Fundamentals of Robotics Verification
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Fun Facts and Activities
Robo Info: Fun Facts and Activities By: J. Jill Rogers & M. Anthony Lewis, PhD Robo Info: Robot Activities and Fun Facts By: J. Jill Rogers & M. Anthony Lewis, PhD. Dedication To those young people who dare to dream about the all possibilities that our future holds. Special Thanks to: Lauren Buttran and Jason Coon for naming this book Ms. Patti Murphy’s and Ms. Debra Landsaw’s 6th grade classes for providing feedback Liudmila Yafremava for her advice and expertise i Iguana Robotics, Inc. PO Box 625 Urbana, IL 61803-0625 www.iguana-robotics.com Copyright 2004 J. Jill Rogers Acknowledgments This book was funded by a research Experience for Teachers (RET) grant from the National Science Foundation. Technical expertise was provided by the research scientists at Iguana Robotics, Inc. Urbana, Illinois. This book’s intended use is strictly for educational purposes. The author would like to thank the following for the use of images. Every care has been taken to trace copyright holders. However, if there have been unintentional omissions or failure to trace copyright holders, we apologize and will, if informed, endeavor to make corrections in future editions. Key: b= bottom m=middle t=top *=new page Photographs: Cover-Iguana Robotics, Inc. technical drawings 2003 t&m; http://robot.kaist.ac.kr/~songsk/robot/robot.html b* i- Iguana Robotics, Inc. technical drawings 2003m* p1- http://www.history.rochester.edu/steam/hero/ *p2- Encyclopedia Mythica t *p3- Museum of Art Neuchatel t* p5- (c) 1999-2001 EagleRidge Technologies, Inc. b* p9- Copyright 1999 Renato M.E. Sabbatini http://www.epub.org.br/cm/n09/historia/greywalter_i.htm t ; http://www.ar2.com/ar2pages/uni1961.htm *p10- http://robot.kaist.ac.kr/~songsk/robot/robot.html /*p11- http://robot.kaist.ac.kr/~songsk/robot/robot.html; Sojourner, http://marsrovers.jpl.nasa.gov/home/ *p12- Sony Aibo, The Sony Corporation of America, 550 Madison Avenue, New York, NY 10022 t; Honda Asimo, Copyright, 2003 Honda Motor Co., Ltd. -

AI, Robots, and Swarms: Issues, Questions, and Recommended Studies
AI, Robots, and Swarms Issues, Questions, and Recommended Studies Andrew Ilachinski January 2017 Approved for Public Release; Distribution Unlimited. This document contains the best opinion of CNA at the time of issue. It does not necessarily represent the opinion of the sponsor. Distribution Approved for Public Release; Distribution Unlimited. Specific authority: N00014-11-D-0323. Copies of this document can be obtained through the Defense Technical Information Center at www.dtic.mil or contact CNA Document Control and Distribution Section at 703-824-2123. Photography Credits: http://www.darpa.mil/DDM_Gallery/Small_Gremlins_Web.jpg; http://4810-presscdn-0-38.pagely.netdna-cdn.com/wp-content/uploads/2015/01/ Robotics.jpg; http://i.kinja-img.com/gawker-edia/image/upload/18kxb5jw3e01ujpg.jpg Approved by: January 2017 Dr. David A. Broyles Special Activities and Innovation Operations Evaluation Group Copyright © 2017 CNA Abstract The military is on the cusp of a major technological revolution, in which warfare is conducted by unmanned and increasingly autonomous weapon systems. However, unlike the last “sea change,” during the Cold War, when advanced technologies were developed primarily by the Department of Defense (DoD), the key technology enablers today are being developed mostly in the commercial world. This study looks at the state-of-the-art of AI, machine-learning, and robot technologies, and their potential future military implications for autonomous (and semi-autonomous) weapon systems. While no one can predict how AI will evolve or predict its impact on the development of military autonomous systems, it is possible to anticipate many of the conceptual, technical, and operational challenges that DoD will face as it increasingly turns to AI-based technologies. -

Robot Control and Programming: Class Notes Dr
NAVARRA UNIVERSITY UPPER ENGINEERING SCHOOL San Sebastian´ Robot Control and Programming: Class notes Dr. Emilio Jose´ Sanchez´ Tapia August, 2010 Servicio de Publicaciones de la Universidad de Navarra 987‐84‐8081‐293‐1 ii Viaje a ’Agra de Cimientos’ Era yo todav´ıa un estudiante de doctorado cuando cayo´ en mis manos una tesis de la cual me llamo´ especialmente la atencion´ su cap´ıtulo de agradecimientos. Bueno, realmente la tesis no contaba con un cap´ıtulo de ’agradecimientos’ sino mas´ bien con un cap´ıtulo alternativo titulado ’viaje a Agra de Cimientos’. En dicho capitulo, el ahora ya doctor redacto´ un pequeno˜ cuento epico´ inventado por el´ mismo. Esta pequena˜ historia relataba las aventuras de un caballero, al mas´ puro estilo ’Tolkiano’, que cabalgaba en busca de un pueblo recondito.´ Ya os podeis´ imaginar que dicho caballero, no era otro sino el´ mismo, y que su viaje era mas´ bien una odisea en la cual tuvo que superar mil y una pruebas hasta conseguir su objetivo, llegar a Agra de Cimientos (terminar su tesis). Solo´ deciros que para cada una de esas pruebas tuvo la suerte de encontrar a una mano amiga que le ayudara. En mi caso, no voy a presentarte una tesis, sino los apuntes de la asignatura ”Robot Control and Programming´´ que se imparte en ingles.´ Aunque yo no tengo tanta imaginacion´ como la de aquel doctorando para poder contaros una historia, s´ı que he tenido la suerte de encontrar a muchas personas que me han ayudado en mi viaje hacia ’Agra de Cimientos’. Y eso es, amigo lector, al abrir estas notas de clase vas a ser testigo del final de un viaje que he realizado de la mano de mucha gente que de alguna forma u otra han contribuido en su mejora. -
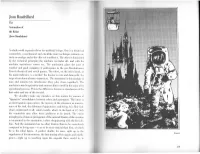
Jean Baudrillard the Automation of the Robot (From Simulations)
Jean Baudrillard The Automation of the Robot (from Simulations) A whole world separates these two artificial beings. One is a theatriclil counteIfeit, a mechanical and clocklike man; technique submits CII- tirely to analogy and to the effect of semblance. The other is dominal('d by the technical principle; the machine overrides aU, and with III(' machine equivalence comes too. The automaton plays the parI of courtier and good company; it participates in the pre-Revolutionar' French theatrical and social games. The robot, on the other hand, IIH his name indicates, is a worker: the theater is over and done with, II", reign of mechanical man commences. The automaton is the analogy 01 man and remains his interlocutor (they play chess together!). TII(\ machine is man's equivalent and annexes him to itself in the unity or ilH operational process. This is the difference between a simulacrum of Ih(, first order and one of the second. We shouldn't make any mistakes on this matter for reasons of "figurative" resemblance between robot and automaton. The latter iH an interrogation upon nature, the mystery of the existence or nonexiH- tence of the soul, the dilemma of appearance and being. It is like God: what's underneath it all, what's inside, what's in the back of it? 0111 the counteIfeit men allow these problems to be posed. The enlin' metaphysics of man as protagonist of the natural theater of the creatioll is incarnated in the automaton, before disappearing with the Revolll tion. And the automaton has no other destiny than to be ceaselcHHI compared to living man-so as to be more natural than him, of which he is the ideal figure. -

The Spider: Anaylsis of an Automaton
The University of Akron IdeaExchange@UAkron Proceedings from the Document Academy University of Akron Press Managed December 2017 The pideS r: Anaylsis of an Automaton Susannah N. Munson Southern Illinois University Carbondale, [email protected] Please take a moment to share how this work helps you through this survey. Your feedback will be important as we plan further development of our repository. Follow this and additional works at: https://ideaexchange.uakron.edu/docam Part of the History Commons, and the Museum Studies Commons Recommended Citation Munson, Susannah N. (2017) "The pS ider: Anaylsis of an Automaton," Proceedings from the Document Academy: Vol. 4 : Iss. 2 , Article 1. DOI: https://doi.org/10.35492/docam/4/2/1 Available at: https://ideaexchange.uakron.edu/docam/vol4/iss2/1 This Article is brought to you for free and open access by University of Akron Press Managed at IdeaExchange@UAkron, the institutional repository of The nivU ersity of Akron in Akron, Ohio, USA. It has been accepted for inclusion in Proceedings from the Document Academy by an authorized administrator of IdeaExchange@UAkron. For more information, please contact [email protected], [email protected]. Munson: The Spider: Analysis of an Automaton In 2017, the Spider automaton sits in the Robots exhibition at the Science Museum in London, surrounded by dozens of other automata. This little clockwork spider is small and relatively unassuming but it, like other physical objects, is a document of an inconceivable amount of information – about itself, its history and associations, and its role in broader social and cultural contexts (Gorichanaz and Latham, 2016). -

Moral and Ethical Questions for Robotics Public Policy Daniel Howlader1
Moral and ethical questions for robotics public policy Daniel Howlader1 1. George Mason University, School of Public Policy, 3351 Fairfax Dr., Arlington VA, 22201, USA. Email: [email protected]. Abstract The roles of robotics, computers, and artifi cial intelligences in daily life are continuously expanding. Yet there is little discussion of ethical or moral ramifi cations of long-term development of robots and 1) their interactions with humans and 2) the status and regard contingent within these interactions– and even less discussion of such issues in public policy. A focus on artifi cial intelligence with respect to differing levels of robotic moral agency is used to examine the existing robotic policies in example countries, most of which are based loosely upon Isaac Asimov’s Three Laws. This essay posits insuffi ciency of current robotic policies – and offers some suggestions as to why the Three Laws are not appropriate or suffi cient to inform or derive public policy. Key words: robotics, artifi cial intelligence, roboethics, public policy, moral agency Introduction Roles for robots Robots, robotics, computers, and artifi cial intelligence (AI) Robotics and robotic-type machinery are widely used in are becoming an evermore important and largely un- countless manufacturing industries all over the globe, and avoidable part of everyday life for large segments of the robotics in general have become a part of sea exploration, developed world’s population. At present, these daily as well as in hospitals (1). Siciliano and Khatib present the interactions are now largely mundane, have been accepted current use of robotics, which include robots “in factories and even welcomed by many, and do not raise practical, and schools,” (1) as well as “fi ghting fi res, making goods moral or ethical questions. -

Symbolic Computation Using Cellular Automata-Based Hyperdimensional Computing
LETTER Communicated by Richard Rohwer Symbolic Computation Using Cellular Automata-Based Hyperdimensional Computing Ozgur Yilmaz ozguryilmazresearch.net Turgut Ozal University, Department of Computer Engineering, Ankara 06010, Turkey This letter introduces a novel framework of reservoir computing that is capable of both connectionist machine intelligence and symbolic com- putation. A cellular automaton is used as the reservoir of dynamical systems. Input is randomly projected onto the initial conditions of au- tomaton cells, and nonlinear computation is performed on the input via application of a rule in the automaton for a period of time. The evolu- tion of the automaton creates a space-time volume of the automaton state space, and it is used as the reservoir. The proposed framework is shown to be capable of long-term memory, and it requires orders of magnitude less computation compared to echo state networks. As the focus of the letter, we suggest that binary reservoir feature vectors can be combined using Boolean operations as in hyperdimensional computing, paving a direct way for concept building and symbolic processing. To demonstrate the capability of the proposed system, we make analogies directly on image data by asking, What is the automobile of air? 1 Introduction Many real-life problems in artificial intelligence require the system to re- member previous input. Recurrent neural networks (RNN) are powerful tools of machine learning with memory. For this reason, they have be- come one of the top choices for modeling dynamical systems. In this letter, we propose a novel recurrent computation framework that is analogous to echo state networks (ESN) (see Figure 1b) but with significantly lower computational complexity. -

Report of Comest on Robotics Ethics
SHS/YES/COMEST-10/17/2 REV. Paris, 14 September 2017 Original: English REPORT OF COMEST ON ROBOTICS ETHICS Within the framework of its work programme for 2016-2017, COMEST decided to address the topic of robotics ethics building on its previous reflection on ethical issues related to modern robotics, as well as the ethics of nanotechnologies and converging technologies. At the 9th (Ordinary) Session of COMEST in September 2015, the Commission established a Working Group to develop an initial reflection on this topic. The COMEST Working Group met in Paris in May 2016 to define the structure and content of a preliminary draft report, which was discussed during the 9th Extraordinary Session of COMEST in September 2016. At that session, the content of the preliminary draft report was further refined and expanded, and the Working Group continued its work through email exchanges. The COMEST Working Group then met in Quebec in March 2017 to further develop its text. A revised text in the form of a draft report was submitted to COMEST and the IBC in June 2017 for comments. The draft report was then revised based on the comments received. The final draft of the report was further discussed and revised during the 10th (Ordinary) Session of COMEST, and was adopted by the Commission on 14 September 2017. This document does not pretend to be exhaustive and does not necessarily represent the views of the Member States of UNESCO. – 2 – REPORT OF COMEST ON ROBOTICS ETHICS EXECUTIVE SUMMARY I. INTRODUCTION II. WHAT IS A ROBOT? II.1. The complexity of defining a robot II.2. -

Robots in Health and Social Care: a Complementary Technology to Home Care and Telehealthcare?
Robotics 2013, 3, 1-21; doi:10.3390/robotics3010001 OPEN ACCESS robotics ISSN 2218-6581 www.mdpi.com/journal/robotics Review Robots in Health and Social Care: A Complementary Technology to Home Care and Telehealthcare? Torbjørn S. Dahl 1 and Maged N. Kamel Boulos 2,* 1 Centre for Robotics and Neural Systems, Plymouth University, Plymouth PL4 8AA, UK; E-Mail: [email protected] 2 Faculty of Health, Plymouth University, Plymouth PL4 8AA, UK * Author to whom correspondence should be addressed; E-Mail: [email protected]; Tel.: +44-1752-586-530; Fax: +44-7053-487-881. Received: 1 November 2013; in revised form: 17 December 2013 / Accepted: 18 December 2013 / Published: 30 December 2013 Abstract: This article offers a brief overview of most current and potential uses and applications of robotics in health/care and social care, whether commercially ready and available on the market or still at the various stages of research and prototyping. We provide carefully hand-picked examples and pointers to on-going research for each set of identified robotics applications and then discuss the main ingredients for the success of these applications, as well as the main issues surrounding their adoption for everyday use, including sustainability in non-technical environments, patient/user safety and acceptance, ethical considerations such as patient/user privacy, and cost effectiveness. We examine how robotics could (partially) fill in some of the identified gaps in current telehealthcare and home care/self-care provisions. The article concludes with a brief glimpse at a couple of emerging developments and promising applications in the field (soft robots and robots for disaster response) that are expected to play important roles in the future. -

Dr. Asimov's Automatons
Dr. Asimov’s Automatons Take on a Life of their Own Twenty years after his death, author Isaac Asimov’s robot fiction offers a blueprint to our robotic future...and the problems we could face by Alan S. Brown HIS PAST April, the University of Miami School These became the Three Laws. Today, they are the starting of Law held We Robot, the first-ever legal and point for any serious conversation about how humans and policy issues conference about robots. The name robots will behave around one another. of the conference, which brought together lawyers, As the mere fact of lawyers discussing robot law shows, engineers, and technologists, played on the title the issue is no longer theoretical. If robots are not yet of the most famous book intelligent, they are increasingly t ever written about robots, autonomous in how they carry out I, Robot, by Isaac Asimov. tasks. At the most basic level, every The point was underscored by day millions of robotic Roombas de- Laurie Silvers, president of Holly- cide how to navigate tables, chairs, wood Media Corp., which sponsored sofas, toys, and even pets as they the event. In 1991, Silvers founded vacuum homes. SyFy, a cable channel that specializ- At a more sophisticated level, es in science fiction. Within moments, autonomous robots help select in- she too had dropped Asimov’s name. ventory in warehouses, move and Silvers turned to Asimov for ad- position products in factories, and vice before launching SyFy. It was a care for patients in hospitals. South natural choice. Asimov was one of the Korea is testing robotic jailers. -
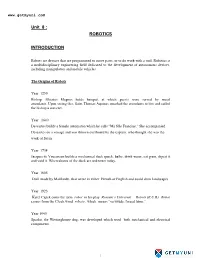
Unit 8 : ROBOTICS INTRODUCTION
www.getmyuni.com Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous devices, including manipulators and mobile vehicles. The Origins of Robots Year 1250 Bishop Albertus Magnus holds banquet at which guests were served by metal attendants. Upon seeing this, Saint Thomas Aquinas smashed the attendants to bits and called the bishop a sorcerer. Year 1640 Descartes builds a female automaton which he calls “Ma fille Francine.” She accompanied Descartes on a voyage and was thrown overboard by the captain, who thought she was the work of Satan. Year 1738 Jacques de Vaucanson builds a mechanical duck quack, bathe, drink water, eat grain, digest it and void it. Whereabouts of the duck are unknown today. Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes Year 1923 Karel Capek coins the term robot in his play Rossum’s Universal Robots (R.U.R). Robot comes from the Czech word robota , which means “servitude, forced labor.” Year 1940 Sparko, the Westinghouse dog, was developed which used both mechanical and electrical components. 1 www.getmyuni.com Year 1950’s to 1960’s Computer technology advances and control machinery is developed. Questions Arise: Is the computer an immobile robot? Industrial Robots created. Robotic Industries Association states that an “industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable programmed motions to perform a variety of tasks” Year 1956 Researchers aim to combine “perceptual and problem-solving capabilities,” using computers, cameras, and touch sensors. -
PERSPECTIVE – Animate Materials 3 4 PERSPECTIVE – Animate Materials Contents
Animate materials PERSPECTIVE Emerging technologies As science expands our understanding of the world it can lead to the emergence of new technologies. These can bring huge benefits, but also challenges, as they change society’s relationship with the world. Scientists, developers and relevant decision-makers must ensure that society maximises the benefits from new technologies while minimising these challenges. The Royal Society has established an Emerging Technologies Working Party to examine such developments. This is the second in a series of perspectives initiated by the working party, the first having focused on the emerging field of neural interfaces. Animate materials Issued: February 2021 DES6757 ISBN: 978-1-78252-515-8 © The Royal Society The text of this work is licensed under the terms of the Creative Commons Attribution Licence, which permits unrestricted use, provided the original author and source are credited. The licence is available at: creativecommons.org/licenses/by/4.0 Images are not covered by this licence. This report can be viewed online at royalsociety.org/animate-materials Animate materials This report identifies a new and potentially transformative class of materials: materials that are created through human agency but emulate the properties of living systems. We call these ‘animate materials’ and they can be defined as those that are sensitive to their environment and able to adapt to it in a number of ways to better fulfil their function. These materials may be understood in relation to three principles of animacy. They are ‘active’, in that they can change their properties or perform actions, often by taking energy, material or nutrients from the environment; ‘adaptive’ in sensing changes in their environment and responding; and ‘autonomous’ in being able to initiate such a response without being controlled.