Unsupervised Mechanisms for Optimizing On-Time Performance Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

United-2016-2021.Pdf
27010_Contract_JCBA-FA_v10-cover.pdf 1 4/5/17 7:41 AM 2016 – 2021 Flight Attendant Agreement Association of Flight Attendants – CWA 27010_Contract_JCBA-FA_v10-cover.indd170326_L01_CRV.indd 1 1 3/31/174/5/17 7:533:59 AMPM TABLE OF CONTENTS Section 1 Recognition, Successorship and Mergers . 1 Section 2 Definitions . 4 Section 3 General . 10 Section 4 Compensation . 28 Section 5 Expenses, Transportation and Lodging . 36 Section 6 Minimum Pay and Credit, Hours of Service, and Contractual Legalities . 42 Section 7 Scheduling . 56 Section 8 Reserve Scheduling Procedures . 88 Section 9 Special Qualification Flight Attendants . 107 Section 10 AMC Operation . .116 Section 11 Training & General Meetings . 120 Section 12 Vacations . 125 Section 13 Sick Leave . 136 Section 14 Seniority . 143 Section 15 Leaves of Absence . 146 Section 16 Job Share and Partnership Flying Programs . 158 Section 17 Filling of Vacancies . 164 Section 18 Reduction in Personnel . .171 Section 19 Safety, Health and Security . .176 Section 20 Medical Examinations . 180 Section 21 Alcohol and Drug Testing . 183 Section 22 Personnel Files . 190 Section 23 Investigations & Grievances . 193 Section 24 System Board of Adjustment . 206 Section 25 Uniforms . 211 Section 26 Moving Expenses . 215 Section 27 Missing, Interned, Hostage or Prisoner of War . 217 Section 28 Commuter Program . 219 Section 29 Benefits . 223 Section 30 Union Activities . 265 Section 31 Union Security and Check-Off . 273 Section 32 Duration . 278 i LETTERS OF AGREEMENT LOA 1 20 Year Passes . 280 LOA 2 767 Crew Rest . 283 LOA 3 787 – 777 Aircraft Exchange . 285 LOA 4 AFA PAC Letter . 287 LOA 5 AFA Staff Travel . -

Volume I Restoration of Historic Streetcar Service
VOLUME I ENVIRONMENTAL ASSESSMENT RESTORATION OF HISTORIC STREETCAR SERVICE IN DOWNTOWN LOS ANGELES J U LY 2 0 1 8 City of Los Angeles Department of Public Works, Bureau of Engineering Table of Contents Contents EXECUTIVE SUMMARY ............................................................................................................................................. ES-1 ES.1 Introduction ........................................................................................................................................................... ES-1 ES.2 Purpose and Need ............................................................................................................................................... ES-1 ES.3 Background ............................................................................................................................................................ ES-2 ES.4 7th Street Alignment Alternative ................................................................................................................... ES-3 ES.5 Safety ........................................................................................................................................................................ ES-7 ES.6 Construction .......................................................................................................................................................... ES-7 ES.7 Operations and Ridership ............................................................................................................................... -

Circulator Bus Transit Cost
Transit CIRCULATOR BUS TRANSIT COST DowntownDC, www.downtowndc.org TI SORT STATE ON REGI AL IPACT LOCAL RID OR OR C SPOT WO URDLS CITPRIAT FUNDIN TRANSIT ANCY More Information: tti.tamu.edu/policy/how-to-fix-congestion SUCCESS STORIES Description How Will This Help? Washington, D.C. Circulator bus transit is a short-distance, • Improves mobility and The DC Circulator is a circular, fixed-route transit mode that circulation in target areas. cooperative effort of the District takes riders around a specific area with • Fosters the redevelopment of Columbia Department of major destinations. It may include street- of urban spaces into walk- Transportation, the Washington cars, rubber-tire trolleys, electric buses, able, mixed-use, high-density Metropolitan Area Transit or compressed natural gas buses. environments. Authority, DC Surface Transit, and First Transit. The DC Two common types of circulator bus • Improves parking availability in transit are downtown circulators and areas with shortages. Circulator began service in neighborhood circulators. A circulator • Reduces environmental 2005 and has bus system targeted at tourists/visitors impacts from private/individual experienced is more likely to use vehicle colors to be transportation. increasing clearly identifiable. ridership each Implementation Issues year. Target Market There are many barriers, constraints, and Most downtown circulators are orient- obstacles to successfully implement, ed toward employee and tourist/visi- Philadelphia, Pennsylvania operate, and maintain a circulator bus. tor markets. Neighborhood circulators The Independence Visitor However, funding is the major constraint meet the mobility needs of transit-reliant Center Corporation manages in most programs. Inadequate funding populations, such as low-income and the downtown circulator, and costs were the most common mobility-challenged people. -

Bus Schedules and Routes
City of Simi Valley Transit City of Simi Valley Transit provides a convenient We’ve Got Connections! and inexpensive way to travel in and around City of Simi Valley Transit is pleased to provide the City. Modern air-conditioned buses transport connections with other major transit systems: you in comfort to most major points of interest: ADA/Dial-A-Ride. 805-583-6464 shopping, schools, parks, public buildings and more! Amtrak Info: . 800-872-7245 LA Metro Information: ......323-466-3876 To fully enjoy the benefits of using the Metrolink: . 800-371-5465 buses, please remember: Moorpark City Transit: . .805-517-6315 • Food an beverages are not allowed on the TDD Information ...........800-735-2929 buses. Thousand Oaks Transit ......805-375-5467 • Please extinguish all smoking materials before VCTC:. 800-438-1112 boarding a bus. Free transfers are available upon request to L A • Radios, tape recorders, and electronic devices Metro and VCTC. must be turned off when boarding a bus. Headphones are allowed. All buses are wheelchair accessible. It is recommended that passengers call prior to • Drivers cannot make change. Please be starting a trip to confirm the closest bus stop prepared to pay the EXACT FARE. location. All buses are equipped with bike racks. • For Lost & Found items, call City of Simi Valley Transit at (805) 583-6456. Items may Fares be retrieved from the Simi Valley Police Full Fare Department Monday through Friday, 8:00 a.m. Single Trip. $1.50 to 4:00 p.m. Unlimited Day Pass . $5.00 • Bus Stops are located approximately ¼ to ½ 21-Ride Pass .....................$25.00 mile apart along routes within Simi Valley. -

The Influence of Passenger Load, Driving Cycle, Fuel Price and Different
Transportation https://doi.org/10.1007/s11116-018-9925-0 The infuence of passenger load, driving cycle, fuel price and diferent types of buses on the cost of transport service in the BRT system in Curitiba, Brazil Dennis Dreier1 · Semida Silveira1 · Dilip Khatiwada1 · Keiko V. O. Fonseca2 · Rafael Nieweglowski3 · Renan Schepanski3 © The Author(s) 2018 Abstract This study analyses the infuence of passenger load, driving cycle, fuel price and four diferent types of buses on the cost of transport service for one bus rapid transit (BRT) route in Curitiba, Brazil. First, the energy use is estimated for diferent passenger loads and driving cycles for a conventional bi-articulated bus (ConvBi), a hybrid-electric two- axle bus (HybTw), a hybrid-electric articulated bus (HybAr) and a plug-in hybrid-electric two-axle bus (PlugTw). Then, the fuel cost and uncertainty are estimated considering the fuel price trends in the past. Based on this and additional cost data, replacement scenarios for the currently operated ConvBi feet are determined using a techno-economic optimisa- tion model. The lowest fuel cost ranges for the passenger load are estimated for PlugTw amounting to (0.198–0.289) USD/km, followed by (0.255–0.315) USD/km for HybTw, (0.298–0.375) USD/km for HybAr and (0.552–0.809) USD/km for ConvBi. In contrast, C the coefcient of variation ( v ) of the combined standard uncertainty is the highest for C PlugTw ( v : 15–17%) due to stronger sensitivity to varying bus driver behaviour, whereas C it is the least for ConvBi ( v : 8%). -
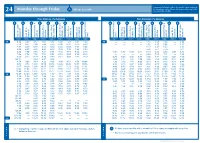
Monday Through Friday Mt
New printed schedules will not be issued if trips are adjusted Monday through Friday All trips accessible by five minutes or less. Please visit www.go-metro.com for the go smart... go METRO 24 most up-to-date schedule. 24 Mt. Lookout–Uptown–Anderson Riding Metro From Anderson / To Downtown From Downtown / To Anderson . 1 No food, beverages or smoking on Metro. 9 8 7 6 5 4 3 2 1 1 2 3 4 5 6 7 8 9 2. Offer front seats to older adults and people with disabilities. METRO* PLUS 3. All Metro buses are 100% accessible for people 38X with disabilities. 46 UNIVERSITY OF 4. Use headphones with all audio equipment 51 CINCINNATI GOODMAN DANA MEDICAL CENTER HIGHLAND including cell phones. Anderson Center Station P&R Salem Rd. & Beacon St. & Beechmont Ave. St. Corbly & Ave. Linwood Delta Ave. & Madison Ave. Observatory Ave. Martin Luther King & Reading Rd. & Auburn Ave. McMillan St. Liberty St. & Sycamore St. Square Government Area B Square Government Area B Liberty St. & Sycamore St. & Auburn Ave. McMillan St. Martin Luther King & Reading Rd. & Madison Ave. Observatory Ave. & Ave. Linwood Delta Ave. & Beechmont Ave. St. Corbly Salem Rd. & Beacon St. Anderson Center Station P&R 11 ZONE 2 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 1 ZONE 2 43 5. Fold strollers and carts. BURNET MT. LOOKOUT AM AM 38X 4:38 4:49 4:57 5:05 5:11 5:20 5:29 5:35 5:40 — — — — 4:10 4:15 4:23 — 4:35 OBSERVATORY READING O’BRYONVILLE LINWOOD 6. -

Skopje Tram-Bus Project
Skopje Tram-Bus Project Non-Technical Summary July 2020 1 Table of Contents 1. Background ................................................................................................................. 1 Introduction ........................................................................................................................... 1 Overview of the Project ......................................................................................................... 1 Project Timeline and Stages ................................................................................................. 4 2. Key Environmental, Health & Safety and Social Findings ........................................ 4 Overview ............................................................................................................................... 4 Project Benefits and Impacts ................................................................................................. 5 Project Benefits ..................................................................................................................... 5 Project Impacts and Risks ..................................................................................................... 5 3. How will Stakeholders be Engaged in the Project? .................................................. 7 What is the Stakeholder Engagement Plan? ......................................................................... 7 Who are the Key Stakeholders? ........................................................................................... -

S92 Orient Point, Greenport to East Hampton Railroad Via Riverhead
Suffolk County Transit Bus Information Suffolk County Transit Fares & Information Vaild March 22, 2021 - October 29, 2021 Questions, Suggestions, Complaints? Full fare $2.25 Call Suffolk County Transit Information Service Youth/Student fare $1.25 7 DAY SERVICE Youths 5 to 13 years old. 631.852.5200 Students 14 to 22 years old (High School/College ID required). Monday to Friday 8:00am to 4:30pm Children under 5 years old FREE SCHEDULE Limit 3 children accompanied by adult. Senior, Person with Disabilities, Medicare Care Holders SCAT Paratransit Service and Suffolk County Veterans 75 cents Personal Care Attendant FREE Paratransit Bus Service is available to ADA eligible When traveling to assist passenger with disabilities. S92 passengers. To register or for more information, call Transfer 25 cents Office for People with Disabilities at 631.853.8333. Available on request when paying fare. Good for two (2) connecting buses. Orient Point, Greenport Large Print/Spanish Bus Schedules Valid for two (2) hours from time received. Not valid for return trip. to East Hampton Railroad To obtain a large print copy of this or other Suffolk Special restrictions may apply (see transfer). County Transit bus schedules, call 631.852.5200 Passengers Please or visit www.sct-bus.org. via Riverhead •Have exact fare ready; Driver cannot handle money. Para obtener una copia en español de este u otros •Passengers must deposit their own fare. horarios de autobuses de Suffolk County Transit, •Arrive earlier than scheduled departure time. Serving llame al 631.852.5200 o visite www.sct-bus.org. •Tell driver your destination. -

Bi-Articulated Bi-Articulated
Bi-articulated Bus AGG 300 Handbuch_121x175_Doppel-Gelenkbus_en.indd 1 22.11.16 12:14 OMSI 2 Bi-articulated bus AGG 300 Developed by: Darius Bode Manual: Darius Bode, Aerosoft OMSI 2 Bi-articulated bus AGG 300 Manual Copyright: © 2016 / Aerosoft GmbH Airport Paderborn/Lippstadt D-33142 Bueren, Germany Tel: +49 (0) 29 55 / 76 03-10 Fax: +49 (0) 29 55 / 76 03-33 E-Mail: [email protected] Internet: www.aerosoft.de Add-on for www.aerosoft.com All trademarks and brand names are trademarks or registered of their respective owners. All rights reserved. OMSI 2 - The Omnibus simulator 2 3 Aerosoft GmbH 2016 OMSI 2 Bi-articulated bus AGG 300 Inhalt Introduction ...............................................................6 Bi-articulated AGG 300 and city bus A 330 ................. 6 Vehicle operation ......................................................8 Dashboard .................................................................. 8 Window console ....................................................... 10 Control lights ............................................................ 11 Main information display ........................................... 12 Ticket printer ............................................................. 13 Door controls ............................................................ 16 Stop display .............................................................. 16 Level control .............................................................. 16 Lights, energy-save and schoolbus function ............... 17 Air conditioning -
Getting to Royal Papworth Hospital Information for Patients Welcome Royal Papworth Hospital – a Brand New Heart and Lung Hospital on the Cambridge Biomedical Campus
Getting to Royal Papworth Hospital Information for patients Welcome Royal Papworth Hospital – a brand new heart and lung hospital on the Cambridge Biomedical Campus. This leafl et gives you some important information about how to get to the hospital and the location of key departments inside the new hospital building. If you have any questions about the new hospital, please don’t hesitate to contact our Patient Advice and Liaison Service on 01223 638896. We look forward to welcoming you to the hospital soon. About our new hospital Royal Papworth Hospital has been designed by our clinicians with patients in mind. It includes: • Five operating theatres, five catheter laboratories (for non-surgical procedures) and two hybrid theatres • Six inpatient wards • 310 beds, including a 46-bed critical care unit and 24 day beds • Mostly en-suite, individual rooms for inpatients • A centrally-located Outpatients unit offering a wide range of diagnostic and treatment facilities • An atrium on the ground floor with a restaurant, coffee shop and convenience store Getting to the new hospital The new hospital is located on the Cambridge Biomedical Campus, near to Addenbrooke’s Hospital, to the south of the city of Cambridge. Travelling by car If you are travelling to the new hospital by car, it may be quicker (and cheaper) to park at Trumpington Park & Ride (postcode CB2 9FT) and take the Guided Bus A directly to the new hospital (a 5-minute journey). Alternatively, you could park at the Babraham Park & Ride site (postcode CB22 3AB) and take the bus to the Addenbrooke’s Hospital bus stop. -

Transit Bus Automation Risks, Barriers, & Mitigations
Transit Bus Automation Risks, Barriers, & Mitigations Introduction In 2016, the Federal Transit Administration (FTA) studied risks and barriers to transit bus automation and developed mitigations as a part of the development of its Strategic Transit Automation Research (STAR) Plan. • Risks are the potential for automated technologies, once in place, to yield negative consequences or for anticipated benefits to go unrealized. • Barriers are obstacles that could prevent or significantly challenge implementation of an automation technology. Both are challenges to the potential implementation of transit bus automation that require the development of mitigation options or strategies to overcome barriers or reduce the likelihood of a risk. This factsheet summarizes the findings of this study. For more information, please see the full report, contained in the STAR Plan. Risks Four categories of risks related to transit automation were identified: Safety and Security: Automated transit buses are at risk of potential hardware and software failures or limitations, human factor errors related to over-reliance on automated assistance or decline in driver skill, and cyber-attacks, as well as potential impedance with emergency response and communications. Operations, Maintenance, & Cost Effectiveness: Transit agencies run the risk of accumulating unrealized costs from technology and transition expenditures, workforce retraining expenses, and increased labor costs due to the need for specialized skills, and technological obsolescence. Changes in service patterns or transit funding mechanisms could lead to additional costs. In addition, automated bus transit will compete against other modes that are moving toward automation. Passenger Experience: Automation could negatively affect passenger experience, or fail to deliver expected benefits. This could include degradation in service reliability, slower travel speeds, reduced access and convenience, inadequate customer service, and poor ride quality. -

SUBJECT: On-Time Performance Improvement Action Plan FROM
SUBJECT: On-Time Performance Improvement Action Plan FROM: Christy Wegener, Director of Planning and Communications DATE: September 28, 2015 Action Requested None – Information only Background This staff report is an update of efforts to improve On-Time Performance (OTP) Discussion In April 2015, staff presented an OTP Action Plan to the Board (Attachment 1), which included an outline of actions to immediately improve OTP. Since that time, several adjustments have been made to route schedules and alignments, as well as improvements to the software that monitors OTP. 1) Fine tuning of software: Over the past five months, staff has worked to adjust the Transit Master software so that it more accurately records OTP. This has included adjusting the stop interval distances, re-geocoding stops, and adjusting the arrival and departure zones for each stop. This process typically takes several attempts in order to achieve the desired results. This involves inputting the data into the system, exporting it to the database, pushing it out to the buses, and finally analyzing the data over several days. 2) Improve the OTP of the Route 10 and the Rapid by 3%: Adjustments have been made to the Route 10 afternoon schedule to better time with the bell at Amador High School. Additional schedule adjustments were made to early morning trips as part of the February 2015 signup. However, achieving a 3% improvement in OTP has not been attained at this point. Improvement in OTP for these routes has been negligible. 3) Identify the top two worst performing routes (Route 3 and Route 54) and make adjustments to schedules to improve respective OTP by 10%.