Fundamentals of Flight
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Notes on Earth Atmospheric Entry for Mars Sample Return Missions
NASA/TP–2006-213486 Notes on Earth Atmospheric Entry for Mars Sample Return Missions Thomas Rivell Ames Research Center, Moffett Field, California September 2006 The NASA STI Program Office . in Profile Since its founding, NASA has been dedicated to the • CONFERENCE PUBLICATION. Collected advancement of aeronautics and space science. The papers from scientific and technical confer- NASA Scientific and Technical Information (STI) ences, symposia, seminars, or other meetings Program Office plays a key part in helping NASA sponsored or cosponsored by NASA. maintain this important role. • SPECIAL PUBLICATION. Scientific, technical, The NASA STI Program Office is operated by or historical information from NASA programs, Langley Research Center, the Lead Center for projects, and missions, often concerned with NASA’s scientific and technical information. The subjects having substantial public interest. NASA STI Program Office provides access to the NASA STI Database, the largest collection of • TECHNICAL TRANSLATION. English- aeronautical and space science STI in the world. language translations of foreign scientific and The Program Office is also NASA’s institutional technical material pertinent to NASA’s mission. mechanism for disseminating the results of its research and development activities. These results Specialized services that complement the STI are published by NASA in the NASA STI Report Program Office’s diverse offerings include creating Series, which includes the following report types: custom thesauri, building customized databases, organizing and publishing research results . even • TECHNICAL PUBLICATION. Reports of providing videos. completed research or a major significant phase of research that present the results of NASA For more information about the NASA STI programs and include extensive data or theoreti- Program Office, see the following: cal analysis. -
Weather and Aviation: How Does Weather Affect the Safety and Operations of Airports and Aviation, and How Does FAA Work to Manage Weather-Related Effects?
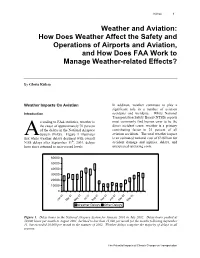
Kulesa 1 Weather and Aviation: How Does Weather Affect the Safety and Operations of Airports and Aviation, and How Does FAA Work to Manage Weather-related Effects? By Gloria Kulesa Weather Impacts On Aviation In addition, weather continues to play a significant role in a number of aviation Introduction accidents and incidents. While National Transportation Safety Board (NTSB) reports ccording to FAA statistics, weather is most commonly find human error to be the the cause of approximately 70 percent direct accident cause, weather is a primary of the delays in the National Airspace contributing factor in 23 percent of all System (NAS). Figure 1 illustrates aviation accidents. The total weather impact that while weather delays declined with overall is an estimated national cost of $3 billion for NAS delays after September 11th, 2001, delays accident damage and injuries, delays, and have since returned to near-record levels. unexpected operating costs. 60000 50000 40000 30000 20000 10000 0 1 01 01 0 01 02 02 ul an 01 J ep an 02 J Mar May S Nov 01 J Mar May Weather Delays Other Delays Figure 1. Delay hours in the National Airspace System for January 2001 to July 2002. Delay hours peaked at 50,000 hours per month in August 2001, declined to less than 15,000 per month for the months following September 11, but exceeded 30,000 per month in the summer of 2002. Weather delays comprise the majority of delays in all seasons. The Potential Impacts of Climate Change on Transportation 2 Weather and Aviation: How Does Weather Affect the Safety and Operations of Airports and Aviation, and How Does FAA Work to Manage Weather-related Effects? Thunderstorms and Other Convective In-Flight Icing. -

People's Liberation Army Air Force Aviation Training at the Operational
C O R P O R A T I O N From Theory to Practice People’s Liberation Army Air Force Aviation Training at the Operational Unit Lyle J. Morris, Eric Heginbotham For more information on this publication, visit www.rand.org/t/RR1415 Library of Congress Cataloging-in-Publication Data is available for this publication. ISBN: 978-0-8330-9497-1 Published by the RAND Corporation, Santa Monica, Calif. © Copyright 2016 RAND Corporation R® is a registered trademark. Limited Print and Electronic Distribution Rights This document and trademark(s) contained herein are protected by law. This representation of RAND intellectual property is provided for noncommercial use only. Unauthorized posting of this publication online is prohibited. Permission is given to duplicate this document for personal use only, as long as it is unaltered and complete. Permission is required from RAND to reproduce, or reuse in another form, any of its research documents for commercial use. For information on reprint and linking permissions, please visit www.rand.org/pubs/permissions. The RAND Corporation is a research organization that develops solutions to public policy challenges to help make communities throughout the world safer and more secure, healthier and more prosperous. RAND is nonprofit, nonpartisan, and committed to the public interest. RAND’s publications do not necessarily reflect the opinions of its research clients and sponsors. Support RAND Make a tax-deductible charitable contribution at www.rand.org/giving/contribute www.rand.org Preface About the China Aerospace Studies Institute The China Aerospace Studies Institute (CASI) was created in 2014 at the initiative of the Headquarters, U.S. -

8. Level, Non-Accelerated Flight
Performance 8. Level, Non-Accelerated Flight For non-accelerated flight, the tangential acceleration, , and normal acceleration, . As a result, the governing equations become: (1) If we add the additional assumptions of level flight, , and that the thrust is aligned with the velocity vector, , then Eq. (1) reduces to the simple form: (2) The last two equations tell us that the altitude is a constant, and the velocity is the range rate. For now, however, we are interested in the first two equations that can be rewritten as: (3) The key thing to remember about these equations is that the weight,W,isagivenand it is equal to the Lift. Consequently, lift is not at our disposal, it must equal the given weight! Thus for a given aircraft and any given altitude, we can determine the required lift coefficient (and hence angle-of-attack) for any given airspeed. (4) Therefore at a given weight and altitude, the lift coefficient varies as 1 over V2. A sketch of lift coefficient vs. speed looks as follows: 1 It is clear from the figure that as the vehicle slows down, in order to remain in level flight, the lift coefficient (and hence angle-of-attack) must increase. [You can think of it in terms of the momentum flux. The momentum flux (the mass flow rate time the velocity out in the z direction) creates the lift force. Since the mass flow rate is directional proportional to the velocity, then the slower we go, the more the air must be deflected downward. We do this by increasing the angle-of-attack!]. -
Aerodynamic Characteristics of Naca 0012 Airfoil Section at Different Angles of Attack
AERODYNAMIC CHARACTERISTICS OF NACA 0012 AIRFOIL SECTION AT DIFFERENT ANGLES OF ATTACK SUPREETH NARASIMHAMURTHY GRADUATE STUDENT 1327291 Table of Contents 1) Introduction………………………………………………………………………………………………………………………………………...1 2) Methodology……………………………………………………………………………………………………………………………………….3 3) Results……………………………………………………………………………………………………………………………………………......5 4) Conclusion …………………………………………………………………………………………………………………………………………..9 5) References…………………………………………………………………………………………………………………………………………10 List of Figures Figure 1: Basic nomenclature of an airfoil………………………………………………………………………………………………...1 Figure 2: Computational domain………………………………………………………………………………………………………………4 Figure 3: Static Pressure Contours for different angles of attack……………………………………………………………..5 Figure 4: Velocity Magnitude Contours for different angles of attack………………………………………………………………………7 Fig 5: Variation of Cl and Cd with alpha……………………………………………………………………………………………………8 Figure 6: Lift Coefficient and Drag Coefficient Ratio for Re = 50000…………………………………………………………8 List of Tables Table 1: Lift and Drag coefficients as calculated from lift and drag forces from formulae given above……7 Introduction It is a fact of common experience that a body in motion through a fluid experience a resultant force which, in most cases is mainly a resistance to the motion. A class of body exists, However for which the component of the resultant force normal to the direction to the motion is many time greater than the component resisting the motion, and the possibility of the flight of an airplane depends on the use of the body of this class for wing structure. Airfoil is such an aerodynamic shape that when it moves through air, the air is split and passes above and below the wing. The wing’s upper surface is shaped so the air rushing over the top speeds up and stretches out. This decreases the air pressure above the wing. The air flowing below the wing moves in a comparatively straighter line, so its speed and air pressure remain the same. -

Water Rocket Booklet
A guide to building and understanding the physics of Water Rockets Version 1.02 June 2007 Warning: Water Rocketeering is a potentially dangerous activity and individuals following the instructions herein do so at their own risk. Exclusion of liability: NPL Management Limited cannot exclude the risk of accident and, for this reason, hereby exclude, to the maximum extent permissible by law, any and all liability for loss, damage, or harm, howsoever arising. Contents WATER ROCKETS SECTION 1: WHAT IS A WATER ROCKET? 1 SECTION 3: LAUNCHERS 9 SECTION 4: OPTIMISING ROCKET DESIGN 15 SECTION 5: TESTING YOUR ROCKET 24 SECTION 6: PHYSICS OF A WATER ROCKET 29 SECTION 7: COMPUTER SIMULATION 32 SECTION 8: SAFETY 37 SECTION 9: USEFUL INFORMATION 38 SECTION 10: SOME INTERESTING DETAILS 40 Copyright and Reproduction Michael de Podesta hereby asserts his right to be identified as author of this booklet. The copyright of this booklet is owned by NPL. Michael de Podesta and NPL grant permission to reproduce the booklet in part or in whole for any not-for-profit educational activity, but you must acknowledge both the author and the copyright owner. Acknowledgements I began writing this guide to support people entering the NPL Water Rocket Competition. So the first acknowledgement has to be to Dr. Nick McCormick, who founded the competition many years ago and who is still the driving force behind the activity at NPL. Nick’s instinct for physics and fun has brought pleasure to thousands. The inspiration to actually begin writing this document instead of just saying that someone ought to do it, was provided by Andrew Hanson. -

Fly-By-Wire - Wikipedia, the Free Encyclopedia 11-8-20 下午5:33 Fly-By-Wire from Wikipedia, the Free Encyclopedia
Fly-by-wire - Wikipedia, the free encyclopedia 11-8-20 下午5:33 Fly-by-wire From Wikipedia, the free encyclopedia Fly-by-wire (FBW) is a system that replaces the Fly-by-wire conventional manual flight controls of an aircraft with an electronic interface. The movements of flight controls are converted to electronic signals transmitted by wires (hence the fly-by-wire term), and flight control computers determine how to move the actuators at each control surface to provide the ordered response. The fly-by-wire system also allows automatic signals sent by the aircraft's computers to perform functions without the pilot's input, as in systems that automatically help stabilize the aircraft.[1] Contents Green colored flight control wiring of a test aircraft 1 Development 1.1 Basic operation 1.1.1 Command 1.1.2 Automatic Stability Systems 1.2 Safety and redundancy 1.3 Weight saving 1.4 History 2 Analog systems 3 Digital systems 3.1 Applications 3.2 Legislation 3.3 Redundancy 3.4 Airbus/Boeing 4 Engine digital control 5 Further developments 5.1 Fly-by-optics 5.2 Power-by-wire 5.3 Fly-by-wireless 5.4 Intelligent Flight Control System 6 See also 7 References 8 External links Development http://en.wikipedia.org/wiki/Fly-by-wire Page 1 of 9 Fly-by-wire - Wikipedia, the free encyclopedia 11-8-20 下午5:33 Mechanical and hydro-mechanical flight control systems are relatively heavy and require careful routing of flight control cables through the aircraft by systems of pulleys, cranks, tension cables and hydraulic pipes. -
Introduction to Aerodynamics < 1.7. Dimensional Analysis > Physical
Introduction to Aerodynamics < 1.7. Dimensional analysis > Physical parameters Q: What physical quantities influence forces and moments? V A l Aerodynamics 2015 fall - 1 - Introduction to Aerodynamics < 1.7. Dimensional analysis > Physical parameters Physical quantities to be considered Parameter Symbol units Lift L' MLT-2 Angle of attack α - -1 Freestream velocity V∞ LT -3 Freestream density ρ∞ ML -1 -1 Freestream viscosity μ∞ ML T -1 Freestream speed of sound a∞ LT Size of body (e.g. chord) c L Generally, resultant aerodynamic force: R = f(ρ∞, V∞, c, μ∞, a∞) (1) Aerodynamics 2015 fall - 2 - Introduction to Aerodynamics < 1.7. Dimensional analysis > The Buckingham PI Theorem The relation with N physical variables f1 ( p1 , p2 , p3 , … , pN ) = 0 can be expressed as f 2( P1 , P2 , ... , PN-K ) = 0 where K is the No. of fundamental dimensions Then P1 =f3 ( p1 , p2 , … , pK , pK+1 ) P2 =f4 ( p1 , p2 , … , pK , pK+2 ) …. PN-K =f ( p1 , p2 , … , pK , pN ) Aerodynamics 2015 fall - 3 - < 1.7. Dimensional analysis > The Buckingham PI Theorem Example) Aerodynamics 2015 fall - 4 - < 1.7. Dimensional analysis > The Buckingham PI Theorem Example) Aerodynamics 2015 fall - 5 - < 1.7. Dimensional analysis > The Buckingham PI Theorem Aerodynamics 2015 fall - 6 - < 1.7. Dimensional analysis > The Buckingham PI Theorem Through similar procedure Aerodynamics 2015 fall - 7 - Introduction to Aerodynamics < 1.7. Dimensional analysis > Dimensionless form Aerodynamics 2015 fall - 8 - Introduction to Aerodynamics < 1.8. Flow similarity > Dynamic similarity Two different flows are dynamically similar if • Streamline patterns are similar • Velocity, pressure, temperature distributions are same • Force coefficients are same Criteria • Geometrically similar • Similarity parameters (Re, M) are same Aerodynamics 2015 fall - 9 - Introduction to Aerodynamics < 1.8. -

Aerodyn Theory Manual
January 2005 • NREL/TP-500-36881 AeroDyn Theory Manual P.J. Moriarty National Renewable Energy Laboratory Golden, Colorado A.C. Hansen Windward Engineering Salt Lake City, Utah National Renewable Energy Laboratory 1617 Cole Boulevard, Golden, Colorado 80401-3393 303-275-3000 • www.nrel.gov Operated for the U.S. Department of Energy Office of Energy Efficiency and Renewable Energy by Midwest Research Institute • Battelle Contract No. DE-AC36-99-GO10337 January 2005 • NREL/TP-500-36881 AeroDyn Theory Manual P.J. Moriarty National Renewable Energy Laboratory Golden, Colorado A.C. Hansen Windward Engineering Salt Lake City, Utah Prepared under Task No. WER4.3101 and WER5.3101 National Renewable Energy Laboratory 1617 Cole Boulevard, Golden, Colorado 80401-3393 303-275-3000 • www.nrel.gov Operated for the U.S. Department of Energy Office of Energy Efficiency and Renewable Energy by Midwest Research Institute • Battelle Contract No. DE-AC36-99-GO10337 NOTICE This report was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States government or any agency thereof. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States government or any agency thereof. -

Birds Change the Shape of Their Wings in Flight. Now, Aircraft Designers Have Come up with the Mission Adaptive Wing to Give Aircraft Some of the Same Advantages
Birds change the shape of their wings in flight. Now, aircraft designers have come up with the Mission Adaptive Wing to give aircraft some of the same advantages. Pilot Report: AFTI F-111 BY MAJ. SCOTT E. PARKS, USAF IRDS are beautiful and efficient Prior to the jet age, optimizing The Mission Adaptive flying machines. I have often wing shape was not a concern be- Wing, a radically new B concept, enables an observed hawks flying high above cause of limitations in aircraft al- aircraft to change the desert at Edwards AFB, Calif., titudes and airspeeds. Later expan- wing shape continu- effortlessly positioning their wings sion of the flight envelope, with the ously and smoothly to the optimum shape dictated by advent of jet-powered supersonic while in flight for greatly improved instinct and learned through experi- fighters and bombers, forced de- agility and perfor- ence. They soar smoothly in the signers to recognize the critical mance. Shown at summer afternoon thermals with need for a variable shape wing. right is the Advanced wings comfortably forward, only to High-performance aircraft need a Fighter Technology dive suddenly for an unsuspecting wing that is efficient at high sub- Integration (AFTI) test craft, a special F-111 target at high speed with wings sonic and supersonic speeds and fitted with the devel- swept back. Landings, on the other that at the same time can minimize opmental wing. hand, require the hawk's wing to be approach speeds for landing. Flaps forward and highly curved, or cam- are one answer to this dilemma. -
6.2 Understanding Flight
6.2 - Understanding Flight Grade 6 Activity Plan Reviews and Updates 6.2 Understanding Flight Objectives: 1. To understand Bernoulli’s Principle 2. To explain drag and how different shapes influence it 3. To describe how the results of similar and repeated investigations testing drag may vary and suggest possible explanations for variations. 4. To demonstrate methods for altering drag in flying devices. Keywords/concepts: Bernoulli’s Principle, pressure, lift, drag, angle of attack, average, resistance, aerodynamics Curriculum outcomes: 107-9, 204-7, 205-5, 206-6, 301-17, 301-18, 303-32, 303-33. Take-home product: Paper airplane, hoop glider Segment Details African Proverb and Cultural “The bird flies, but always returns to Earth.” Gambia Relevance (5min.) Have any of you ever been on an airplane? Have you ever wondered how such a heavy aircraft can fly? Introduce Bernoulli’s Principle and drag. Pre-test Show this video on Bernoulli’s Principle: (10 min.) https://www.youtube.com/watch?v=bv3m57u6ViE Note: To gain the speed so lift can be created the plane has to overcome the force of drag; they also have to overcome this force constantly in flight. Therefore, planes have been designed to reduce drag Demo 1 Use the students to demonstrate the basic properties of (10 min.) Bernoulli’s Principle. Activity 2 Students use paper airplanes to alter drag and hypothesize why (30 min.) different planes performed differently Activity 3 Students make a hoop glider to understand the effects of drag (20 min.) on different shaped objects. Post-test Word scramble. (5 min.) https://www.amazon.com/PowerUp-Smartphone-Controlled- Additional idea Paper-Airplane/dp/B00N8GWZ4M Suggested Interpretation of Proverb What comes up must come down Background Information Bernoulli’s Principle Daniel Bernoulli, an eighteenth-century Swiss scientist, discovered that as the velocity of a fluid increases, its pressure decreases. -

Helicopter Safety July-August 1991
F L I G H T S A F E T Y F O U N D A T I O N HELICOPTER SAFETY Vol. 17 No. 4 For Everyone Concerned with the Safety of Flight July/August 1991 The Philosophy and Realities of Autorotations Like the power-off glide in a fixed-wing aircraft, the autorotation in a helicopter must be used properly if it is to be a successful safety maneuver. by Michael K. Hynes Aviation Consultant In all helicopter flying, there is no single event that has a In the early years of airplane flight, the fear of engine greater impact on safety than the autorotation maneuver. failure, or that the airplane might have structural prob- The mere mention of the word “autorotation” at any lems during flight, was very strong. If either of these gathering of helicopter pilots, especially flight instruc- events took place, the pilot’s ability to get the airplane tors, will guarantee a long and lively discussion. safely on the ground quickly was important. The time it took to get the airplane on the ground was directly in There are many misconceptions about autorotations and proportion to the altitude at which the airplane was being they contribute to the accident rate when an autorotation flown. It is therefore logical that all early flights were precedes a helicopter landing accident. One approach to flown at low altitudes, often at less than 500 feet above a discussion of autorotations is to look at the subject the ground (agl). from three views: first, the philosophy of the subject; second, the reality of the circumstances that require au- At these low altitudes, the pilot did not always have the torotations; and third, the execution of the maneuver.