Der Unverstand Der Moderne
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Century of Scholarship 1881 – 2004
A Century of Scholarship 1881 – 2004 Distinguished Scholars Reception Program (Date – TBD) Preface A HUNDRED YEARS OF SCHOLARSHIP AND RESEARCH AT MARQUETTE UNIVERSITY DISTINGUISHED SCHOLARS’ RECEPTION (DATE – TBD) At today’s reception we celebrate the outstanding accomplishments, excluding scholarship and creativity of Marquette remarkable records in many non-scholarly faculty, staff and alumni throughout the pursuits. It is noted that the careers of last century, and we eagerly anticipate the some alumni have been recognized more coming century. From what you read in fully over the years through various this booklet, who can imagine the scope Alumni Association awards. and importance of the work Marquette people will do during the coming hundred Given limitations, it is likely that some years? deserving individuals have been omitted and others have incomplete or incorrect In addition, this gathering honors the citations in the program listing. Apologies recipient of the Lawrence G. Haggerty are extended to anyone whose work has Faculty Award for Research Excellence, not been properly recognized; just as as well as recognizing the prestigious prize scholarship is a work always in progress, and the man for whom it is named. so is the compilation of a list like the one Presented for the first time in the year that follows. To improve the 2000, the award has come to be regarded completeness and correctness of the as a distinguishing mark of faculty listing, you are invited to submit to the excellence in research and scholarship. Graduate School the names of individuals and titles of works and honors that have This program lists much of the published been omitted or wrongly cited so that scholarship, grant awards, and major additions and changes can be made to the honors and distinctions among database. -

BUDGET SUMMARY FUND: General - 0001 Budget Summary
ZOO (9500) BUDGET UNIT NO. 9500 ZOODepartment: (9500) B ZooUDGET FUND: General — 0001 DEPT: Zoo UNIT NO. 9500 BUDGET SUMMARY FUND: General - 0001 Budget Summary 2018/2017 Category 2015 Actual 2016 Actual 2017 Budget 2018 Budget Variance Expenditures Personnel Costs $14,022,989 $12,497,641 $8,908,648 $7,910,189 ($998,459) Operation Costs $8,699,215 $8,299,153 $9,443,234 $6,955,348 ($2,487,886) Debt & Depreciation $0 $0 $0 $0 $0 Capital Outlay $422,184 $871,245 $1,000,530 $572,311 ($428,219) Interdept. Charges $2,368,887 $2,097,586 $2,432,572 $587,070 ($1,845,502) Total Expenditures $25,513,275 $23,765,626 $21,784,984 $16,024,918 ($5,760,066) Legacy Healthcare/Pension $2,842,212 $3,505,004 $3,303,498 $0 ($3,303,498) Revenues Direct Revenue $18,782,514 $17,879,903 $20,161,031 $16,853,982 ($3,307,049) Intergov Revenue $0 $34,000 $0 $0 $0 Indirect Revenue $0 $0 $0 $0 $0 Total Revenues $18,782,514 $17,913,903 $20,161,031 $16,853,982 ($3,307,049) Tax Levy $6,730,761 $5,851,723 $1,623,953 ($829,064) ($2,453,017) Effective Tax Levy* ($915,125) $334,133 ($788,099) ($1,416,134) ($628,035) Personnel Full-Time Pos. (FTE)** 126.81 128.77 124.98 125.11 0.13 Seas/Hourly/Pool Pos. 125.66 124.36 125.91 75.41 (50.50) Overtime $ $233,464 $247,001 $312,540 $270,324 ($42,216) *This Effective Tax Levy excludes interdepartmental charges and fringe benefit costs ** The 2018 Budget FTEs include Vacancy & Turnover (VANDT) & Overtime (OT). -

January/February 1996
Your high school library can have a free subscription to ANIMAL PEOPLE–– Nonprofit the only independent newspaper covering all the news about animal protection. Organization Send your acceptance to: U.S. Postage ANIMAL PEOPLE, POB 205, Shushan, NY 12873, or fax it to 518-854-9601. Paid ANIMAL PEOPLE has no alignment or affiliation with any advocacy organization. ANIMAL PEOPLE, Out of cod, Canada tells fishers "kill seals" Inc. ST. JOHNS, Newfoundland––Blaming harp seals for a 99% decline in the mass of spawning cod off the Atlantic coast of POB 205, SHUSHAN, NY 12873 Newfoundland, Canadian Fisheries Minister Brian Tobin on [ADDRESS CORRECTION REQUESTED.] December 18 moved to appease out-of-work cod fishers in his home province by expanding the 1996 seal killing quota to 250,000––actually higher than many annual quotas during the peak years of the seal hunt in the 1970s and early 1980s. In effect resuming the all-out seal massacres that prompt- ed international protest until clubbing newborn whitecoats and hunting seals from large vessels was suspended in 1983, Tobin also pledged to maintain a bounty of about 15¢ U.S. per pound for each dead seal landed, and said he would encourage the revived use of large vessels to help sealers attack seal breeding colonies on offshore ice floes. rassed by an International Fund for Animal Welfare campaign The prohibition on killing whitecoats remains in effect, worldwide to expose the lack of market demand for seal products. but only means young seals will be killed not as newborns but as A report on seal marketing strategy commissioned by the Canadian two-week-old beaters, just beginning to molt and crawl. -

Chapter 11 ) LAKELAND TOURS, LLC, Et Al.,1 ) Case No
20-11647-jlg Doc 205 Filed 09/30/20 Entered 09/30/20 13:16:46 Main Document Pg 1 of 105 UNITED STATES BANKRUPTCY COURT SOUTHERN DISTRICT OF NEW YORK ) In re: ) Chapter 11 ) LAKELAND TOURS, LLC, et al.,1 ) Case No. 20-11647 (JLG) ) Debtors. ) Jointly Administered ) AFFIDAVIT OF SERVICE I, Julian A. Del Toro, depose and say that I am employed by Stretto, the claims and noticing agent for the Debtors in the above-captioned case. On September 25, 2020, at my direction and under my supervision, employees of Stretto caused the following document to be served via first-class mail on the service list attached hereto as Exhibit A, via electronic mail on the service list attached hereto as Exhibit B, and on three (3) confidential parties not listed herein: Notice of Filing Third Amended Plan Supplement (Docket No. 200) Notice of (I) Entry of Order (I) Approving the Disclosure Statement for and Confirming the Joint Prepackaged Chapter 11 Plan of Reorganization of Lakeland Tours, LLC and Its Debtor Affiliates and (II) Occurrence of the Effective Date to All (Docket No. 201) [THIS SPACE INTENTIONALLY LEFT BLANK] ________________________________________ 1 A complete list of each of the Debtors in these chapter 11 cases may be obtained on the website of the Debtors’ proposed claims and noticing agent at https://cases.stretto.com/WorldStrides. The location of the Debtors’ service address in these chapter 11 cases is: 49 West 45th Street, New York, NY 10036. 20-11647-jlg Doc 205 Filed 09/30/20 Entered 09/30/20 13:16:46 Main Document Pg 2 of 105 20-11647-jlg Doc 205 Filed 09/30/20 Entered 09/30/20 13:16:46 Main Document Pg 3 of 105 Exhibit A 20-11647-jlg Doc 205 Filed 09/30/20 Entered 09/30/20 13:16:46 Main Document Pg 4 of 105 Exhibit A Served via First-Class Mail Name Attention Address 1 Address 2 Address 3 City State Zip Country Aaron Joseph Borenstein Trust Address Redacted Attn: Benjamin Mintz & Peta Gordon & Lucas B. -
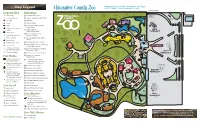
Map Legend 10001 W
Map Legend 10001 W. Bluemound Rd., Milwaukee, WI 53226 414-771-3040 www.milwaukeezoo.org Milwaukee County Zoo Bluemound Rd. Legend Key Buildings Auto teller 8 Animal Health Center Walk-In Entrance Zoofari Change Machine 9 Aquatic & Reptile Center (ARC) Drive-in Exit Animal Health Entrance Conference Center Center First Aid 0 Australia Sea Lion Birds Food - Dairy Complex Show g s Gifts = Dohmen Family Foundation Special Hippo Home Exhibit Handicap/Changing Macaque Island Zebra Station q Family Farm & Public Affairs Office Flamingo Parking Lot Information Swan w Florence Mila Borchert Lost Children’s Area Big Cat Country Fish, an Frogs & angut Mold-a-Rama e Herb & Nada Mahler Family Expedition Snakes Or Primates Apes Aviary Welcome Penny Press Dinosaur Center Summer Gorilla r Holz Family Impala Country 2015 Penguins j Private Picnic Areas ARC Bonobo t Idabel Wilmot Borchert Flamingo Theatre Rest Rooms Siamang Exhibit and Overlook Small Mammals Ropes Courses h Strollers sponsored & y Karen Peck Katz Conservation Zip Line by Wilderness Resort Education Center Giraffe Tornado Shelter u Kohl’s Cares for Kids Play Area Parking Lot i Northwestern Mutual Zoo Rides Family Farm Carousel sponsored African e Briggs o A. Otto Borchert Family Waterhol & Stratton by Penzeys Spices Special Exhibits Building a Zoo ebr Terrace Z Safari Train sponsored B. Jungle Birthday Room Lion by North Shore Bank Cheet Family p Peck Welcome Center Big African Kohl’s Farm Cats Savanna Wild ah Theater Sky Safari sponsored Sky JaguarT [ Primates of the World iger Safari South Live alks by PNC* Prairie America Grizzly Bear Snow Animal T Dairy Elephant ] Small Mammals Building Caribou Dogs Leopard Bongo Barn SkyTrail® Explorer Black Parking Lot Elk Bear Red Hippo Butterfly \ Stackner Animal Encounter Panda Garden Butterfly Ropes Courses & Zip Garden Camel W Line sponsored by a Stearns Family Apes of Africa arthog Bee Pachyderm Hive Exhibit Tri City National Bank* Tapir Pachyderm s Taylor Family Humboldt Penguins d Zoomobile sponsored Education d U.S. -

Monorail, Satellite City District, Uniform System Mass Transport in the Cities
International Journal of Traffic and Transportation Engineering 2017, 6(2): 36-42 DOI: 10.5923/j.ijtte.20170602.03 Satellite Boroughs Connection Vladimír Strakoš1, Michal Novák2,3,* 1Supervisor of Doctoral Studies, College of Logistics, Commercial Benefit Corporation, Přerov, Czech Republic 2Combined Studies Doctoral Student of the Faculty of Transportation Sciences, Department of Logistics and Management of Transport, Czech Technical University in Prag, Czech Republic 3Dispatcher Passenger Traffic for the Region Bohemia, Czech Railways, Inc., General Directorate, O 11 – Department of Control Operation of Personal Transport, Czech Republic Abstract The aim of this article is to introduce to the non-professional and professional public the use of monorail as a vehicle for connection of the satellite city districts. The issue of the article is to show how can be different routes monorail boroughs connected with a uniform system of public transport between residents and work places. The combination of satellite boroughs via monorail provides its potential users quality and fast transport between the residences and work places. The system relieves congested roads; it also provides the availability of more urban parts of one or more cities and, ultimately contributes significantly to the environmentally friendly solution for public transport in cities. With the use of solar energy it will also ensure environmental friendliness over each individual point of the line´s length. The main contribution of the paper is to draw out a possible solution for public transport by using the existing modes of transport known today to resolve the temporal and convenient access to employment in urban areas without the inefficient solutions to individual automobile transport. -

Appendix a Monorail Database Formatted 1.13.2020.Xlsx
Appendix A Global Scan Summary Number and Type Location Year Open Length # Stations Ridership (Daily Average) Ridership (Annual) Speed Travel Time Design/Construction Cost Infrastructure Technology/Guidence System of Vehicles Australia, 1989 (Closed 2017) Straddle-beam Steel box beam Broadbeach Australia, Queensland, Sea 1986 1.2 miles 2 17 mph $3M (Australian) 3, 9-car trains Straddle-beam Von Roll Mk II World 500 V AV power, generator provided to clear trains in emergencies. Built to operate 12 minutes (entire Von Roll Type III, 6, Australia, Sydney 1988 (Closed 2013) 2.24 miles 8 70 million (lifetime) 21 mph (average) $55 million USD Straddle-beam autonomously, breakdowns loop) 7-car trains (construction) soon after opening led to $10-15 million USD decision to retain drivers for (demolish) each train Approx. $550,000 dollars Belgium, Lichtaart 1975 1.15 miles 3 4.7 mph 15 minutes Straddle-beam Schwarzkopf (1978) 2021 (proposed Capacity of 150,000 $650 million Brazil, Salvador 12.4 miles 22 Straddle-beam BYD Skyrail estimate) passengers a day (approximately) 54 seven-car trains 500,000 (estimated once fully $1.6 billion (estimated for Brazil, Sao Paulo, 12 min (50 minutes (total once Phase 1: 2016 4.7 miles (out of 17 6 (out of 18 completed) entire project, not clear CITYFLO 650 automatic train Line 15 (Expresso 50 mph (average) end to end once completed), Straddle-beam Phase 2: 2018 miles planned) planned) 40,000 passengers per hour what is included in this control Tiradentes) fully completed) Bombardier Innova per direction amount) -

Optimisation of Traction and Fixing Systems in Suspended Monorails
This paper is part of the Proceedings of the 15th International Conference on Railway Engineering Design and Operation (CR 2016) www.witconferences.com Optimisation of traction and fixing systems in suspended monorails J. Yunta, D. Fernandez, D. Garcia-Pozuelo, V. Diaz, B. L. Boada & M. B. Ramírez Departamento de Ingeniería Mecánica, Instituto para la Seguridad de los Vehículos Automóviles (ISVA), Universidad Carlos III de Madrid, Spain Abstract Means of transport are a key point in the development of countries and the population interconnection, so the continuous improvement of them is an obligation and a challenge as well. The mean of transport selected for improvement is the monorail, which serves as a single rail track to transport cargo or passengers. In most cases, the monorail drives around suspension, but can also drive at ground level or tunnels. The aim of this work is the analysis of the optimisation design and technical feasibility of the traction and fixing systems of the monorail. A comparative technical analysis of these systems has been carried out to quantify them, assessing the strengths and weaknesses. Once the system idea to develop and optimise is defined, basic parameters and characteristics of the system are detailed, commercial elements are selected and a traction-fixing system model is modelled. The traction-fixing system has also been optimised with various loading limited conditions like static, modal and thermal analysis. FEM with Abaqus/CAE and CAD-CAM modelling with AutoCAD have been used in this work. Keywords: suspended monorail, optimisation, comparative technical analysis, design alternative, FEM, computer simulations, 3D modelling. 1 Introduction The monorail is a mean of transport in which carriages are moved in suspension or on a single rail structure and they are used for carrying passengers or cargo [1]. -

Table of Contents
DMJM+HARRIS Monorail Technology Assessment TABLE OF CONTENTS LIST OF FIGURES 6 LIST OF TABLES 6 1.0 EXECUTIVE SUMMARY 7 2.0 PURPOSE OF ASSESSMENT 12 3.0 SCOPE OF WORK 12 4.0 METHODOLOGY 12 5.0 INITIAL SCREENING OF TECHNOLOGIES 14 5.1 Insufficient Information Available for Determination 14 5.2 Systems No Longer Marketed 14 5.3 System Characteristics Inconsistent with Needs of Montgomery County 15 5.4 Systems Recommended for Further Evaluation 16 5.4.1 Systems in Operation 16 5.4.2 Systems in Development 16 5.5 Classification of Candidate Systems 17 6.0 REFINEMENT OF LIST 18 7.0 MEASURES OF EFFECTIVENESS 24 8.0 COMPARISON BETWEEN MODES OF TRANSPORTATION 25 8.1 Overview 25 8.2 Proposed Measures of Effectiveness 25 8.2.1 Capacity 25 8.2.2 Speed 25 8.2.3 Cost 25 8.3 Other Factors 26 12/18/2001 Final 2 DMJM+HARRIS Monorail Technology Assessment 8.3.1 Automation 26 8.3.2 Expandability 26 8.3.3 Maintenance 26 8.3.4 Yard and Shop 26 8.3.5 Safety 26 8.3.6 Compatibility 26 8.3.7 Maneuverability 27 8.3.8 Visual impacts 27 9.0 PROJECT REVIEW TEAM INPUT 27 9.1 General Concerns Regarding Monorail Technologies 27 9.2 Evaluation of Measures of Effectiveness 28 10.0 SYSTEMS REVIEWED IN DETAIL 28 10.1 OTG HighRoad 28 10.1.1 Background/System Description 28 10.1.2 Existing Locations 28 10.1.3 Vehicle/Guide way/Station Description 28 10.1.4 Capacity 30 10.1.5 Costs 30 10.1.6 Feasibility 30 10.1.7 Environmental Considerations 31 10.2 Futrex 32 10.2.1 Background/System Description 32 10.2.2 Existing Locations 32 10.2.3 Vehicle/Guide way/Station Description 32 -

2007 Annual Report
2007 Annual Report Transforming passionate commitment to wildlife into effective conservation CONTENTS From the Executive Director 2 From the Chairman 3 Harnessing the Power of Mass Collaboration Tools for Endangered Species Conservation 4 Responding to the Need for Effective Management for All Species 6 Success Stories: Developing a Global Action Plan for Tapirs 8 Recovering a Tiny Fish in a Grand River 9 Refocusing Reintroduction in South Asia 10 Bringing the Mexican Wolf Home 11 Assessing Costa Rican Amphibians 12 Preserving the Green Toad in Sweden 13 Saving the Last Kihansi Spray Toads 13 CBSG Conservation Activities in 2007: 2007 PHVA and CAMP Workshops / Sponsors 14 2007 Facilitation and Risk Assessment Training Workshops / Sponsors 16 2007 Organizational and Species Conservation Planning Workshops / Sponsors 17 About CBSG 18 CBSG Staff & Regional Networks 19 CBSG Donors 20 2007 Sponsors of CBSG Participation in Conservation Workshops/Meetings 21 Financial Information 22 2007 Ulysses S. Seal Award 24 Paper, Printing and Sustainability 24 OUR MISSION CBSG’s mission is to save threatened species by increasing the effectiveness of conservation efforts worldwide. Through: • innovative and interdisciplinary methodologies, • culturally sensitive and respectful facilitation, and • empowering global partnerships and collaborations, CBSG transforms passionate commitment to wildlife into effective conservation. CONSERVATION BREEDING SPECIALIST GROUP We’re ALL IN CBSG TOGETHER At a WAZA conference several years ago, the keynote speaker referred to CBSG as the “Captive Breeding Specialist Group.” When Ed McAlister, then President of WAZA, stood to thank the speaker, he corrected the error saying, “We are the Conservation Breeding Specialist Group.” He didn’t say “they” or “it.” He said “we.” I remember the great pride I felt at that moment as I realized that we are, in fact, all in CBSG together. -

A Review of the Welfare of Zoo Elephants in Europe
A Review of the Welfare of Zoo Elephants in Europe of Zoo Elephants inEurope A Review of theWelfare A Review of the Welfare of A Review of Zoo Elephants the Welfare of in Europe Zoo Elephants in Europe A report commissioned by the RSPCA Ros Clubband Georgia Mason Ros Clubb and Georgia Mason University of Oxford, University of Oxford, Animal behaviour research group, Animal behaviour research group, Department of Department of Zoology, South Parks Road, Oxford OX1 3PS CAILEY OWEN,WILD IMAGES/RSPCA PHOTOLIBRARY Zoology, South Parks Road, Oxford OX1 3PS A Review of the Welfare of Zoo Elephants in Europe A report commissioned by the RSPCA Ros Clubb & Georgia Mason University of Oxford, Animal Behaviour Research Group, Department of Zoology, South Parks Road, Oxford OX1 3PS. ACKNOWLEDGEMENTS We would like to thank the following people for kindly providing data included in this report: Rob Belterman; Thomas Hildebrandt; Martin Hutter; Fred Kurt; Khyne U. Mar; Joerke Nijboer; PETA; Bruce Schulte; Miranda Stevenson; Amelia Terkel; Megan Wilson. We would also like to thank to following people for their help and advice: Robert Atkinson; Scott Blais; Carol Buckley; Iain Douglas-Hamilton; Jo Fawthropp; Gale Laule; Matthew Leach; Phyllis Lee; Mick Jones and colleagues at Chester Zoo; Marthe Kiley-Worthington; Dan Koehl; Nick Lindsey; Danny Mills; Mark Pilgrim; Henrik Rasmussen; Lee Sambrook and colleagues at Whipsnade Wild Animal Park; Jeanette Schmid; Iain Valentine; Fritz Vollrath; Stephanie Wehnelt; Chris West, Adroaldo Zanella. We would especially like to thank Robert Atkinson, Miranda Stevenson and Chris West for proof- reading the entire ‘mammoth’ report; as well as Chris Furley, Carol Buckley and Nick Lindsey for reading through specific chapters. -

Brooks Announces Seneca Park Zoo to Say Goodbye to Two African Lions
Thursday, November 19, 2015 BROOKS ANNOUNCES SENECA PARK ZOO TO SAY GOODBYE TO TWO AFRICAN LIONS Two female lionesses will move to Milwaukee County Zoo later this year Monroe County Executive Maggie Brooks today announced that two of the Zoo’s African lions, Savannah and Amali, will be leaving Seneca Park Zoo later this year. The two female lionesses are heading to Milwaukee County Zoo in Wisconsin as part of a recommendation from the Association of Zoos and Aquariums (AZA) Species Survival Plan (SSP) for this vulnerable species. “Our Zoo and its visitors have enjoyed the opportunity to watch Savannah and Amali grow over the past two years. It will be a bittersweet day when we say goodbye and send them off to their new home,” said County Executive Maggie Brooks. “However, their departure opens up opportunity for a new beginning at our zoo and we are looking forward to the possibility of new cubs in the future.” Savannah, born at Seneca Park Zoo in 2013 and named through a public contest, may receive a future breeding recommendation with one of the Milwaukee County Zoo’s male lions. She is particularly desirable because her parents, Chester and Asha — who will continue to reside at the Zoo — represent new genes in the North American population of African lions in conservation care. Amali was born at the Wildlife Conservation Society's Bronx Zoo in March 2013 and has resided at Seneca Park Zoo since July 2013. Because she has more relatives in the population in conservation care, Amali does not currently have a breeding recommendation.