Adaptive Trajectory Planning for Flight Management Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
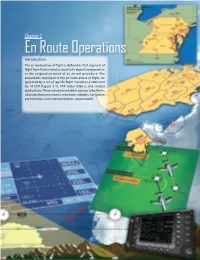
Chapter: 2. En Route Operations
Chapter 2 En Route Operations Introduction The en route phase of flight is defined as that segment of flight from the termination point of a departure procedure to the origination point of an arrival procedure. The procedures employed in the en route phase of flight are governed by a set of specific flight standards established by 14 CFR [Figure 2-1], FAA Order 8260.3, and related publications. These standards establish courses to be flown, obstacle clearance criteria, minimum altitudes, navigation performance, and communications requirements. 2-1 fly along the centerline when on a Federal airway or, on routes other than Federal airways, along the direct course between NAVAIDs or fixes defining the route. The regulation allows maneuvering to pass well clear of other air traffic or, if in visual meteorogical conditions (VMC), to clear the flightpath both before and during climb or descent. Airways Airway routing occurs along pre-defined pathways called airways. [Figure 2-2] Airways can be thought of as three- dimensional highways for aircraft. In most land areas of the world, aircraft are required to fly airways between the departure and destination airports. The rules governing airway routing, Standard Instrument Departures (SID) and Standard Terminal Arrival (STAR), are published flight procedures that cover altitude, airspeed, and requirements for entering and leaving the airway. Most airways are eight nautical miles (14 kilometers) wide, and the airway Figure 2-1. Code of Federal Regulations, Title 14 Aeronautics and Space. flight levels keep aircraft separated by at least 500 vertical En Route Navigation feet from aircraft on the flight level above and below when operating under VFR. -

Effective Flight Plans Can Help Airlines Economize
While flight plan calculations are necessary for safety and regulatory compliance, they also provide airlines with an opportunity for cost optimization. Effective Flight Plans Can Help Airlines Economize By Steve Altus, Ph.D., Senior Scientist, Airline Operations Product Development, Jeppesen Every commercial airline flight begins with a flight plan. Over time, small adjustments to each flight plan can add up to substantial savings across a fleet. Optimal overall performance is influenced by many factors, including dynamic route optimization, accurate flight plans, optimal use of redispatch, and dynamic airborne replanning. While all airlines use computerized flight planning systems, investing in a higher-end system — and in the effort to use it to its full capability — has significant impact on both profitability and the environment. An operational flight plan is required to This article provides a brief overview of and lost revenue from payload that can’t ensure an airplane meets all of the flight planning and discusses ways that flight be carried. These variations are subject to operational regulations for a specific flight, planning systems can be used to reduce airplane performance, weather, allowed to give the flight crew information to help operational costs and help the environment. route and altitude structure, schedule them conduct the flight safely, and to constraints, and operational constraints. coordinate with air traffic control (ATC). FLIGHT PLanninG FUndaMentaLS Computerized systems for calculating OptiMIZinG FLIGHT PLans flight plans have been widely used for A flight plan includes the route the crew will decades, but not all systems are the fly and specifies altitudes and speeds.I t also While flight plan calculations are necessary same. -

ATP IFR Flight Planning Training Supplement
IFR Flight Planning Training Supplement ATPFlightSchool.com Revised 2018-12-03 Revised 2018-12-03 Copyright © 2018 Airline Transport Professionals. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means electronic, mechanical or otherwise, without the prior written permission of Airline Transport Professionals. To view recent changes to this supplement, visit: atpflightschool.com/changes/supp-ifr Contents Introduction .................................... 1 Pre- Planning Preparation .............. 2 Overview ..................................................... 2 Weather ....................................................... 3 NOTAMs ...................................................... 5 Preferred Routes ....................................... 5 Departure Segment Planning........ 6 Departure Airport Information ................... 6 Takeoff Minimums ...................................... 6 Departure Procedure ................................. 6 Top of Climb Calculations ........................... 7 Arrival Segment Planning .............. 8 Arrival Procedure ....................................... 8 Descent Planning ....................................... 9 Arrival Airport Information .......................10 Choosing an Alternate ..............................10 Enroute Segment Planning .......... 11 Federal Airway Routing .............................11 Direct Routing Between Navaids or Fixes 12 IFR Altitudes .............................................12 Cruise Performance -
Operator's Flight Safety Handbook, Issue 2
THIS PAGE INTENTIONALLY LEFT BLANK CEO STATEMENT ON CORPORATE SAFETY CULTURE COMMITMENT Corporate Safety Culture Commitment i June 2000 Issue 1 CORE VALUES Among our core values, we will include: l Safety, health and the environment l Ethical behaviour l Valuing people FUNDAMENTAL BELIEFS Our fundamental safety beliefs are: l Safety is a core business and personal value l Safety is a source of our competitive advantage l We will strengthen our business by making safety excellence an integral part of all flight and ground activities l We believe that all accidents and incidents are preventable l All levels of line management are accountable for our safety performance, starting with the Chief Executive Officer (CEO)/Managing Director CORE ELEMENTS OF OUR SAFETY APPROACH The five core elements of our safety approach include: Top Management Commitment l Safety excellence will be a component of our mission l Senior leaders will hold line management and all employees accountable for safety performance l Senior leaders and line management will demonstrate their continual commitment to safety Responsibility & Accountability of All Employees l Safety performance will be an important part of our management/employee evaluation system l We will recognise and reward flight and ground safety performance l Before any work is done, we will make everyone aware of the safety rules and processes as well as their personal responsibility to observe them Clearly Communicated Expectations of Zero Incide nts l We will have a formal written safety goal, and we -

Quantifying the Impact of Flight Predictability on Strategic and Operational Airline Decisions
Quantifying the Impact of Flight Predictability on Strategic and Operational Airline Decisions by Lu Hao A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Engineering – Civil and Environmental Engineering in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Mark Hansen, Chair Professor Joan Walker Professor Rhonda Righter Spring 2015 Abstract Quantifying the Impact of Flight Predictability on Strategic and Operational Airline Decisions by Lu Hao Doctor of Philosophy in Engineering – Civil and Environmental Engineering University of California, Berkeley Professor Mark Hansen, Chair In this thesis, we examine how the predictability of travel time affects both the transportation service providers’ strategic and operational decisions, in the context of air transportation. Towards this end, we make three main contributions. The first is the development of accurately measuring predictability of travel time in air transportation to best model airline decision behavior. The measure is sensitive to the different nature that’s driving the decision. The second is an empirical investigation of the relationship between the best-measured travel time predictability and the transportation service providers’ strategic and operational decisions to gain insights into the significance of the impact of predictability. The third contribution is proposing an algorithm to improve predictability in order to save cost in the strategic decision process through re-sequencing the departure queue at the airport. We consider the strategic decision as the setting of the scheduled travel time for each trip that typically happened six months before the travel date. On the operational side, we investigate into the decision of the amount of fuel loaded to each flight in the daily operation. -
ATP VFR Flight Planning Training Supplement Will Guide You Through the Flight Planning Process
VFR Flight Planning Training Supplement ATPFlightSchool.com Revised 2018-12-03 Revised 2018-12-03 Copyright © 2018 Airline Transport Professionals. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means electronic, mechanical or otherwise, without the prior written permission of Airline Transport Professionals. Introduction The ATP VFR Flight Planning Training Supplement will guide you through the flight planning process. It will utilize the resources available to you as an ATP student. This supplement is designed as an exercise to demonstrate that you understand the important relationships and concepts of VFR flight planning. The contents of this supplement apply to all ATP aircraft types, but performance from the C172S Model will be used for all sample charts. Required Items Prerequisites • Successful completion of the iPad ATP Private Pilot Self-Study Course through Module 12 • Thorough understanding of all concepts involved in VFR flight planning iPad • ForeFlight App with DUATS login and WiFi Access • ATP Flight School App Books & Publications • Cessna 172S Model POH (iPad) • Airport Facility Directory (AF/D) (iPad) • Current paper sectional for areas of flight - ForeFlight sectionals are not acceptable for this exercise • 3 copies of the ATP Nav Log • ATP Weight & Balance Form (if in PA-44 Seminole) • ATP’s Airworthiness Checklist • VFR Flight Planning Supplement Worksheet Tools • Plotter • E6B computer • Calculator • Scratch paper and pencil For Your Checkride • The POH for your n-numbered checkride aircraft • The maintenance logbook for your n-numbered checkride aircraft Introduction • 1 SECTION 1 Initial Planning Overview Resources • ForeFlight • POH • Scratch paper and pencil Complete Table 1.1 on the VFR Flight Planning Supplement Worksheet. -
FAA ICAO Flight Planning Interface Reference Guide Version 2.1
En Route and Oceanic Services Aeronautical Information and Flight Planning Enhancements FAA ICAO Flight Planning Interface Reference Guide Version 2.1 Federal Aviation Administration November 15, 2012 Air Traffic Organization En Route and Oceanic Services, ATO-E Technical Performance Support Group , AJE- 36 FAA ICAO Flight Planning Interface Reference Guide Table of Contents 1. Introduction ................................................................................................................................... 7 1.1 Scope ........................................................................................................................... 7 1.2 Background ................................................................................................................ 7 1.3 FAA FPL Services ...................................................................................................... 8 1.4 Document Organization ........................................................................................... 8 2. Operational Use of Flight Planning Messages .......................................................................... 8 2.1 Initial FPL Filing ........................................................................................................ 8 2.1.1 Flights Remaining Entirely within U.S. Domestic Airspace ............................... 8 2.1.2 Flights Leaving U.S. Domestic Airspace ................................................................ 9 2.1.3 Flights Entering U.S. Domestic Airspace (from or Through -

Flight Planning Made Easy
Flight planning made easy. SM ARINCDirect FLIGHT PLANNING Our ARINCDirectSM desktop and mobile flight support service applications offer you a complete suite of tools and support services to efficiently and effectively operate your flight department and aircraft. Create and file electronic flight plans anywhere worldwide, using aircraft performance data and the latest atmospheric forecasts for the most precise fuel burns and time calculations. Run flight plans. Check weight and balance. Track flights. Monitor weather conditions. Manage fuel costs via our tankering functionality. And much more. All from the industry leader in business aviation technology and unparalleled in customer service. Flight planning features Weather services > Flight plan computation and filing > Integrated flight risk assessment tool > Mapping application with worldwide enroute > Flight hazard alerting charts and weather overlays > Worldwide managed NOTAMs > Weight and balance computations/load manifest > Passenger weather briefings with company logo > Aircraft performance calculations > Web – text and graphical weather > Runway analysis including obstacle data > Flight deck – text and graphical weather > FlightRisk and Vector SMS real-time assessment and analysis tools Live flight tracking > Critical fuel summaries/ETP calculations > Graphical aircraft tracking tool (FlightAware) > Multi-leg tankering computations > Air Traffic Control data from over 50 countries > Route cost comparison > Aircraft data link position reports > Recently and frequently cleared routes -

Cross County Flight Planning
For Training Only CROSS COUNTRY FLIGHT PLANNING (FLIGHT PROFILE) The purpose of a flight profile is to allow you to complete your cross-country flight while avoiding an off-field landing. In the first part of a flight profile you determine the altitude you need at different points along the way to glide back home. Eventually you will reach a position where you have both enough altitude to glide back home and enough altitude to glide to your destination. This position is called the decision point or the go / no-go point. The completed flight profile will look something like this example: The flight profile is prepared as part of your flight planning before you take off. It Is not something that can be done in flight. Your Check Ride: Preparing a cross-country profile is a required task for your check ride. You will be expected to draw the flight profile before your check ride for a cross- country flight on that day. You will not actually fly the cross country flight; however, the examiner will ask you questions about planning and executing a cross country flight. Your cross-country flight will have two legs. As an example, planning to fly from Crystal to Big Bear City (46CN to L35) via Hesperia (L26). There are six steps in preparing a cross-country profile: I) Use the aeronautical chart to plot the cross county flight, 2) Calculate two glide ratios over the ground (one flying into a headwind, the other flying with a tailwind), 3) Find the wind speed and direction aloft 4) Determine how much altitude you need to fly one mile with each glide ratio, 5) Prepare a table of altitudes needed in one-mile increments to glide to each airfield 6) Plot the flight profile. -
Flight Planning Using an Aeronautical Chart
Flight Planning Using an Aeronautical Chart By Laura Million INTRODUCTION When a driver in an automobile takes a trip, one hops in the car and drives. Signs along the highway will point the way to the final destination. When a pilot flies to a location, there are not signs to tell him where to go or roads to help avoid obstacles. A pilot must rely on an aeronautical chart for information to plan the route safely. Getting lost in an aircraft is not an option. Weather, darkness, fuel starvation can all result in a dangerous situation for a pilot not prepared with a specific route, destination and alternative destinations. Pilots often forgo this step in flight planning because either they feel confident in their knowledge of the area or belief they can just “wing it.” This lesson will introduce the aeronautical chart to the students as well as all the useful information that can be found on the chart while planning a flight or during a flight. OVERVIEW This packet includes several steps on how to plan a successful flight using an aeronautical chart. Many pilots ignore this portion of flight preperation, especially when flying through familiar airspace to familiar airports. Proper flight planning is not only a smart safety precaution, but FAR 91.103 states that “Each pilot in command shall, before beginning a flight, become familiar with all available information concerning that flight.” (Code of Federal Regulations, Title 14: Aeronautics and Space). Aviation charts present a large amount of useful information in a small area. Aeronautic charts are portable and required during a flight. -

Quality Assurance of Lidar Systems – Mission Planning
QUALITY ASSURANCE OF LIDAR SYSTEMS – MISSION PLANNING Kutalmis Saylam GeoBC Crown Registry and Geographic Base (CRGB) Branch 1st Floor, 3400 Davidson Ave, Victoria, BC V8Z 3P8 Canada [email protected] ABSTRACT Mission planning is considered a crucial aspect of Airborne Light detection and Ranging (LiDAR) surveys to contribute to total Quality Assurance (QA) experience. Since LiDAR is a relatively new spatial data acquisition practice, one may not find complete documentation on how to get prepared for such a mission. There is abstract information available from a few public and private organizations; however, none of these resources provide fully documented and thorough explanation. Throughout the industry, most airborne LiDAR missions are prepared with the previous expertise of the personnel who have involved in earlier projects. Formal training is not common, and ‘learning-on-the-job’ has potential complications for the future. Additionally, there are various types of airborne LiDAR surveys that require specific know-how, but expertise carried over may not work for a different type of survey. Field and office managers are advised to assess the project requirements and available resources very carefully prior to mission initiates. There are fundamental requirements, as well as less important actions. Due to the variable nature of airborne surveys, all phases need steady observation to prevent potentially costly changes or mission failures. Various projects experience difficulties in order to complete projects sooner, resulting in overlooked and skipped QA procedures. Careful assessment of the requirements and planning with adequate timing is vital for a successful mission completion. A good mission planning requires careful and extensive consideration of various phases of the project. -

Enr 1.10 Flight Planning
AIP MALAYSIA ENR 1.10 - 1 ENR 1.10 FLIGHT PLANNING 1. PROCEDURES FOR THE SUBMISSION OF A FLIGHT PLAN 1.1 A flight plan shall be submitted prior to operating: a)any flight or portion thereof to be provided with air traffic control service; b)any IFR flight within advisory airspace; c)any flight within or into designated areas, or along designated routes, when so required by the appropriate ATS authority to facilitate the provision of flight information, alerting and search and rescue services; d)any flight within or into designated areas, or along designated routes, when so required by the appropriate ATS authority to facilitate co-ordination with appropriate military units or with air traffic services units in adjacent States in order to avoid the possible need for interception for the purpose of identification; e)any flight across international borders. Note. The term "flight plan" is used to mean variously,full information on all items comprised in the flight plan description, covering the whole route of a flight, or limited information required when the purpose is to obtain a clearance for a minor portion of a flight such as to cross an airway, to take off from, or to land at a controlled aerodrome. 1.2 The pilot-in-command or the operator shall use the ICAO Flight Plan Form. 1.3 The flight plan shall be submitted by the operator or pilot-in-command to the nearest ATC unit. a)At least 60 minutes prior to ETD for the following : i) Flights departing Malaysian airports whose destinations are outside Malaysia.