle discretization offers the benefits that it simplifies the use of sparsely filled domains and arbitrary boundary geometry. Our solver can handle terrain slopes and supports two-way coupling of the particle-based height field with rigid objects. An improved surface definition is presented that reduces visible bumps related to the underlying particle representation. It furthermore smoothes areas with separating particles to achieve better rendering results. Both the physics and the rendering are implemented on modern GPUs resulting in interactive performances in all our presented examples. Categories and Subject Descriptors (according to ACM CCS): I.3.5 [Computer Graphics]: Computational Geometry and Object Modeling—Physically Based Modeling; I.3.7 [Computer Graphics]: Three-Dimensional Graphics and Realism—Animation and Virtual Reality 1. Introduction in height field methods as well as in full 3D simulations. The grid discretization allows for efficient simulations, but Physically-based simulations have become an important el- handling irregular domain boundaries that are not aligned ement of real-time applications like computer games. -

Dan-Tipp-Corryvreckan.Pdf
Corryvreckan The name ‘Corryvreckan’ probably derives from two words ‘Coire’ which in Irish means cauldron and ‘Breccán’ or ‘Breacan’, which is taken to be a proper noun i.e. the name of an individual called Breccán. Although this has also been translated as ‘speckled’ from the adjective brecc ‘spotted, speckled’ etc. combined with the suffix of place – an. There is an Old Irish text known as Cormac’s Glossary written by the then King and Bishop of Cashel, Cormac mac Cuilennáin who died in the year 908. The text is written in the form of Dictionary combined with an encyclopaedia. In it are various attempts at providing explanations, meanings and the significances of various words. At entry 323 it provides probably the fullest description of the Coire Breccáin of the early Irish material, a great whirlpool which is between Ireland and Scotland to the north, in the meeting of various seas, viz., the sea which encompasses Ireland at the north-west, and the sea which encompasses Scotland at the north-east, and the sea to the south between Ireland and Scotland. They whirl around like moulding compasses, each of them taking the place of the other, like the paddles… of a millwheel, until they are sucked into the depths so that the cauldron remains with its mouth wide open; and it would suck even the whole of Ireland into its yawning gullet. It vomits iterum {again & again} that draught up, so that its thunderous eructation and its bursting and its roaring are heard among the clouds, like the steam boiling of a caldron of fire.i This form of description was known in Irish as a Dindshenchas (pronounced dunn- hanakus) tale. -

UC San Diego UC San Diego Electronic Theses and Dissertations
UC San Diego UC San Diego Electronic Theses and Dissertations Title Gyre Plastic : Science, Circulation and the Matter of the Great Pacific Garbage Patch Permalink https://escholarship.org/uc/item/21w9h64q Author De Wolff, Kim Publication Date 2014 Peer reviewed|Thesis/dissertation eScholarship.org Powered by the California Digital Library University of California UNIVERSITY OF CALIFORNIA, SAN DIEGO Gyre Plastic: Science, Circulation and the Matter of the Great Pacific Garbage Patch A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Communication by Kim De Wolff Committee in charge: Professor Chandra Mukerji, Chair Professor Joseph Dumit Professor Kelly Gates Professor David Serlin Professor Charles Thorpe 2014 Copyright Kim De Wolff, 2014 All rights reserved. The Dissertation of Kim De Wolff is approved, and it is acceptable in quality and form for publication on microfilm and electronically: Chair University of California, San Diego 2014 iii TABLE OF CONTENTS Signature Page ........................................................................................................... iii Table of Contents ....................................................................................................... iv List of Figures ............................................................................................................ vi Acknowledgements .................................................................................................... ix Vita ............................................................................................................................ -

Wake Synthesis for Shallow Water Equation
Pacific Graphics 2012 Volume 31 (2012), Number 7 C. Bregler, P. Sander, and M. Wimmer (Guest Editors) The definitive version is available at http://diglib.eg.org/ and http://onlinelibrary.wiley.com/. Wake Synthesis For Shallow Water Equation Zherong Pan1 Jin Huangy1 Yiying Tong2 Hujun Bao1 1State Key Lab of CAD&CG, Zhejiang University, China, 2Michigan State University, USA Abstract In fluid animation, wake is one of the most important phenomena usually seen when an object is moving relative to the flow. However, in current shallow water simulation for interactive applications, this effect is greatly smeared out. In this paper, we present a method to efficiently synthesize these wakes. We adopt a generalized SPH method for shallow water simulation and two way solid fluid coupling. In addition, a 2D discrete vortex method is used to capture the detailed wake motions behind an obstacle, enriching the motion of SWE simulation. Our method is highly efficient since only 2D simulation is required. Moreover, by using a physically inspired procedural approach for particle seeding, DVM particles are only created in the wake region. Therefore, very few particles are required while still generating realistic wake patterns. When coupled with SWE, we show that these patterns can be seen using our method with marginal overhead. Categories and Subject Descriptors (according to ACM CCS): I.3.7 [Computer Graphics]: Three Dimensional Graph- ics and Realism—Animation 1. Introduction Liquid animation is among the most stunning visual effects in computer graphics. The field has witnessed great progress in the last ten years, readily handling viscous flow, surface tension and multiphase scenarios. -

Marine Renewable Energy and Environmental Impacts
Acknowledgements Thank you to all of the reviewers, editors, and graphic designers that made this report possible: Jennifer DeLeon Vicki Frey Melissa Foley Madalaine Jong Kelly Keen Cy Oggins Carrie Pomeroy Erin Prahler Sarah Sugar Cover Photo Storm Surf Courtesy of James Fortman Contents Tables ........................................................................................................................................................... iv Figures .......................................................................................................................................................... iv Use of Terms ................................................................................................................................................ vi Acronyms ..................................................................................................................................................... vii Summary Table........................................................................................................................................... viii 1 Introduction ......................................................................................................................................... 1-1 2 Matrix ................................................................................................................................................. 2-1 3 Offshore Energy Potential of California and Project Siting ............................................................... 3-1 3.1 Wave Energy -

1. Wind Driven 2. Rogue 3. Tsunami 4.Tidal 5. Underwater Or Undersea
WAVES We will discuss 5 different kinds of waves: 1. Wind driven 2. Rogue 3. Tsunami 4.Tidal 5. Underwater or undersea Waves are important to people since the have an impact on life in the ocean, travel on the ocean and land near the ocean. So we need to look at some of the different types of waves and how they have an impact on things. WIND DRIVEN WAVES While there are many kinds of motions in the ocean, probably the most obvious are the waves. We need a way to discuss waves, so first we need to see how they are measured Waves are measured in specific ways There are many kinds of waves as well. Most of the waves are called “wind driven waves”. These waves are caused by two fluids of different densities moving across one another. In this case one is air the other is water. (You can notice this on a small scale if you blow across a cup of water, or coffee. When you try to cool the liquid and blow across the surface you will notice small “ripples” forming. It is the same principle.) As the wind blows across the water, it sets small “capillary” waves in motion. These are often called “ripples”. (The surface tension of the water, works to end them) These ripples give greater surface area for the wind to blow against and the waves become larger. (These are called “gravity waves” because the force of gravity works to pull them back down to a level ocean.) The area where wind driven waves are created are called “seas”. -

Meeting the Maelstrom
WILDLIFE MEETING THE MAELSTROM Meeting the maelstrom he dictionary gives the meaning of the word ‘maelstrom’ as a confused, diso- The Corryvreckan whirlpool is the world’s third largest and its massive T rientated state of affair; an irresistably overpowering influence for destruction. It is tidal upswellings and boiling waters make for a memorable experience a description that suits the Coire Bhreacain WORDS & IMAGES POLLY PULLAR – translated from the Gaelic as the Caul- dron of the Speckled Seas and better known as the Corryvreckan Whirlpool. It is situated between the islands of Jura and Scarba, where its extremely unusual underwater topography and rock ridges, including a pinnacle called the Hag, have created the world’s third largest whirlpool. As fast flowing tides hit this pinna- cle they cause massive upwellings, causing the water to churn capriciously like a vast boiling vat, a froth-filled cauldron of erratic and volatile activity. Depending on the weather, standing waves are sometimes produced, some as much as 15 feet high. The whirlpool is also renowned for its folk- lore, in particular the tale of the Hag goddess, Cailleach Bheur, who is said to use the gulf to wash her long trailing plait and usher in the change from autumn to winter. As winter approaches, she then uses the water as a washtub and the sound of the roaring turbu- lence can be heard up to ten miles away. Modern-day Hans Christian Andersons spin misleading information and inaccurate statistics about Corryvreckan. It is frequently recorded that the tide race may be up to 16 knots but the fastest it has been recorded is 8½ knots. -

Seiches and Harbor Oscillations
July 31, 2009 8:18 9.75in x 6.5in b684-ch09 FA Chapter 9 Seiches and Harbor Oscillations Alexander B. Rabinovich P.P. Shirshov Institute of Oceanology, Russian Academy of Sciences 36 Nakhimovsky Prosp., Moscow, 117997 Russia Department of Fisheries and Oceans, Institute of Ocean Sciences 9860 West Saanich Road, Sidney, BC, Canada V8L 4B2 [email protected] [email protected] This chapter presents an overview of seiches and harbor oscillations. Seiches are long-period standing oscillations in an enclosed basin or in a locally isolated part of a basin. They have physical characteristics similar to the vibrations of a guitar string or an elastic membrane. The resonant (eigen) periods of seiches are deter- mined by basin geometry and depth and in natural basins may range from tens of seconds to several hours. The set of seiche eigen frequencies (periods) and asso- ciated modal structures are a fundamental property of a particular basin and are independent of the external forcing mechanism. Harbor oscillations (coastal seiches) are a specific type of seiche motion that occur in partially enclosed basins (bays, fjords, inlets, and harbors) that are connected through one or more openings to the sea. In contrast to seiches, which are generated by direct external forcing (e.g., atmospheric pressure, wind, and seismic activity), harbor oscillations are mainly generated by long waves entering through the open boundary (harbor entrance) from the open sea. Energy losses of seiches in enclosed basins are mostly due to dissipative processes, while the decay of harbor oscillations is primarily due to radiation through the mouth of the harbor. -
Revisiting the Oceanographic Processes
International Training Centre for Operational Oceanography (ITCOocean), Hyderabad, India. Revisiting the Oceanographic Processes Manickavasagam S, Assistant Professor 20 April, 2021 Fishery Oceanography for Future Professionals 19 – 23 April, 2021 Content of the Lecture Introduction to Oceanography and Types Why Oceanography is Important? What Causes Ocean to Circulate? Revisiting the Oceanographic Processes - Fisheries Production Conclusion 1 of 30 Introduction to Oceanography Definition “Oceanography is the study of the ocean, with emphasis on its character as an environment” The shape, size, depth and bottom relief of ocean, distribution of oceans,ocean currents and various life forms existing in ocean are also studied under oceanography Types Physical Oceanography (Temperature,Currents,Tides,Winds and Depth) Chemical Oceanography (Salinity, Nutrients (NO3,PO4,Si&Fe) and DO) Biological Oceanography(Primary productivity and Fisheries production) Geological Oceanography (Earth properties) 2 of 30 Why Oceanography is Important? Management of marine living resources for sustainable use (Marine Fisheries) Detecting and forecasting of oceanic parameters such as SST, Ocean Colour (Chlorophyll), Sea surface height (elevation) and surface roughness etc., Protection and conservation of marine ecosystems (Coral Reefs,Mangroves,Seagrass,Mudflats) Prediction and mitigation of Natural Hazards (Tsunami, Storm Surges, Cyclones and Coral bleaching) National Security (Navy and Coast Guard) Assisting marine merchants for safe and efficient -

Oceanography of the British Columbia Coast
CANADIAN SPECIAL PUBLICATION OF FISHERIES AND AQUATIC SCIENCES 56 DFO - L bra y / MPO B bliothèque Oceanography RI II I 111 II I I II 12038889 of the British Columbia Coast Cover photograph West Coast Moresby Island by Dr. Pat McLaren, Pacific Geoscience Centre, Sidney, B.C. CANADIAN SPECIAL PUBLICATION OF FISHERIES AND AQUATIC SCIENCES 56 Oceanography of the British Columbia Coast RICHARD E. THOMSON Department of Fisheries and Oceans Ocean Physics Division Institute of Ocean Sciences Sidney, British Columbia DEPARTMENT OF FISHERIES AND OCEANS Ottawa 1981 ©Minister of Supply and Services Canada 1981 Available from authorized bookstore agents and other bookstores, or you may send your prepaid order to the Canadian Government Publishing Centre Supply and Service Canada, Hull, Que. K1A 0S9 Make cheques or money orders payable in Canadian funds to the Receiver General for Canada A deposit copy of this publication is also available for reference in public librairies across Canada Canada: $19.95 Catalog No. FS41-31/56E ISBN 0-660-10978-6 Other countries:$23.95 ISSN 0706-6481 Prices subject to change without notice Printed in Canada Thorn Press Ltd. Correct citation for this publication: THOMSON, R. E. 1981. Oceanography of the British Columbia coast. Can. Spec. Publ. Fish. Aquat. Sci. 56: 291 p. for Justine and Karen Contents FOREWORD BACKGROUND INFORMATION Introduction Acknowledgments xi Abstract/Résumé xii PART I HISTORY AND NATURE OF THE COAST Chapter 5. Upwelling: Bringing Cold Water to the Surface Chapter 1. Historical Setting Causes of Upwelling 79 Origin of the Oceans 1 Localized Effects 82 Drifting Continents 2 Climate 83 Evolution of the Coast 6 Fishing Grounds 83 Early Exploration 9 El Nifio 83 Chapter 2.