Optimal Phasing and Performance Mapping for Translunar Satellite Missions Across the Earth-Moon Nodal Cycle
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Preface Patrick Besha, Editor Alexander Macdonald, Editor in The
EARLY DRAFT - NASAWATCH.COM/SPACEREF.COM Preface Patrick Besha, Editor Alexander MacDonald, Editor In the next decade, NASA will seek to expand humanity’s presence in space beyond the International Space Station in low-Earth orbit to a new habitation platform orbiting the moon. By the late 2020’s, astronauts will live and work far deeper in space than ever before. The push to cis-lunar orbit is part of a stepping-stone approach to extend our reach to Mars and beyond. This decision to explore ever farther destinations is a familiar pattern in the history of American space exploration. Another major pattern with historical precedent is the transition from public sector exploration to private sector commercialization. After the government has developed and demonstrated a capability in space, whether it be space-based communications or remote sensing, the private sector has realized its market potential. As new companies establish a presence, the government withdraws from the market. In 2015, we are once again at a critical stage in the development of space. The most successful long-term human habitation in space, orbiting the Earth continuously since 1998, is the International Space Station. Currently at the apex of its capabilities and the pinnacle of state-of-the-art space systems, it was developed through the investments and labors of over a dozen nations and is regularly re-supplied by cargo delivery services. Its occupants include six astronauts and numerous other organisms from Earth’s ecosystems from bacteria to plants to rats. Research is conducted on the spacecraft from hundreds of organizations worldwide ranging from academic institutions to large industrial companies and from high-tech start-ups to high-school science classes. -

The Cubesat Mission to Study Solar Particles (Cusp) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021)
The CubeSat Mission to Study Solar Particles (CuSP) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021) Acknowledgements – National Aeronautics and Space Administration (NASA) and CuSP Principal Investigator, Dr. Mihir Desai, Southwest Research Institute (SwRI) Feature Articles in SYSTEMS Magazine Three-part special series on Artemis I CubeSats - April 2019 (CuSP, IceCube, ArgoMoon, EQUULEUS/OMOTENASHI, & DSN) ▸ - September 2019 (CisLunar Explorers, OMOTENASHI & Iris Transponder) - March 2020 (BioSentinnel, Near-Earth Asteroid Scout, EQUULEUS, Lunar Flashlight, Lunar Polar Hydrogen Mapper, & Δ-Differential One-Way Range) Available in the AESS Resource Center https://resourcecenter.aess.ieee.org/ ▸Free for AESS members ▸ What are CubeSats? A class of small research spacecraft Built to standard dimensions (Units or “U”) ▸ - 1U = 10 cm x 10 cm x 11 cm (Roughly “cube-shaped”) ▸ - Modular: 1U, 2U, 3U, 6U or 12U in size - Weigh less than 1.33 kg per U NASA's CubeSats are dispensed from a deployer such as a Poly-Picosatellite Orbital Deployer (P-POD) ▸NASA’s CubeSat Launch initiative (CSLI) provides opportunities for small satellite payloads to fly on rockets ▸planned for upcoming launches. These CubeSats are flown as secondary payloads on previously planned missions. https://www.nasa.gov/directorates/heo/home/CubeSats_initiative What is CuSP? NASA Science Mission Directorate sponsored Heliospheric Science Mission selected in June 2015 to be launched on Artemis I. ▸ https://www.nasa.gov/feature/goddard/2016/heliophys ics-cubesat-to-launch-on-nasa-s-sls Support space weather research by determining proton radiation levels during solar energetic particle events and identifying suprathermal properties that could help ▸ predict geomagnetic storms. -
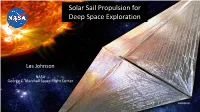
Solar Sail Propulsion for Deep Space Exploration
Solar Sail Propulsion for Deep Space Exploration Les Johnson NASA George C. Marshall Space Flight Center NASA Image We tend to think of space as being big and empty… NASA Image Space Is NOT Empty. We can use the environments of space to our advantage NASA Image Solar Sails Derive Propulsion By Reflecting Photons Solar sails use photon “pressure” or force on thin, lightweight, reflective sheets to produce thrust. 4 NASA Image Real Solar Sails Are Not “Ideal” Billowed Quadrant Diffuse Reflection 4 Thrust Vector Components 4 Solar Sail Trajectory Control Solar Radiation Pressure allows inward or outward Spiral Original orbit Sail Force Force Sail Shrinking orbit Expanding orbit Solar Sails Experience VERY Small Forces NASA Image 8 Solar Sail Missions Flown Image courtesy of Univ. Surrey NASA Image Image courtesy of JAXA Image courtesy of The Planetary Society NanoSail-D (2010) IKAROS (2010) LightSail-1 & 2 CanX-7 (2016) InflateSail (2017) NASA JAXA (2015/2019) Canada EU/Univ. of Surrey The Planetary Society Earth Orbit Interplanetary Earth Orbit Earth Orbit Deployment Only Full Flight Earth Orbit Deployment Only Deployment Only Deployment / Flight 3U CubeSat 315 kg Smallsat 3U CubeSat 3U CubeSat 10 m2 196 m2 3U CubeSat <10 m2 10 m2 32 m2 9 Planned Solar Sail Missions NASA Image NASA Image NASA Image Near Earth Asteroid Scout Advanced Composite Solar Solar Cruiser (2025) NASA (2021) NASA Sail System (TBD) NASA Interplanetary Interplanetary Earth Orbit Full Flight Full Flight Full Flight 100 kg spacecraft 6U CubeSat 12U CubeSat 1653 m2 86 -

Cape Canaveral Air Force Station Support to Commercial Space Launch
The Space Congress® Proceedings 2019 (46th) Light the Fire Jun 4th, 3:30 PM Cape Canaveral Air Force Station Support to Commercial Space Launch Thomas Ste. Marie Vice Commander, 45th Space Wing Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Ste. Marie, Thomas, "Cape Canaveral Air Force Station Support to Commercial Space Launch" (2019). The Space Congress® Proceedings. 31. https://commons.erau.edu/space-congress-proceedings/proceedings-2019-46th/presentations/31 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. Cape Canaveral Air Force Station Support to Commercial Space Launch Colonel Thomas Ste. Marie Vice Commander, 45th Space Wing CCAFS Launch Customers: 2013 Complex 41: ULA Atlas V (CST-100) Complex 40: SpaceX Falcon 9 Complex 37: ULA Delta IV; Delta IV Heavy Complex 46: Space Florida, Navy* Skid Strip: NGIS Pegasus Atlantic Ocean: Navy Trident II* Black text – current programs; Blue text – in work; * – sub-orbital CCAFS Launch Customers: 2013 Complex 39B: NASA SLS Complex 41: ULA Atlas V (CST-100) Complex 40: SpaceX Falcon 9 Complex 37: ULA Delta IV; Delta IV Heavy NASA Space Launch System Launch Complex 39B February 4, 2013 Complex 46: Space Florida, Navy* Skid Strip: NGIS Pegasus Atlantic Ocean: Navy Trident II* Black text – current programs; -

Astronomy News KW RASC FRIDAY JANUARY 8 2021
Astronomy News KW RASC FRIDAY JANUARY 8 2021 JIM FAIRLES What to expect for spaceflight and astronomy in 2021 https://astronomy.com/news/2021/01/what-to-expect-for- spaceflight-and-astronomy-in-2021 By Corey S. Powell | Published: Monday, January 4, 2021 Whatever craziness may be happening on Earth, the coming year promises to be a spectacular one across the solar system. 2020 - It was the worst of times, it was the best of times. First landing on the lunar farside, two impressive successes in gathering samples from asteroids, the first new pieces of the Moon brought home in 44 years, close-up explorations of the Sun, and major advances in low-cost reusable rockets. First Visit to Jupiter's Trojan Asteroids First Visit to Jupiter's Trojan Asteroids In October, NASA is set to launch the Lucy spacecraft. Over its 12-year primary mission, Lucy will visit eight different asteroids. One target lies in the asteroid belt. The other seven are so-called Trojan asteroids that share an orbit with Jupiter, trapped in points of stability 60 degrees ahead of or behind the planet as it goes around the sun. These objects have been trapped in their locations for billions of years, probably since the time of the formation of the solar system. They contain preserved samples of water-rich and carbon-rich material in the outer solar system; some of that material formed Jupiter, while other bits moved inward to contribute to Earth's life-sustaining composition. As a whimsical aside: When meteorites strike carbon-rich asteroids, they create tiny carbon crystals. -

Launch Vehicle Payload Envelope Analysis
CC BY-SA 4.0: Open Source Satellite 2021 Payload Envelope Envelope Payload Launch Vehicle Vehicle Launch Rich Tait, Collaborator OSSAT Analysis June 2021 June Contents Why are launcher envelopes important? Launch vehicles Envelopes Tools Further questions or want to get involved? : SA 4.0 SA - CC BY CC 2021 Satellite OpenSource Why are Launcher Envelopes Important? • Spacecraft experience the harshest mechanical environment during launch. • The mechanical environment can be described across several envelopes: • Quasi-Static Loads • Random Vibration • Acoustic • Shock • Envelopes feed the preliminary design and verification of spacecraft. : SA 4.0 SA - CC BY CC 2021 Satellite OpenSource Launch Vehicles • The analysis extends to the following launch vehicles: • Space X Falcon 9 • Rocket Labs Electron • Virgin Orbit Launcher One • Firefly Alpha • ABL RS1 • Soyuz • ArianeSpace Vega C • Envelopes have been overlayed to allow an overall envelope to be defined for the OSSAT solution. : SA 4.0 SA - CC BY CC 2021 Satellite OpenSource Quasi Static Loads • Combination of steady state and low frequency loads. • Mainly concern the primary structure. • Includes handling loads. : : SA 4.0 SA - SA 4.0 SA - CC BY CC 2021 Satellite OpenSource CC BY CC Satellite Open Source 2021 CC BY BY-SA-SA 4.0 4.0: : Open Source Source Satellite Satellite 2021 2021 • • Random Vibration Random the the launch. intensity overallof gives the GRMS launches. repeatable between Statistically CC BY BY-SA-SA 4.0 4.0: : Open Source Source Satellite Satellite 2021 2021 • • Acoustic the the launch. intensity overallof gives the OASPL the spacecraft. exterior panels of on the incident Acoustic are loads CC BY BY-SA-SA 4.0 4.0: : Open Source Source Satellite Satellite 2021 2021 • Shock Loads Shock payload separation. -

액체로켓 메탄엔진 개발동향 및 시사점 Development Trends of Liquid
Journal of the Korean Society of Propulsion Engineers Vol. 25, No. 2, pp. 119-143, 2021 119 Technical Paper DOI: https://doi.org/10.6108/KSPE.2021.25.2.119 액체로켓 메탄엔진 개발동향 및 시사점 임병직 a, * ㆍ 김철웅 a⋅ 이금오 a ㆍ 이기주 a ㆍ 박재성 a ㆍ 안규복 b ㆍ 남궁혁준 c ㆍ 윤영빈 d Development Trends of Liquid Methane Rocket Engine and Implications Byoungjik Lim a, * ㆍ Cheulwoong Kim a⋅ Keum-Oh Lee a ㆍ Keejoo Lee a ㆍ Jaesung Park a ㆍ Kyubok Ahn b ㆍ Hyuck-Joon Namkoung c ㆍ Youngbin Yoon d a Future Launcher R&D Program Office, Korea Aerospace Research Institute, Korea b School of Mechanical Engineering, Chungbuk National University, Korea c Guided Munitions Team, Hyundai Rotem, Korea d Department of Aerospace Engineering, Seoul National University, Korea * Corresponding author. E-mail: [email protected] ABSTRACT Selecting liquid methane as fuel is a prevailing trend for recent rocket engine developments around the world, triggered by its affordability, reusability, storability for deep space exploration, and prospect for in-situ resource utilization. Given years of time required for acquiring a new rocket engine, a national-level R&D program to develop a methane engine is highly desirable at the earliest opportunity in order to catch up with this worldwide trend towards reusing launch vehicles for competitiveness and mission flexibility. In light of the monumental cost associated with development, fabrication, and testing of a booster stage engine, it is strategically a prudent choice to start with a low-thrust engine and build up space application cases. -

Mscthesis Joseangelgutier ... Humada.Pdf
Targeting a Mars science orbit from Earth using Dual Chemical-Electric Propulsion and Ballistic Capture Jose Angel Gutierrez Ahumada Delft University of Technology TARGETING A MARS SCIENCE ORBIT FROM EARTH USING DUAL CHEMICAL-ELECTRIC PROPULSION AND BALLISTIC CAPTURE by Jose Angel Gutierrez Ahumada MSc Thesis in partial fulfillment of the requirements for the degree of Master of Science in Aerospace Engineering at the Delft University of Technology, to be defended publicly on Wednesday May 8, 2019. Supervisor: Dr. Francesco Topputo, TU Delft/Politecnico di Milano Dr. Ryan Russell, The University of Texas at Austin Thesis committee: Dr. Francesco Topputo, TU Delft/Politecnico di Milano Prof. dr. ir. Pieter N.A.M. Visser, TU Delft ir. Ron Noomen, TU Delft Dr. Angelo Cervone, TU Delft This thesis is confidential and cannot be made public until December 31, 2020. An electronic version of this thesis is available at http://repository.tudelft.nl/. Cover picture adapted from https://steemitimages.com/p/2gs...QbQvi EXECUTIVE SUMMARY Ballistic capture is a relatively novel concept in interplanetary mission design with the potential to make Mars and other targets in the Solar System more accessible. A complete end-to-end interplanetary mission from an Earth-bound orbit to a stable science orbit around Mars (in this case, an areostationary orbit) has been conducted using this concept. Sets of initial conditions leading to ballistic capture are generated for different epochs. The influence of the dynamical model on the capture is also explored briefly. Specific capture trajectories are then selected based on a study of their stabilization into an areostationary orbit. -

ESPA Ring Datasheet
PAYLOAD ADAPTERS | ESPA ESPA THE EVOLVED SECONDARY PAYLOAD ADAPTER ESPA mounts to the standard NSSL (formerly EELV) interface bolt pattern (Atlas V, Falcon 9, Delta IV, OmegA, Vulcan, Courtesy of Lockheed Martin New Glenn) and is a drop-in component in the launch stack. Small payloads mount to ESPA ports featuring either a Ø15-inch bolt circle with 24 fasteners or a 4-point mount with pads at each corner of a 15-inch square; both of these interfaces have become small satellite standards. ESPA is qualified to carry 567 lbs (257 kg), and a Heavy interface Courtesy of NASA (with Ø5/16” fastener hardware) has been introduced with a capacity of 991 lbs (450 kg). All small satellite mass capabilities require the center of gravity (CG) to be within 20 inches (50.8 cm) of the ESPA port surface. Alternative configurations can be accommodated. ESPA GRANDE ESPA Grande is a more capable version of ESPA with Ø24-inch ports; the ring height is typically 42 inches. The Ø24-inch port has been qualified by test to Courtesy of ORBCOMM & Sierra Nevada Corp. carry small satellites up to 1543 lb (700 kg). ESPA ESPA IS ADAPTABLE TO UNIQUE MISSION REQUIREMENTS • The Air Force’s STP-1 mission delivered multiple small satellites on an Atlas V. • NASA’s Lunar Crater Observation and Sensing Satellite (LCROSS): ESPA was the spacecraft hub for the LCROSS shepherding satellite in 2009. • ORBCOMM Generation 2 (OG2) launched stacks of two and three ESPA Grandes on two different Falcon 9 missions and in total deployed 17 satellites. -

Orbital Fueling Architectures Leveraging Commercial Launch Vehicles for More Affordable Human Exploration
ORBITAL FUELING ARCHITECTURES LEVERAGING COMMERCIAL LAUNCH VEHICLES FOR MORE AFFORDABLE HUMAN EXPLORATION by DANIEL J TIFFIN Submitted in partial fulfillment of the requirements for the degree of: Master of Science Department of Mechanical and Aerospace Engineering CASE WESTERN RESERVE UNIVERSITY January, 2020 CASE WESTERN RESERVE UNIVERSITY SCHOOL OF GRADUATE STUDIES We hereby approve the thesis of DANIEL JOSEPH TIFFIN Candidate for the degree of Master of Science*. Committee Chair Paul Barnhart, PhD Committee Member Sunniva Collins, PhD Committee Member Yasuhiro Kamotani, PhD Date of Defense 21 November, 2019 *We also certify that written approval has been obtained for any proprietary material contained therein. 2 Table of Contents List of Tables................................................................................................................... 5 List of Figures ................................................................................................................. 6 List of Abbreviations ....................................................................................................... 8 1. Introduction and Background.................................................................................. 14 1.1 Human Exploration Campaigns ....................................................................... 21 1.1.1. Previous Mars Architectures ..................................................................... 21 1.1.2. Latest Mars Architecture ......................................................................... -

Askeri Lojistikte Uzay Çağı Başlıyor Mu?
Askeri Lojistikte Uzay Çağı Başlıyor mu? zay alanında 60 yıldan fazla zamandır süren insan faaliyetleri, dünyadaki yaşam kalitesini artıran toplumsal faydalar üretti. Uzay araştırmalarının zorlukları, yeni bilimsel ve teknolojik bilgileri ateşleyerek, inovasyonun temel kaynaklarından biri oldu. Uzay araştırmaları, malzeme, enerji üretimi Uve enerji depolama, geri dönüşüm ve atık yönetimi, gelişmiş robotik, tıp ve medikal teknolojiler, ulaşım, mühendislik, bilgi işlem ve yazılım gibi alanlarda dünyaya anında fayda sağladı ve sağlamaya devam edecek. Bu alanlardan biri de roket teknolojisi… Uzay ekonomisinin lokomotifi olan fırlatma sektöründe son yıllarda büyük bir değişim yaşanıyor. Yerden fırlatmalı katı yakıtlı roketlerin maliyetini azaltma arayışları, yeniden kullanılabilir fırlatıcı sistemlerinin geliştirilmesine kapı araladı. Özel uzay şirketlerinin geliştirdiği yeniden kullanılabilir roketler, uzay çalışmalarının maliyetlerini azaltıp daha fazla oyuncunun uzayın olanaklarından yararlanmasının önünü açıyor. Yakın gelecekte yeniden kullanılabilir roketler yeryüzünde de bir ulaşım aracı hâline gelebilir. Örneğin ABD Hava Kuvvetleri, bu roketleri çatışma alanlarına veya insani yardım ihtiyacı duyulan bölgelere lojistik destek sağlamakta kullanmak için harekete geçti. ABD Uzay Kuvvetleri ile birlikte yürütülen Roket Kargo (Rocket Cargo) projesi1, geleneksel askeri kargo uçakları ile saatler hatta günler alabilecek 30 ila 100 ton arasındaki sevkiyatları yeniden kullanılabilir roketlerle 90 dakika2 içinde Dünya’nın herhangi bir noktasına -

Space Coast Is Getting Busy: 6 New Rockets Coming to Cape Canaveral, KSC
4/16/2019 Space Coast is getting busy: 6 new rockets coming to Cape Canaveral, KSC Space Coast is getting busy: 6 new rockets coming to Cape Canaveral, Kennedy Space Center Emre Kelly, Florida Today Published 4:04 p.m. ET April 11, 2019 | Updated 7:53 a.m. ET April 12, 2019 COLORADO SPRINGS, Colo. – If schedules hold, the Space Coast will live up to its name over the next two years as a half-dozen new rockets target launches from sites peppered across the Eastern Range. Company, government and military officials here at the 35th Space Symposium, an annual space conference, have reaffirmed their plans to launch rockets ranging from more traditional heavy-lift behemoths to smaller vehicles that take advantage of new manufacturing technologies. Even if some of these schedules slip, at least one thing is apparent to several spaceflight experts here: The Eastern Range is seeing an unprecedented growth in commercial space companies and efforts. Space Launch System: 2020 NASA's Space Launch System rocket launches from Kennedy Space Center's pad 39B in this rendering by the agency. (Photo: NASA) NASA's long-awaited SLS, a multibillion-dollar rocket announced in 2011, is slated to become the most powerful launch vehicle in history if it can meet a stringent late 2020 deadline. The 322-foot-tall rocket is expected to launch on its first flight – Exploration Mission 1 – from Kennedy Space Center with an uncrewed Orion capsule for a mission around the moon, which fits in with the agency's wider goal of putting humans on the surface by 2024.