My Search for Symmetrical Embeddings of Regular Maps
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Final Poster
Associating Finite Groups with Dessins d’Enfants Luis Baeza, Edwin Baeza, Conner Lawrence, and Chenkai Wang Abstract Platonic Solids Rotation Group Dn: Regular Convex Polygon Approach Each finite, connected planar graph has an automorphism group G;such Following Magot and Zvonkin, reduce to easier cases using “hypermaps” permutations can be extended to automorphisms of the Riemann sphere φ : P1(C) P1(C), then composing β = φ f where S 2(R) P1(C). In 1984, Alexander Grothendieck, inspired by a result of f : 1( ) ! 1( )isaBely˘ımapasafunctionofeither◦ zn or ' P C P C Gennadi˘ıBely˘ıfrom 1979, constructed a finite, connected planar graph 4 zn/(zn +1)! 2 such that Aut(f ) Z or Aut(f ) D ,respectively. ' n ' n ∆β via certain rational functions β(z)=p(z)/q(z)bylookingatthe inverse image of the interval from 0 to 1. The automorphisms of such a Hypermaps: Rotation Group Zn graph can be identified with the Galois group Aut(β)oftheassociated 1 1 rational function β : P (C) P (C). In this project, we investigate how Rigid Rotations of the Platonic Solids I Wheel/Pyramids (J1, J2) ! w 3 (w +8) restrictive Grothendieck’s concept of a Dessin d’Enfant is in generating all n 2 I φ(w)= 1 1 z +1 64 (w 1) automorphisms of planar graphs. We discuss the rigid rotations of the We have an action : PSL2(C) P (C) P (C). β(z)= : v = n + n, e =2 n, f =2 − n ◦ ⇥ 2 !n 2 4 zn · Platonic solids (the tetrahedron, cube, octahedron, icosahedron, and I Zn = r r =1 and Dn = r, s s = r =(sr) =1 are the rigid I Cupola (J3, J4, J5) dodecahedron), the Archimedean solids, the Catalan solids, and the rotations of the regular convex polygons,with 4w 4(w 2 20w +105)3 I φ(w)= − ⌦ ↵ ⌦ 1 ↵ Rotation Group A4: Tetrahedron 3 2 Johnson solids via explicit Bely˘ımaps. -

Platonic and Archimedean Geometries in Multicomponent Elastic Membranes
Platonic and Archimedean geometries in multicomponent elastic membranes Graziano Vernizzia,1, Rastko Sknepneka, and Monica Olvera de la Cruza,b,c,2 aDepartment of Materials Science and Engineering, Northwestern University, Evanston, IL 60208; bDepartment of Chemical and Biological Engineering, Northwestern University, Evanston, IL 60208; and cDepartment of Chemistry, Northwestern University, Evanston, IL 60208 Edited by L. Mahadevan, Harvard University, Cambridge, MA, and accepted by the Editorial Board February 8, 2011 (received for review August 30, 2010) Large crystalline molecular shells, such as some viruses and fuller- possible to construct a lattice on the surface of a sphere such enes, buckle spontaneously into icosahedra. Meanwhile multi- that each site has only six neighbors. Consequently, any such crys- component microscopic shells buckle into various polyhedra, as talline lattice will contain defects. If one allows for fivefold observed in many organelles. Although elastic theory explains defects only then, according to the Euler theorem, the minimum one-component icosahedral faceting, the possibility of buckling number of defects is 12 fivefold disclinations. In the absence of into other polyhedra has not been explored. We show here that further defects (21), these 12 disclinations are positioned on the irregular and regular polyhedra, including some Archimedean and vertices of an inscribed icosahedron (22). Because of the presence Platonic polyhedra, arise spontaneously in elastic shells formed of disclinations, the ground state of the shell has a finite strain by more than one component. By formulating a generalized elastic that grows with the shell size. When γ > γà (γà ∼ 154) any flat model for inhomogeneous shells, we demonstrate that coas- fivefold disclination buckles into a conical shape (19). -
Unit 6 Visualising Solid Shapes(Final)
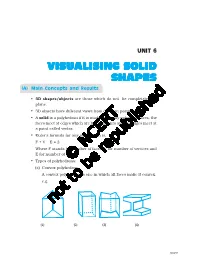
• 3D shapes/objects are those which do not lie completely in a plane. • 3D objects have different views from different positions. • A solid is a polyhedron if it is made up of only polygonal faces, the faces meet at edges which are line segments and the edges meet at a point called vertex. • Euler’s formula for any polyhedron is, F + V – E = 2 Where F stands for number of faces, V for number of vertices and E for number of edges. • Types of polyhedrons: (a) Convex polyhedron A convex polyhedron is one in which all faces make it convex. e.g. (1) (2) (3) (4) 12/04/18 (1) and (2) are convex polyhedrons whereas (3) and (4) are non convex polyhedron. (b) Regular polyhedra or platonic solids: A polyhedron is regular if its faces are congruent regular polygons and the same number of faces meet at each vertex. For example, a cube is a platonic solid because all six of its faces are congruent squares. There are five such solids– tetrahedron, cube, octahedron, dodecahedron and icosahedron. e.g. • A prism is a polyhedron whose bottom and top faces (known as bases) are congruent polygons and faces known as lateral faces are parallelograms (when the side faces are rectangles, the shape is known as right prism). • A pyramid is a polyhedron whose base is a polygon and lateral faces are triangles. • A map depicts the location of a particular object/place in relation to other objects/places. The front, top and side of a figure are shown. Use centimetre cubes to build the figure. -

The Truncated Icosahedron As an Inflatable Ball
https://doi.org/10.3311/PPar.12375 Creative Commons Attribution b |99 Periodica Polytechnica Architecture, 49(2), pp. 99–108, 2018 The Truncated Icosahedron as an Inflatable Ball Tibor Tarnai1, András Lengyel1* 1 Department of Structural Mechanics, Faculty of Civil Engineering, Budapest University of Technology and Economics, H-1521 Budapest, P.O.B. 91, Hungary * Corresponding author, e-mail: [email protected] Received: 09 April 2018, Accepted: 20 June 2018, Published online: 29 October 2018 Abstract In the late 1930s, an inflatable truncated icosahedral beach-ball was made such that its hexagonal faces were coloured with five different colours. This ball was an unnoticed invention. It appeared more than twenty years earlier than the first truncated icosahedral soccer ball. In connection with the colouring of this beach-ball, the present paper investigates the following problem: How many colourings of the dodecahedron with five colours exist such that all vertices of each face are coloured differently? The paper shows that four ways of colouring exist and refers to other colouring problems, pointing out a defect in the colouring of the original beach-ball. Keywords polyhedron, truncated icosahedron, compound of five tetrahedra, colouring of polyhedra, permutation, inflatable ball 1 Introduction Spherical forms play an important role in different fields – not even among the relics of the Romans who inherited of science and technology, and in different areas of every- many ball games from the Greeks. day life. For example, spherical domes are quite com- The Romans mainly used balls composed of equal mon in architecture, and spherical balls are used in most digonal panels, forming a regular hosohedron (Coxeter, 1973, ball games. -
![Arxiv:1403.3190V4 [Gr-Qc] 18 Jun 2014 ‡ † ∗ Stefloig H Oetintr Ftehmloincon Hamiltonian the of [16]](https://docslib.b-cdn.net/cover/6577/arxiv-1403-3190v4-gr-qc-18-jun-2014-stefloig-h-oetintr-ftehmloincon-hamiltonian-the-of-16-926577.webp)
Arxiv:1403.3190V4 [Gr-Qc] 18 Jun 2014 ‡ † ∗ Stefloig H Oetintr Ftehmloincon Hamiltonian the of [16]
A curvature operator for LQG E. Alesci,∗ M. Assanioussi,† and J. Lewandowski‡ Institute of Theoretical Physics, University of Warsaw (Instytut Fizyki Teoretycznej, Uniwersytet Warszawski), ul. Ho˙za 69, 00-681 Warszawa, Poland, EU We introduce a new operator in Loop Quantum Gravity - the 3D curvature operator - related to the 3-dimensional scalar curvature. The construction is based on Regge Calculus. We define this operator starting from the classical expression of the Regge curvature, we derive its properties and discuss some explicit checks of the semi-classical limit. I. INTRODUCTION Loop Quantum Gravity [1] is a promising candidate to finally realize a quantum description of General Relativity. The theory presents two complementary descriptions based on the canon- ical and the covariant approach (spinfoams) [2]. The first implements the Dirac quantization procedure [3] for GR in Ashtekar-Barbero variables [4] formulated in terms of the so called holonomy-flux algebra [1]: one considers smooth manifolds and defines a system of paths and dual surfaces over which the connection and the electric field can be smeared. The quantiza- tion of the system leads to the full Hilbert space obtained as the projective limit of the Hilbert space defined on a single graph. The second is instead based on the Plebanski formulation [5] of GR, implemented starting from a simplicial decomposition of the manifold, i.e. restricting to piecewise linear flat geometries. Even if the starting point is different (smooth geometry in the first case, piecewise linear in the second) the two formulations share the same kinematics [6] namely the spin-network basis [7] first introduced by Penrose [8]. -

Convex Polytopes and Tilings with Few Flag Orbits
Convex Polytopes and Tilings with Few Flag Orbits by Nicholas Matteo B.A. in Mathematics, Miami University M.A. in Mathematics, Miami University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Abstract of Dissertation The amount of symmetry possessed by a convex polytope, or a tiling by convex polytopes, is reflected by the number of orbits of its flags under the action of the Euclidean isometries preserving the polytope. The convex polytopes with only one flag orbit have been classified since the work of Schläfli in the 19th century. In this dissertation, convex polytopes with up to three flag orbits are classified. Two-orbit convex polytopes exist only in two or three dimensions, and the only ones whose combinatorial automorphism group is also two-orbit are the cuboctahedron, the icosidodecahedron, the rhombic dodecahedron, and the rhombic triacontahedron. Two-orbit face-to-face tilings by convex polytopes exist on E1, E2, and E3; the only ones which are also combinatorially two-orbit are the trihexagonal plane tiling, the rhombille plane tiling, the tetrahedral-octahedral honeycomb, and the rhombic dodecahedral honeycomb. Moreover, any combinatorially two-orbit convex polytope or tiling is isomorphic to one on the above list. Three-orbit convex polytopes exist in two through eight dimensions. There are infinitely many in three dimensions, including prisms over regular polygons, truncated Platonic solids, and their dual bipyramids and Kleetopes. There are infinitely many in four dimensions, comprising the rectified regular 4-polytopes, the p; p-duoprisms, the bitruncated 4-simplex, the bitruncated 24-cell, and their duals. -
Step 1: 3D Shapes
Year 1 – Autumn Block 3 – Shape Step 1: 3D Shapes © Classroom Secrets Limited 2018 Introduction Match the shape to its correct name. A. B. C. D. E. cylinder square- cuboid cube sphere based pyramid © Classroom Secrets Limited 2018 Introduction Match the shape to its correct name. A. B. C. D. E. cube sphere square- cylinder cuboid based pyramid © Classroom Secrets Limited 2018 Varied Fluency 1 True or false? The shape below is a cone. © Classroom Secrets Limited 2018 Varied Fluency 1 True or false? The shape below is a cone. False, the shape is a triangular-based pyramid. © Classroom Secrets Limited 2018 Varied Fluency 2 Circle the correct name of the shape below. cylinder pyramid cuboid © Classroom Secrets Limited 2018 Varied Fluency 2 Circle the correct name of the shape below. cylinder pyramid cuboid © Classroom Secrets Limited 2018 Varied Fluency 3 Which shape is the odd one out? © Classroom Secrets Limited 2018 Varied Fluency 3 Which shape is the odd one out? The cuboid is the odd one out because the other shapes are cylinders. © Classroom Secrets Limited 2018 Varied Fluency 4 Follow the path of the cuboids to make it through the maze. Start © Classroom Secrets Limited 2018 Varied Fluency 4 Follow the path of the cuboids to make it through the maze. Start © Classroom Secrets Limited 2018 Reasoning 1 The shapes below are labelled. Spot the mistake. A. B. C. cone cuboid cube Explain your answer. © Classroom Secrets Limited 2018 Reasoning 1 The shapes below are labelled. Spot the mistake. A. B. C. cone cuboid cube Explain your answer. -

A Method for Predicting Multivariate Random Loads and a Discrete Approximation of the Multidimensional Design Load Envelope
International Forum on Aeroelasticity and Structural Dynamics IFASD 2017 25-28 June 2017 Como, Italy A METHOD FOR PREDICTING MULTIVARIATE RANDOM LOADS AND A DISCRETE APPROXIMATION OF THE MULTIDIMENSIONAL DESIGN LOAD ENVELOPE Carlo Aquilini1 and Daniele Parisse1 1Airbus Defence and Space GmbH Rechliner Str., 85077 Manching, Germany [email protected] Keywords: aeroelasticity, buffeting, combined random loads, multidimensional design load envelope, IFASD-2017 Abstract: Random loads are of greatest concern during the design phase of new aircraft. They can either result from a stationary Gaussian process, such as continuous turbulence, or from a random process, such as buffet. Buffet phenomena are especially relevant for fighters flying in the transonic regime at high angles of attack or when the turbulent, separated air flow induces fluctuating pressures on structures like wing surfaces, horizontal tail planes, vertical tail planes, airbrakes, flaps or landing gear doors. In this paper a method is presented for predicting n-dimensional combined loads in the presence of massively separated flows. This method can be used both early in the design process, when only numerical data are available, and later, when test data measurements have been performed. Moreover, the two-dimensional load envelope for combined load cases and its discretization, which are well documented in the literature, are generalized to n dimensions, n ≥ 3. 1 INTRODUCTION The main objectives of this paper are: 1. To derive a method for predicting multivariate loads (but also displacements, velocities and accelerations in terms of auto- and cross-power spectra, [1, pp. 319-320]) for aircraft, or parts of them, subjected to a random excitation. -

Optimization of Tensegrity Lattice with Truncated Octahedral Units
OptimizationM. Ohsaki, J. Y. of Zhang, tensegrity K. Kogiso lattice andwith J. truncated J. Rimoli octahedral units Proceedings of the IASS Annual Symposium 2019 – Structural Membranes 2019 Form and Force 7 – 10 October 2019, Barcelona, Spain C. Lázaro, K.-U. Bletzinger, E. Oñate (eds.) Optimization of tensegrity lattice with truncated octahedral units Makoto OHSAKI∗a, Jingyao ZHANGa, Kosuke KOGISOa, Julian J. RIMOLIc *aDepartment of Architecture and Architectural Engineering, Kyoto University Kyoto-Daigaku Katsura, Nishikyo, Kyoto 615-8540, Japan [email protected] b School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, GA 30332, USA Abstract An optimization method is presented for tensegrity lattices composed of eight truncated octahedral units. The stored strain energy under specified forced vertical displacement is maximized under constraint on the structural material volume. The nonlinear behavior of bars allowing buckling is modeled as a bi- linear elastic material. As a result of optimization, a flexible structure with degrading vertical stiffness is obtained to be applicable to an energy absorption device or a vertical isolation system. Keywords: tensegrity, optimization, strain energy, truncated octahedral unit 1. Introduction Tensegrity structures are a class of self-standing pin jointed structures consisting of thin bars (struts) and cables stiffened by applying prestresses to their members [1, 3]. Because the bars are not continuously connected, i.e., they are topologically isolated from each other, these structures are usually too flexible to be used as load-resisting components of structures in mechanical and civil engineering applications. However, by exploiting their flexibility, tensegrity structures can be utilized as devices for reducing impact forces, isolating dynamic forces, and absorbing energy, to name a few applications [5]. -

Flippable Tilings of Constant Curvature Surfaces
FLIPPABLE TILINGS OF CONSTANT CURVATURE SURFACES FRANÇOIS FILLASTRE AND JEAN-MARC SCHLENKER Abstract. We call “flippable tilings” of a constant curvature surface a tiling by “black” and “white” faces, so that each edge is adjacent to two black and two white faces (one of each on each side), the black face is forward on the right side and backward on the left side, and it is possible to “flip” the tiling by pushing all black faces forward on the left side and backward on the right side. Among those tilings we distinguish the “symmetric” ones, for which the metric on the surface does not change under the flip. We provide some existence statements, and explain how to parameterize the space of those tilings (with a fixed number of black faces) in different ways. For instance one can glue the white faces only, and obtain a metric with cone singularities which, in the hyperbolic and spherical case, uniquely determines a symmetric tiling. The proofs are based on the geometry of polyhedral surfaces in 3-dimensional spaces modeled either on the sphere or on the anti-de Sitter space. 1. Introduction We are interested here in tilings of a surface which have a striking property: there is a simple specified way to re-arrange the tiles so that a new tiling of a non-singular surface appears. So the objects under study are actually pairs of tilings of a surface, where one tiling is obtained from the other by a simple operation (called a “flip” here) and conversely. The definition is given below. -

Visualization of Regular Maps
Symmetric Tiling of Closed Surfaces: Visualization of Regular Maps Jarke J. van Wijk Dept. of Mathematics and Computer Science Technische Universiteit Eindhoven [email protected] Abstract The first puzzle is trivial: We get a cube, blown up to a sphere, which is an example of a regular map. A cube is 2×4×6 = 48-fold A regular map is a tiling of a closed surface into faces, bounded symmetric, since each triangle shown in Figure 1 can be mapped to by edges that join pairs of vertices, such that these elements exhibit another one by rotation and turning the surface inside-out. We re- a maximal symmetry. For genus 0 and 1 (spheres and tori) it is quire for all solutions that they have such a 2pF -fold symmetry. well known how to generate and present regular maps, the Platonic Puzzle 2 to 4 are not difficult, and lead to other examples: a dodec- solids are a familiar example. We present a method for the gener- ahedron; a beach ball, also known as a hosohedron [Coxeter 1989]; ation of space models of regular maps for genus 2 and higher. The and a torus, obtained by making a 6 × 6 checkerboard, followed by method is based on a generalization of the method for tori. Shapes matching opposite sides. The next puzzles are more challenging. with the proper genus are derived from regular maps by tubifica- tion: edges are replaced by tubes. Tessellations are produced us- ing group theory and hyperbolic geometry. The main results are a generic procedure to produce such tilings, and a collection of in- triguing shapes and images. -

19. Three-Dimensional Figures
19. Three-Dimensional Figures Exercise 19A 1. Question Write down the number of faces of each of the following figures: A. Cuboid B. Cube C. Triangular prism D. Square pyramid E. Tetrahedron Answer A. 6 Face is also known as sides. A Cuboid has six faces. Book, Matchbox, Brick etc. are examples of Cuboid. B.6 A Cube has six faces and all faces are equal in length. Sugar Cubes, Dice etc. are examples of Cube. C. 5 A Triangular prism has two triangular faces and three rectangular faces. D. 5 A Square pyramid has one square face as a base and four triangular faces as the sides. So, Square pyramid has total five faces. E. 4 A Tetrahedron (Triangular Pyramid) has one triangular face as a base and three triangular faces as the sides. So, Tetrahedron has total four faces. 2. Question Write down the number of edges of each of the following figures: A. Tetrahedron B. Rectangular pyramid C. Cube D. Triangular prism Answer A. 6 A Tetrahedron has six edges. OA, OB, OC, AB, AC, BC are the 6 edges. B. 8 A Rectangular Pyramid has eight edges. AB, BC, CD, DA, OA, OB, DC, OD are the 8 edges. C. 12 A Cube has twelve edges. AB, BC, CD, DA, EF, FG, GH, HE, AE, DH, BF, CG are the edges. D. 9 A Triangular prism has nine edges. AB, BC, CA, DE, EF, FD, AD, BE, CF are the9 edges. 3. Question Write down the number of vertices of each of the following figures: A.