Equations of Motion
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -
Understanding Eddy Field in the Arctic Ocean from High-Resolution Satellite Observations Igor Kozlov1, A
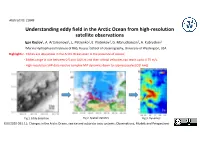
Abstract ID: 21849 Understanding eddy field in the Arctic Ocean from high-resolution satellite observations Igor Kozlov1, A. Artamonova1, L. Petrenko1, E. Plotnikov1, G. Manucharyan2, A. Kubryakov1 1Marine Hydrophysical Institute of RAS, Russia; 2School of Oceanography, University of Washington, USA Highlights: - Eddies are ubiquitous in the Arctic Ocean even in the presence of sea ice; - Eddies range in size between 0.5 and 100 km and their orbital velocities can reach up to 0.75 m/s. - High-resolution SAR data resolve complex MIZ dynamics down to submesoscales [O(1 km)]. Fig 1. Eddy detection Fig 2. Spatial statistics Fig 3. Dynamics EGU2020 OS1.11: Changes in the Arctic Ocean, sea ice and subarctic seas systems: Observations, Models and Perspectives 1 Abstract ID: 21849 Motivation • The Arctic Ocean is a host to major ocean circulation systems, many of which generate eddies transporting water masses and tracers over long distances from their formation sites. • Comprehensive observations of eddy characteristics are currently not available and are limited to spatially and temporally sparse in situ observations. • Relatively small Rossby radii of just 2-10 km in the Arctic Ocean (Nurser and Bacon, 2014) also mean that most of the state-of-art hydrodynamic models are not eddy-resolving • The aim of this study is therefore to fill existing gaps in eddy observations in the Arctic Ocean. • To address it, we use high-resolution spaceborne SAR measurements to detect eddies over the ice-free regions and in the marginal ice zones (MIZ). EGU20 -OS1.11 – Kozlov et al., Understanding eddy field in the Arctic Ocean from high-resolution satellite observations 2 Abstract ID: 21849 Methods • We use multi-mission high-resolution spaceborne synthetic aperture radar (SAR) data to detect eddies over open ocean and marginal ice zones (MIZ) of Fram Strait and Beaufort Gyre regions. -

Classical Mechanics
Classical Mechanics Hyoungsoon Choi Spring, 2014 Contents 1 Introduction4 1.1 Kinematics and Kinetics . .5 1.2 Kinematics: Watching Wallace and Gromit ............6 1.3 Inertia and Inertial Frame . .8 2 Newton's Laws of Motion 10 2.1 The First Law: The Law of Inertia . 10 2.2 The Second Law: The Equation of Motion . 11 2.3 The Third Law: The Law of Action and Reaction . 12 3 Laws of Conservation 14 3.1 Conservation of Momentum . 14 3.2 Conservation of Angular Momentum . 15 3.3 Conservation of Energy . 17 3.3.1 Kinetic energy . 17 3.3.2 Potential energy . 18 3.3.3 Mechanical energy conservation . 19 4 Solving Equation of Motions 20 4.1 Force-Free Motion . 21 4.2 Constant Force Motion . 22 4.2.1 Constant force motion in one dimension . 22 4.2.2 Constant force motion in two dimensions . 23 4.3 Varying Force Motion . 25 4.3.1 Drag force . 25 4.3.2 Harmonic oscillator . 29 5 Lagrangian Mechanics 30 5.1 Configuration Space . 30 5.2 Lagrangian Equations of Motion . 32 5.3 Generalized Coordinates . 34 5.4 Lagrangian Mechanics . 36 5.5 D'Alembert's Principle . 37 5.6 Conjugate Variables . 39 1 CONTENTS 2 6 Hamiltonian Mechanics 40 6.1 Legendre Transformation: From Lagrangian to Hamiltonian . 40 6.2 Hamilton's Equations . 41 6.3 Configuration Space and Phase Space . 43 6.4 Hamiltonian and Energy . 45 7 Central Force Motion 47 7.1 Conservation Laws in Central Force Field . 47 7.2 The Path Equation . -
The General Circulation of the Atmosphere and Climate Change
12.812: THE GENERAL CIRCULATION OF THE ATMOSPHERE AND CLIMATE CHANGE Paul O'Gorman April 9, 2010 Contents 1 Introduction 7 1.1 Lorenz's view . 7 1.2 The general circulation: 1735 (Hadley) . 7 1.3 The general circulation: 1857 (Thompson) . 7 1.4 The general circulation: 1980-2001 (ERA40) . 7 1.5 The general circulation: recent trends (1980-2005) . 8 1.6 Course aim . 8 2 Some mathematical machinery 9 2.1 Transient and Stationary eddies . 9 2.2 The Dynamical Equations . 12 2.2.1 Coordinates . 12 2.2.2 Continuity equation . 12 2.2.3 Momentum equations (in p coordinates) . 13 2.2.4 Thermodynamic equation . 14 2.2.5 Water vapor . 14 1 Contents 3 Observed mean state of the atmosphere 15 3.1 Mass . 15 3.1.1 Geopotential height at 1000 hPa . 15 3.1.2 Zonal mean SLP . 17 3.1.3 Seasonal cycle of mass . 17 3.2 Thermal structure . 18 3.2.1 Insolation: daily-mean and TOA . 18 3.2.2 Surface air temperature . 18 3.2.3 Latitude-σ plots of temperature . 18 3.2.4 Potential temperature . 21 3.2.5 Static stability . 21 3.2.6 Effects of moisture . 24 3.2.7 Moist static stability . 24 3.2.8 Meridional temperature gradient . 25 3.2.9 Temperature variability . 26 3.2.10 Theories for the thermal structure . 26 3.3 Mean state of the circulation . 26 3.3.1 Surface winds and geopotential height . 27 3.3.2 Upper-level flow . 27 3.3.3 200 hPa u (CDC) . -
Navier-Stokes Equation
,90HWHRURORJLFDO'\QDPLFV ,9 ,QWURGXFWLRQ ,9)RUFHV DQG HTXDWLRQ RI PRWLRQV ,9$WPRVSKHULFFLUFXODWLRQ IV/1 ,90HWHRURORJLFDO'\QDPLFV ,9 ,QWURGXFWLRQ ,9)RUFHV DQG HTXDWLRQ RI PRWLRQV ,9$WPRVSKHULFFLUFXODWLRQ IV/2 Dynamics: Introduction ,9,QWURGXFWLRQ y GHILQLWLRQ RI G\QDPLFDOPHWHRURORJ\ ÎUHVHDUFK RQ WKH QDWXUHDQGFDXVHRI DWPRVSKHULFPRWLRQV y WZRILHOGV ÎNLQHPDWLFV Ö VWXG\ RQQDWXUHDQG SKHQRPHQD RIDLU PRWLRQ ÎG\QDPLFV Ö VWXG\ RI FDXVHV RIDLU PRWLRQV :HZLOOPDLQO\FRQFHQWUDWH RQ WKH VHFRQG SDUW G\QDPLFV IV/3 Pressure gradient force ,9)RUFHV DQG HTXDWLRQ RI PRWLRQ K KKdv y 1HZWRQµVODZ FFm==⋅∑ i i dt y )ROORZLQJDWPRVSKHULFIRUFHVDUHLPSRUWDQW ÎSUHVVXUHJUDGLHQWIRUFH 3*) ÎJUDYLW\ IRUFH ÎIULFWLRQ Î&RULROLV IRUFH IV/4 Pressure gradient force ,93UHVVXUHJUDGLHQWIRUFH y 3UHVVXUH IRUFHDUHD y )RUFHIURPOHIW =⋅ ⋅ Fpdydzleft ∂p F=− p + dx dy ⋅ dz right ∂x ∂∂pp y VXP RI IRUFHV FFF= + =−⋅⋅⋅=−⋅ dxdydzdV pleftrightx ∂∂xx ∂∂ y )RUFHSHUXQLWPDVV −⋅pdV =−⋅1 p ∂∂ρ xdmm x ρ = m m V K 11K y *HQHUDO f=− ∇ p =− ⋅ grad p p ρ ρ mm 1RWHXQLWLV 1NJ IV/5 Pressure gradient force ,93UHVVXUHJUDGLHQWIRUFH FRQWLQXHG K 11K f=− ∇ p =− ⋅ grad p p ρ ρ mm K K ∇p y SUHVVXUHJUDGLHQWIRUFHDFWVÄGRZQKLOO³RI WKHSUHVVXUHJUDGLHQW y ZLQG IRUPHGIURPSUHVVXUHJUDGLHQWIRUFHLVFDOOHG(XOHULDQ ZLQG y WKLV W\SH RI ZLQGVDUHIRXQG ÎDW WKHHTXDWRU QR &RULROLVIRUFH ÎVPDOOVFDOH WKHUPDO FLUFXODWLRQ NP IV/6 Thermal circulation ,93UHVVXUHJUDGLHQWIRUFH FRQWLQXHG y7KHUPDOFLUFXODWLRQLVFDXVHGE\DKRUL]RQWDOWHPSHUDWXUHJUDGLHQW Î([DPSOHV RYHQ ZDUP DQG ZLQGRZ FROG RSHQILHOG ZDUP DQG IRUUHVW FROG FROGODNH DQGZDUPVKRUH XUEDQUHJLRQ -

THE EARTH's GRAVITY OUTLINE the Earth's Gravitational Field
GEOPHYSICS (08/430/0012) THE EARTH'S GRAVITY OUTLINE The Earth's gravitational field 2 Newton's law of gravitation: Fgrav = GMm=r ; Gravitational field = gravitational acceleration g; gravitational potential, equipotential surfaces. g for a non–rotating spherically symmetric Earth; Effects of rotation and ellipticity – variation with latitude, the reference ellipsoid and International Gravity Formula; Effects of elevation and topography, intervening rock, density inhomogeneities, tides. The geoid: equipotential mean–sea–level surface on which g = IGF value. Gravity surveys Measurement: gravity units, gravimeters, survey procedures; the geoid; satellite altimetry. Gravity corrections – latitude, elevation, Bouguer, terrain, drift; Interpretation of gravity anomalies: regional–residual separation; regional variations and deep (crust, mantle) structure; local variations and shallow density anomalies; Examples of Bouguer gravity anomalies. Isostasy Mechanism: level of compensation; Pratt and Airy models; mountain roots; Isostasy and free–air gravity, examples of isostatic balance and isostatic anomalies. Background reading: Fowler §5.1–5.6; Lowrie §2.2–2.6; Kearey & Vine §2.11. GEOPHYSICS (08/430/0012) THE EARTH'S GRAVITY FIELD Newton's law of gravitation is: ¯ GMm F = r2 11 2 2 1 3 2 where the Gravitational Constant G = 6:673 10− Nm kg− (kg− m s− ). ¢ The field strength of the Earth's gravitational field is defined as the gravitational force acting on unit mass. From Newton's third¯ law of mechanics, F = ma, it follows that gravitational force per unit mass = gravitational acceleration g. g is approximately 9:8m/s2 at the surface of the Earth. A related concept is gravitational potential: the gravitational potential V at a point P is the work done against gravity in ¯ P bringing unit mass from infinity to P. -

SMU PHYSICS 1303: Introduction to Mechanics
SMU PHYSICS 1303: Introduction to Mechanics Stephen Sekula1 1Southern Methodist University Dallas, TX, USA SPRING, 2019 S. Sekula (SMU) SMU — PHYS 1303 SPRING, 2019 1 Outline Conservation of Energy S. Sekula (SMU) SMU — PHYS 1303 SPRING, 2019 2 Conservation of Energy Conservation of Energy NASA, “Hipnos” by Molinos de Viento and available under Creative Commons from Flickr S. Sekula (SMU) SMU — PHYS 1303 SPRING, 2019 3 Conservation of Energy Key Ideas The key ideas that we will explore in this section of the course are as follows: I We will come to understand that energy can change forms, but is neither created from nothing nor entirely destroyed. I We will understand the mathematical description of energy conservation. I We will explore the implications of the conservation of energy. Jacques-Louis David. “Portrait of Monsieur de Lavoisier and his Wife, chemist Marie-Anne Pierrette Paulze”. Available under Creative Commons from Flickr. S. Sekula (SMU) SMU — PHYS 1303 SPRING, 2019 4 Conservation of Energy Key Ideas The key ideas that we will explore in this section of the course are as follows: I We will come to understand that energy can change forms, but is neither created from nothing nor entirely destroyed. I We will understand the mathematical description of energy conservation. I We will explore the implications of the conservation of energy. Jacques-Louis David. “Portrait of Monsieur de Lavoisier and his Wife, chemist Marie-Anne Pierrette Paulze”. Available under Creative Commons from Flickr. S. Sekula (SMU) SMU — PHYS 1303 SPRING, 2019 4 Conservation of Energy Key Ideas The key ideas that we will explore in this section of the course are as follows: I We will come to understand that energy can change forms, but is neither created from nothing nor entirely destroyed. -

Vorticity Production Through Rotation, Shear, and Baroclinicity
A&A 528, A145 (2011) Astronomy DOI: 10.1051/0004-6361/201015661 & c ESO 2011 Astrophysics Vorticity production through rotation, shear, and baroclinicity F. Del Sordo1,2 and A. Brandenburg1,2 1 Nordita, AlbaNova University Center, Roslagstullsbacken 23, SE-10691 Stockholm, Sweden e-mail: [email protected] 2 Department of Astronomy, AlbaNova University Center, Stockholm University, 10691 Stockholm, Sweden Received 31 August 2010 / Accepted 14 February 2011 ABSTRACT Context. In the absence of rotation and shear, and under the assumption of constant temperature or specific entropy, purely potential forcing by localized expansion waves is known to produce irrotational flows that have no vorticity. Aims. Here we study the production of vorticity under idealized conditions when there is rotation, shear, or baroclinicity, to address the problem of vorticity generation in the interstellar medium in a systematic fashion. Methods. We use three-dimensional periodic box numerical simulations to investigate the various effects in isolation. Results. We find that for slow rotation, vorticity production in an isothermal gas is small in the sense that the ratio of the root-mean- square values of vorticity and velocity is small compared with the wavenumber of the energy-carrying motions. For Coriolis numbers above a certain level, vorticity production saturates at a value where the aforementioned ratio becomes comparable with the wavenum- ber of the energy-carrying motions. Shear also raises the vorticity production, but no saturation is found. When the assumption of isothermality is dropped, there is significant vorticity production by the baroclinic term once the turbulence becomes supersonic. In galaxies, shear and rotation are estimated to be insufficient to produce significant amounts of vorticity, leaving therefore only the baroclinic term as the most favorable candidate. -

Sliding and Rolling: the Physics of a Rolling Ball J Hierrezuelo Secondary School I B Reyes Catdicos (Vdez- Mdaga),Spain and C Carnero University of Malaga, Spain
Sliding and rolling: the physics of a rolling ball J Hierrezuelo Secondary School I B Reyes Catdicos (Vdez- Mdaga),Spain and C Carnero University of Malaga, Spain We present an approach that provides a simple and there is an extra difficulty: most students think that it adequate procedure for introducing the concept of is not possible for a body to roll without slipping rolling friction. In addition, we discuss some unless there is a frictional force involved. In fact, aspects related to rolling motion that are the when we ask students, 'why do rolling bodies come to source of students' misconceptions. Several rest?, in most cases the answer is, 'because the didactic suggestions are given. frictional force acting on the body provides a negative acceleration decreasing the speed of the Rolling motion plays an important role in many body'. In order to gain a good understanding of familiar situations and in a number of technical rolling motion, which is bound to be useful in further applications, so this kind of motion is the subject of advanced courses. these aspects should be properly considerable attention in most introductory darified. mechanics courses in science and engineering. The outline of this article is as follows. Firstly, we However, we often find that students make errors describe the motion of a rigid sphere on a rigid when they try to interpret certain situations related horizontal plane. In this section, we compare two to this motion. situations: (1) rolling and slipping, and (2) rolling It must be recognized that a correct analysis of rolling without slipping. -

Coupling Effect of Van Der Waals, Centrifugal, and Frictional Forces On
PCCP View Article Online PAPER View Journal | View Issue Coupling effect of van der Waals, centrifugal, and frictional forces on a GHz rotation–translation Cite this: Phys. Chem. Chem. Phys., 2019, 21,359 nano-convertor† Bo Song,a Kun Cai, *ab Jiao Shi, ad Yi Min Xieb and Qinghua Qin c A nano rotation–translation convertor with a deformable rotor is presented, and the dynamic responses of the system are investigated considering the coupling among the van der Waals (vdW), centrifugal and frictional forces. When an input rotational frequency (o) is applied at one end of the rotor, the other end exhibits a translational motion, which is an output of the system and depends on both the geometry of the system and the forces applied on the deformable part (DP) of the rotor. When centrifugal force is Received 25th September 2018, stronger than vdW force, the DP deforms by accompanying the translation of the rotor. It is found that Accepted 26th November 2018 the translational displacement is stable and controllable on the condition that o is in an interval. If o DOI: 10.1039/c8cp06013d exceeds an allowable value, the rotor exhibits unstable eccentric rotation. The system may collapse with the rotor escaping from the stators due to the strong centrifugal force in eccentric rotation. In a practical rsc.li/pccp design, the interval of o can be found for a system with controllable output translation. 1 Introduction components.18–22 Hertal et al.23 investigated the significant deformation of carbon nanotubes (CNTs) by surface vdW forces With the rapid development in nanotechnology, miniaturization that were generated between the nanotube and the substrate. -
Surface Circulation2016
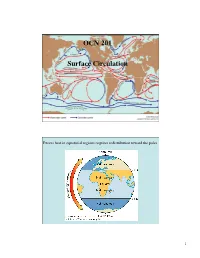
OCN 201 Surface Circulation Excess heat in equatorial regions requires redistribution toward the poles 1 In the Northern hemisphere, Coriolis force deflects movement to the right In the Southern hemisphere, Coriolis force deflects movement to the left Combination of atmospheric cells and Coriolis force yield the wind belts Wind belts drive ocean circulation 2 Surface circulation is one of the main transporters of “excess” heat from the tropics to northern latitudes Gulf Stream http://earthobservatory.nasa.gov/Newsroom/NewImages/Images/gulf_stream_modis_lrg.gif 3 How fast ( in miles per hour) do you think western boundary currents like the Gulf Stream are? A 1 B 2 C 4 D 8 E More! 4 mph = C Path of ocean currents affects agriculture and habitability of regions ~62 ˚N Mean Jan Faeroe temp 40 ˚F Islands ~61˚N Mean Jan Anchorage temp 13˚F Alaska 4 Average surface water temperature (N hemisphere winter) Surface currents are driven by winds, not thermohaline processes 5 Surface currents are shallow, in the upper few hundred metres of the ocean Clockwise gyres in North Atlantic and North Pacific Anti-clockwise gyres in South Atlantic and South Pacific How long do you think it takes for a trip around the North Pacific gyre? A 6 months B 1 year C 10 years D 20 years E 50 years D= ~ 20 years 6 Maximum in surface water salinity shows the gyres excess evaporation over precipitation results in higher surface water salinity Gyres are underneath, and driven by, the bands of Trade Winds and Westerlies 7 Which wind belt is Hawaii in? A Westerlies B Trade -

Intro to Tidal Theory
Introduction to Tidal Theory Ruth Farre (BSc. Cert. Nat. Sci.) South African Navy Hydrographic Office, Private Bag X1, Tokai, 7966 1. INTRODUCTION Tides: The periodic vertical movement of water on the Earth’s Surface (Admiralty Manual of Navigation) Tides are very often neglected or taken for granted, “they are just the sea advancing and retreating once or twice a day.” The Ancient Greeks and Romans weren’t particularly concerned with the tides at all, since in the Mediterranean they are almost imperceptible. It was this ignorance of tides that led to the loss of Caesar’s war galleys on the English shores, he failed to pull them up high enough to avoid the returning tide. In the beginning tides were explained by all sorts of legends. One ascribed the tides to the breathing cycle of a giant whale. In the late 10 th century, the Arabs had already begun to relate the timing of the tides to the cycles of the moon. However a scientific explanation for the tidal phenomenon had to wait for Sir Isaac Newton and his universal theory of gravitation which was published in 1687. He described in his “ Principia Mathematica ” how the tides arose from the gravitational attraction of the moon and the sun on the earth. He also showed why there are two tides for each lunar transit, the reason why spring and neap tides occurred, why diurnal tides are largest when the moon was furthest from the plane of the equator and why the equinoxial tides are larger in general than those at the solstices.