Circuit Models with Mixed Lumped and Distributed Elements for Passive One-Port Devices
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 6 Two-Port Network Model
Chapter 6 Two-Port Network Model 6.1 Introduction In this chapter a two-port network model of an actuator will be briefly described. In Chapter 5, it was shown that an automated test setup using an active system can re- create various load impedances over a limited range of frequencies. This test set-up can therefore be used to automatically reproduce any load impedance condition (related to a possible application) and apply it to a test or sample actuator. It is then possible to collect characteristic data from the test actuator such as force, velocity, current and voltage. Those characteristics can then be used to help to determine whether the tested actuator is appropriate or not for the case simulated. However versatile and easy to use this test set-up may be, because of its limitations, there is some characteristic data it will not be able to provide. For this reason and the fact that it can save a lot of measurements, having a good linear actuator model can be of great use. Developed for transduction theory [29], the linear model presented in this chapter is 77 called a Two-Port Network model. The automated test set-up remains an essential complement for this model, as it will allow the development and verification of accuracy. This chapter will focus on the two-port network model of the 1_3 tube array actuator provided by MSI (Cf: Figure 5.5). 6.2 Theory of the Two–Port Network Model As a transducer converts energy from electrical to mechanical forms, and vice- versa, it can be modelled as a Two-Port Network that relates the electrical properties at one port to the mechanical properties at the other port. -
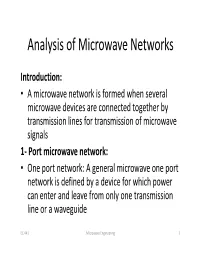
Analysis of Microwave Networks
! a b L • ! t • h ! 9/ a 9 ! a b • í { # $ C& $'' • L C& $') # * • L 9/ a 9 + ! a b • C& $' D * $' ! # * Open ended microstrip line V + , I + S Transmission line or waveguide V − , I − Port 1 Port Substrate Ground (a) (b) 9/ a 9 - ! a b • L b • Ç • ! +* C& $' C& $' C& $ ' # +* & 9/ a 9 ! a b • C& $' ! +* $' ù* # $ ' ò* # 9/ a 9 1 ! a b • C ) • L # ) # 9/ a 9 2 ! a b • { # b 9/ a 9 3 ! a b a w • L # 4!./57 #) 8 + 8 9/ a 9 9 ! a b • C& $' ! * $' # 9/ a 9 : ! a b • b L+) . 8 5 # • Ç + V = A V + BI V 1 2 2 V 1 1 I 2 = 0 V 2 = 0 V 2 I 1 = CV 2 + DI 2 I 2 9/ a 9 ; ! a b • !./5 $' C& $' { $' { $ ' [ 9/ a 9 ! a b • { • { 9/ a 9 + ! a b • [ 9/ a 9 - ! a b • C ) • #{ • L ) 9/ a 9 ! a b • í !./5 # 9/ a 9 1 ! a b • C& { +* 9/ a 9 2 ! a b • I • L 9/ a 9 3 ! a b # $ • t # ? • 5 @ 9a ? • L • ! # ) 9/ a 9 9 ! a b • { # ) 8 -
Scattering Parameters
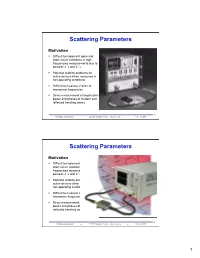
Scattering Parameters Motivation § Difficult to implement open and short circuit conditions in high frequencies measurements due to parasitic L’s and C’s § Potential stability problems for active devices when measured in non-operating conditions § Difficult to measure V and I at microwave frequencies § Direct measurement of amplitudes/ power and phases of incident and reflected traveling waves 1 Prof. Andreas Weisshaar ― ECE580 Network Theory - Guest Lecture ― Fall Term 2011 Scattering Parameters Motivation § Difficult to implement open and short circuit conditions in high frequencies measurements due to parasitic L’s and C’s § Potential stability problems for active devices when measured in non-operating conditions § Difficult to measure V and I at microwave frequencies § Direct measurement of amplitudes/ power and phases of incident and reflected traveling waves 2 Prof. Andreas Weisshaar ― ECE580 Network Theory - Guest Lecture ― Fall Term 2011 1 General Network Formulation V + I + 1 1 Z Port Voltages and Currents 0,1 I − − + − + − 1 V I V = V +V I = I + I 1 1 k k k k k k V1 port 1 + + V2 I2 I2 V2 Z + N-port 0,2 – port 2 Network − − V2 I2 + VN – I Characteristic (Port) Impedances port N N + − + + VN I N Vk Vk Z0,k = = − + − Z0,N Ik Ik − − VN I N Note: all current components are defined positive with direction into the positive terminal at each port 3 Prof. Andreas Weisshaar ― ECE580 Network Theory - Guest Lecture ― Fall Term 2011 Impedance Matrix I1 ⎡V1 ⎤ ⎡ Z11 Z12 Z1N ⎤ ⎡ I1 ⎤ + V1 Port 1 ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ - V2 Z21 Z22 Z2N I2 ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ I2 + ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ V2 Port 2 ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ - V Z Z Z I N-port ⎣ N ⎦ ⎣ N1 N 2 NN ⎦ ⎣ N ⎦ Network I N [V]= [Z][I] V + Port N N + - V Port i i,oc- Open-Circuit Impedance Parameters Port j Ij N-port Vi,oc Zij = Network I j Port N Ik =0 for k≠ j 4 Prof. -

Brief Study of Two Port Network and Its Parameters
© 2014 IJIRT | Volume 1 Issue 6 | ISSN : 2349-6002 Brief study of two port network and its parameters Rishabh Verma, Satya Prakash, Sneha Nivedita Abstract- this paper proposes the study of the various ports (of a two port network. in this case) types of parameters of two port network and different respectively. type of interconnections of two port networks. This The Z-parameter matrix for the two-port network is paper explains the parameters that are Z-, Y-, T-, T’-, probably the most common. In this case the h- and g-parameters and different types of relationship between the port currents, port voltages interconnections of two port networks. We will also discuss about their applications. and the Z-parameter matrix is given by: Index Terms- two port network, parameters, interconnections. where I. INTRODUCTION A two-port network (a kind of four-terminal network or quadripole) is an electrical network (circuit) or device with two pairs of terminals to connect to external circuits. Two For the general case of an N-port network, terminals constitute a port if the currents applied to them satisfy the essential requirement known as the port condition: the electric current entering one terminal must equal the current emerging from the The input impedance of a two-port network is given other terminal on the same port. The ports constitute by: interfaces where the network connects to other networks, the points where signals are applied or outputs are taken. In a two-port network, often port 1 where ZL is the impedance of the load connected to is considered the input port and port 2 is considered port two. -

Scattering Parameters - Wikipedia, the Free Encyclopedia Page 1 of 13
Scattering parameters - Wikipedia, the free encyclopedia Page 1 of 13 Scattering parameters From Wikipedia, the free encyclopedia Scattering parameters or S-parameters (the elements of a scattering matrix or S-matrix ) describe the electrical behavior of linear electrical networks when undergoing various steady state stimuli by electrical signals. The parameters are useful for electrical engineering, electronics engineering, and communication systems design, and especially for microwave engineering. The S-parameters are members of a family of similar parameters, other examples being: Y-parameters,[1] Z-parameters,[2] H- parameters, T-parameters or ABCD-parameters.[3][4] They differ from these, in the sense that S-parameters do not use open or short circuit conditions to characterize a linear electrical network; instead, matched loads are used. These terminations are much easier to use at high signal frequencies than open-circuit and short-circuit terminations. Moreover, the quantities are measured in terms of power. Many electrical properties of networks of components (inductors, capacitors, resistors) may be expressed using S-parameters, such as gain, return loss, voltage standing wave ratio (VSWR), reflection coefficient and amplifier stability. The term 'scattering' is more common to optical engineering than RF engineering, referring to the effect observed when a plane electromagnetic wave is incident on an obstruction or passes across dissimilar dielectric media. In the context of S-parameters, scattering refers to the way in which the traveling currents and voltages in a transmission line are affected when they meet a discontinuity caused by the insertion of a network into the transmission line. This is equivalent to the wave meeting an impedance differing from the line's characteristic impedance. -
Introduction to Transmission Lines
INTRODUCTION TO TRANSMISSION LINES DR. FARID FARAHMAND FALL 2012 http://www.empowermentresources.com/stop_cointelpro/electromagnetic_warfare.htm RF Design ¨ In RF circuits RF energy has to be transported ¤ Transmission lines ¤ Connectors ¨ As we transport energy energy gets lost ¤ Resistance of the wire à lossy cable ¤ Radiation (the energy radiates out of the wire à the wire is acting as an antenna We look at transmission lines and their characteristics Transmission Lines A transmission line connects a generator to a load – a two port network Transmission lines include (physical construction): • Two parallel wires • Coaxial cable • Microstrip line • Optical fiber • Waveguide (very high frequencies, very low loss, expensive) • etc. Types of Transmission Modes TEM (Transverse Electromagnetic): Electric and magnetic fields are orthogonal to one another, and both are orthogonal to direction of propagation Example of TEM Mode Electric Field E is radial Magnetic Field H is azimuthal Propagation is into the page Examples of Connectors Connectors include (physical construction): BNC UHF Type N Etc. Connectors and TLs must match! Transmission Line Effects Delayed by l/c At t = 0, and for f = 1 kHz , if: (1) l = 5 cm: (2) But if l = 20 km: Properties of Materials (constructive parameters) Remember: Homogenous medium is medium with constant properties ¨ Electric Permittivity ε (F/m) ¤ The higher it is, less E is induced, lower polarization ¤ For air: 8.85xE-12 F/m; ε = εo * εr ¨ Magnetic Permeability µ (H/m) Relative permittivity and permeability -

Scattering Parameters
Chapter 1 Scattering Parameters Scattering parameters are a powerful analysis tool, providing much insight on the electrical behavior of circuits and devices at, and beyond microwave frequencies. Most vector network analyzers are designed with the built-in capability to display S parameters. To an experienced engineer, S parameter plots can be used to quickly identify problems with a measurement. A good understanding of their precise meaning is therefore essential. Talk about philosophy behind these derivations in order to place reader into context. Talk about how the derivations will valid for arbitrary complex reference impedances (once everything is hammered out). Talk about the view of pseudo-waves and the mocking of waveguide theory mentionned on p. 535 of [1]. Talk about alterantive point of view where S-parameters are a conceptual tool that can be used to look at real traveling waves, but don’t have to. Call pseudo-waves: traveling waves of a conceptual measurement setup. Is the problem of connecting a transmission line of different ZC than was used for the measurement that it may alter the circuit’s response (ex: might cause different modes to propagate), and thus change the network?? Question: forward/reverse scattering parameters: Is that when the input (port 1) is excited, or simly incident vs. reflected/transmitted??? The reader is referred to [2][1][3] for a more general treatment, including non-TEM modes. Verify this statement, and try to include this if possible. Traveling Waves And Pseudo-Waves Verify the following statements with the theory in [1]. Link to: Scattering and pseudo-scattering matrices. -
WAVEGUIDE ATTENUATORS : in Order to Control Power Levels in a Microwave System by Partially Absorbing the Transmitted Microwave Signal, Attenuators Are Employed
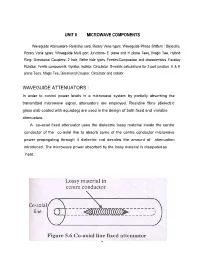
UNIT II MICROWAVE COMPONENTS Waveguide Attenuators- Resistive card, Rotary Vane types. Waveguide Phase Shifters : Dielectric, Rotary Vane types. Waveguide Multi port Junctions- E plane and H plane Tees, Magic Tee, Hybrid Ring. Directional Couplers- 2 hole, Bethe hole types. Ferrites-Composition and characteristics, Faraday Rotation. Ferrite components: Gyrator, Isolator, Circulator. S-matrix calculations for 2 port junction, E & H plane Tees, Magic Tee, Directional Coupler, Circulator and Isolator WAVEGUIDE ATTENUATORS : In order to control power levels in a microwave system by partially absorbing the transmitted microwave signal, attenuators are employed. Resistive films (dielectric glass slab coated with aquadag) are used in the design of both fixed and variable attenuators. A co-axial fixed attenuator uses the dielectric lossy material inside the centre conductor of the co-axial line to absorb some of the centre conductor microwave power propagating through it dielectric rod decides the amount of attenuation introduced. The microwave power absorbed by the lossy material is dissipated as heat. 1 In waveguides, the dielectric slab coated with aquadag is placed at the centre of the waveguide parallel to the maximum E-field for dominant TEIO mode. Induced current on the lossy material due to incoming microwave signal, results in power dissipation, leading to attenuation of the signal. The dielectric slab is tapered at both ends upto a length of more than half wavelength to reduce reflections as shown in figure 5.7. The dielectric slab may be made movable along the breadth of the waveguide by supporting it with two dielectric rods separated by an odd multiple of quarter guide wavelength and perpendicular to electric field. -

Authors Benjamin J
Authors Benjamin J. Chapman, Eric I. Rosenthal, Joseph Kerckhoff, Bradley A. Moores, Leila R. Vale, J. A. B. Mates, Kevin Lalumière, Alexandre Blais, and K.W. Lehnert This article is available at CU Scholar: https://scholar.colorado.edu/jila_facpapers/2 PHYSICAL REVIEW X 7, 041043 (2017) Widely Tunable On-Chip Microwave Circulator for Superconducting Quantum Circuits † Benjamin J. Chapman,1,* Eric I. Rosenthal,1 Joseph Kerckhoff,1, Bradley A. Moores,1 Leila R. Vale,2 ‡ J. A. B. Mates,2 Gene C. Hilton,2 Kevin Lalumi`ere,3, Alexandre Blais,3,4 and K. W. Lehnert1 1JILA, National Institute of Standards and Technology and the University of Colorado, Boulder, Colorado 80309, USA and Department of Physics, University of Colorado, Boulder, Colorado 80309, USA 2National Institute of Standards and Technology, Boulder, Colorado 80305, USA 3D´epartement de Physique, Universit´e de Sherbrooke, Sherbrooke, Qu´ebec J1K 2R1, Canada 4Canadian Institute for Advanced Research, Toronto, Ontario M5G 1Z8, Canada (Received 13 July 2017; published 22 November 2017) We report on the design and performance of an on-chip microwave circulator with a widely (GHz) tunable operation frequency. Nonreciprocity is created with a combination of frequency conversion and delay, and requires neither permanent magnets nor microwave bias tones, allowing on-chip integration with other superconducting circuits without the need for high-bandwidth control lines. Isolation in the device exceeds 20 dB over a bandwidth of tens of MHz, and its insertion loss is small, reaching as low as 0.9 dB at select operation frequencies. Furthermore, the device is linear with respect to input power for signal powers up to hundreds of fW (≈103 circulating photons), and the direction of circulation can be dynamically reconfigured. -
S-Parameter Techniques – HP Application Note 95-1
H Test & Measurement Application Note 95-1 S-Parameter Techniques Contents 1. Foreword and Introduction 2. Two-Port Network Theory 3. Using S-Parameters 4. Network Calculations with Scattering Parameters 5. Amplifier Design using Scattering Parameters 6. Measurement of S-Parameters 7. Narrow-Band Amplifier Design 8. Broadband Amplifier Design 9. Stability Considerations and the Design of Reflection Amplifiers and Oscillators Appendix A. Additional Reading on S-Parameters Appendix B. Scattering Parameter Relationships Appendix C. The Software Revolution Relevant Products, Education and Information Contacting Hewlett-Packard © Copyright Hewlett-Packard Company, 1997. 3000 Hanover Street, Palo Alto California, USA. H Test & Measurement Application Note 95-1 S-Parameter Techniques Foreword HEWLETT-PACKARD JOURNAL This application note is based on an article written for the February 1967 issue of the Hewlett-Packard Journal, yet its content remains important today. S-parameters are an Cover: A NEW MICROWAVE INSTRUMENT SWEEP essential part of high-frequency design, though much else MEASURES GAIN, PHASE IMPEDANCE WITH SCOPE OR METER READOUT; page 2 See Also:THE MICROWAVE ANALYZER IN THE has changed during the past 30 years. During that time, FUTURE; page 11 S-PARAMETERS THEORY AND HP has continuously forged ahead to help create today's APPLICATIONS; page 13 leading test and measurement environment. We continuously apply our capabilities in measurement, communication, and computation to produce innovations that help you to improve your business results. In wireless communications, for example, we estimate that 85 percent of the world’s GSM (Groupe Speciale Mobile) telephones are tested with HP instruments. Our accomplishments 30 years hence may exceed our boldest conjectures. -

Introduction to RF Measurements and Instrumentation
Introduction to RF measurements and instrumentation Daniel Valuch, CERN BE/RF, [email protected] Purpose of the course • Introduce the most common RF devices • Introduce the most commonly used RF measurement instruments • Explain typical RF measurement problems • Learn the essential RF work practices • Teach you to measure RF structures and devices properly, accurately and safely to you and to the instruments Introduction to RF measurements and instrumentation 2 Daniel Valuch CERN BE/RF ([email protected]) Purpose of the course • What are we NOT going to do… But we still need a little bit of math… Introduction to RF measurements and instrumentation 3 Daniel Valuch CERN BE/RF ([email protected]) Purpose of the course • We will rather focus on: Instruments: …and practices: Methods: Introduction to RF measurements and instrumentation 4 Daniel Valuch CERN BE/RF ([email protected]) Transmission line theory 101 • Transmission lines are defined as waveguiding structures that can support transverse electromagnetic (TEM) waves or quasi-TEM waves. • For purpose of this course: The device which transports RF power from the source to the load (and back) Introduction to RF measurements and instrumentation 5 Daniel Valuch CERN BE/RF ([email protected]) Transmission line theory 101 Transmission line Source Load Introduction to RF measurements and instrumentation 6 Daniel Valuch CERN BE/RF ([email protected]) Transmission line theory 101 • The telegrapher's equations are a pair of linear differential equations which describe the voltage (V) and current (I) on an electrical transmission line with distance and time. • The transmission line model represents the transmission line as an infinite series of two-port elementary components, each representing an infinitesimally short segment of the transmission line: Distributed resistance R of the conductors (Ohms per unit length) Distributed inductance L (Henries per unit length). -

A Unified State-Space Approach to Rlct Two-Port
A UNIFIED STATE-SPACE APPROACH TO RLCT TWO-PORT TRANSFER FUNCTION SYNTHESIS By EDDIE RANDOLPH FOWLER Bachelor of Science Kan,sas State University Manhattan, Kansas 1957 Master of Science Kansas State University Manhattan, Kansas 1965 Submitted to the Faculty of the Graduate Col.lege of the Oklahoma State University in partial fulfillment of the requirements for the Degree of DOCTOR OF PHILOSOPHY May, 1969 OKLAHOMA STATE UNIVERSITY LIBRARY SEP 2l1 l969 ~ A UNIFIED STATE-SPACE APPROACH TO RLCT TWO-PORT TRANSFER FUNCTION SYNTHESIS Thesis Approved: Dean of the Graduate College ii AC!!..NOWLEDGEMENTS Only those that have had children in school all during their graduate studies know the effort and sacrifice that my wife, Pat, has endured during my graduate career. I appreciate her accepting this role without complainL Also I am deeply grateful that she was willing to take on the horrendous task of typing this thesis. My heartfelt thanks to Dr. Rao Yarlagadda, my thesis advisor, who was always available for $Uidance and help during the research and writing of this thesis. I appreciate the assistance and encouragement of the other members of my graduate comruitteei, Dr. Kenneth A. McCollom, Dr. Charles M. Bacon ar1d Dr~ K.ar 1 N.... ·Re id., I acknowledge Paul Howell, a fellow Electrical Engineering grad uate student, whose Christian Stewardship has eased the burden during these last months of thesis preparation~ Also Dwayne Wilson, Adminis trative Assistant, has n1y gratitude for assisting with the financial and personal problems of the Electrical Engineering graduate students. My thanks to Dr. Arthur M. Breipohl for making available the assistant ship that was necessary before it was financially possible to initiate my doctoral studies.