Theoretical Oceanography Lecture Notes Master AO-W27
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Navier-Stokes Equation
,90HWHRURORJLFDO'\QDPLFV ,9 ,QWURGXFWLRQ ,9)RUFHV DQG HTXDWLRQ RI PRWLRQV ,9$WPRVSKHULFFLUFXODWLRQ IV/1 ,90HWHRURORJLFDO'\QDPLFV ,9 ,QWURGXFWLRQ ,9)RUFHV DQG HTXDWLRQ RI PRWLRQV ,9$WPRVSKHULFFLUFXODWLRQ IV/2 Dynamics: Introduction ,9,QWURGXFWLRQ y GHILQLWLRQ RI G\QDPLFDOPHWHRURORJ\ ÎUHVHDUFK RQ WKH QDWXUHDQGFDXVHRI DWPRVSKHULFPRWLRQV y WZRILHOGV ÎNLQHPDWLFV Ö VWXG\ RQQDWXUHDQG SKHQRPHQD RIDLU PRWLRQ ÎG\QDPLFV Ö VWXG\ RI FDXVHV RIDLU PRWLRQV :HZLOOPDLQO\FRQFHQWUDWH RQ WKH VHFRQG SDUW G\QDPLFV IV/3 Pressure gradient force ,9)RUFHV DQG HTXDWLRQ RI PRWLRQ K KKdv y 1HZWRQµVODZ FFm==⋅∑ i i dt y )ROORZLQJDWPRVSKHULFIRUFHVDUHLPSRUWDQW ÎSUHVVXUHJUDGLHQWIRUFH 3*) ÎJUDYLW\ IRUFH ÎIULFWLRQ Î&RULROLV IRUFH IV/4 Pressure gradient force ,93UHVVXUHJUDGLHQWIRUFH y 3UHVVXUH IRUFHDUHD y )RUFHIURPOHIW =⋅ ⋅ Fpdydzleft ∂p F=− p + dx dy ⋅ dz right ∂x ∂∂pp y VXP RI IRUFHV FFF= + =−⋅⋅⋅=−⋅ dxdydzdV pleftrightx ∂∂xx ∂∂ y )RUFHSHUXQLWPDVV −⋅pdV =−⋅1 p ∂∂ρ xdmm x ρ = m m V K 11K y *HQHUDO f=− ∇ p =− ⋅ grad p p ρ ρ mm 1RWHXQLWLV 1NJ IV/5 Pressure gradient force ,93UHVVXUHJUDGLHQWIRUFH FRQWLQXHG K 11K f=− ∇ p =− ⋅ grad p p ρ ρ mm K K ∇p y SUHVVXUHJUDGLHQWIRUFHDFWVÄGRZQKLOO³RI WKHSUHVVXUHJUDGLHQW y ZLQG IRUPHGIURPSUHVVXUHJUDGLHQWIRUFHLVFDOOHG(XOHULDQ ZLQG y WKLV W\SH RI ZLQGVDUHIRXQG ÎDW WKHHTXDWRU QR &RULROLVIRUFH ÎVPDOOVFDOH WKHUPDO FLUFXODWLRQ NP IV/6 Thermal circulation ,93UHVVXUHJUDGLHQWIRUFH FRQWLQXHG y7KHUPDOFLUFXODWLRQLVFDXVHGE\DKRUL]RQWDOWHPSHUDWXUHJUDGLHQW Î([DPSOHV RYHQ ZDUP DQG ZLQGRZ FROG RSHQILHOG ZDUP DQG IRUUHVW FROG FROGODNH DQGZDUPVKRUH XUEDQUHJLRQ -

Vorticity Production Through Rotation, Shear, and Baroclinicity
A&A 528, A145 (2011) Astronomy DOI: 10.1051/0004-6361/201015661 & c ESO 2011 Astrophysics Vorticity production through rotation, shear, and baroclinicity F. Del Sordo1,2 and A. Brandenburg1,2 1 Nordita, AlbaNova University Center, Roslagstullsbacken 23, SE-10691 Stockholm, Sweden e-mail: [email protected] 2 Department of Astronomy, AlbaNova University Center, Stockholm University, 10691 Stockholm, Sweden Received 31 August 2010 / Accepted 14 February 2011 ABSTRACT Context. In the absence of rotation and shear, and under the assumption of constant temperature or specific entropy, purely potential forcing by localized expansion waves is known to produce irrotational flows that have no vorticity. Aims. Here we study the production of vorticity under idealized conditions when there is rotation, shear, or baroclinicity, to address the problem of vorticity generation in the interstellar medium in a systematic fashion. Methods. We use three-dimensional periodic box numerical simulations to investigate the various effects in isolation. Results. We find that for slow rotation, vorticity production in an isothermal gas is small in the sense that the ratio of the root-mean- square values of vorticity and velocity is small compared with the wavenumber of the energy-carrying motions. For Coriolis numbers above a certain level, vorticity production saturates at a value where the aforementioned ratio becomes comparable with the wavenum- ber of the energy-carrying motions. Shear also raises the vorticity production, but no saturation is found. When the assumption of isothermality is dropped, there is significant vorticity production by the baroclinic term once the turbulence becomes supersonic. In galaxies, shear and rotation are estimated to be insufficient to produce significant amounts of vorticity, leaving therefore only the baroclinic term as the most favorable candidate. -
Surface Circulation2016
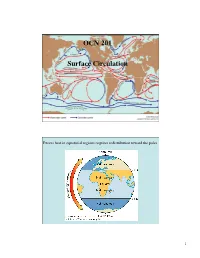
OCN 201 Surface Circulation Excess heat in equatorial regions requires redistribution toward the poles 1 In the Northern hemisphere, Coriolis force deflects movement to the right In the Southern hemisphere, Coriolis force deflects movement to the left Combination of atmospheric cells and Coriolis force yield the wind belts Wind belts drive ocean circulation 2 Surface circulation is one of the main transporters of “excess” heat from the tropics to northern latitudes Gulf Stream http://earthobservatory.nasa.gov/Newsroom/NewImages/Images/gulf_stream_modis_lrg.gif 3 How fast ( in miles per hour) do you think western boundary currents like the Gulf Stream are? A 1 B 2 C 4 D 8 E More! 4 mph = C Path of ocean currents affects agriculture and habitability of regions ~62 ˚N Mean Jan Faeroe temp 40 ˚F Islands ~61˚N Mean Jan Anchorage temp 13˚F Alaska 4 Average surface water temperature (N hemisphere winter) Surface currents are driven by winds, not thermohaline processes 5 Surface currents are shallow, in the upper few hundred metres of the ocean Clockwise gyres in North Atlantic and North Pacific Anti-clockwise gyres in South Atlantic and South Pacific How long do you think it takes for a trip around the North Pacific gyre? A 6 months B 1 year C 10 years D 20 years E 50 years D= ~ 20 years 6 Maximum in surface water salinity shows the gyres excess evaporation over precipitation results in higher surface water salinity Gyres are underneath, and driven by, the bands of Trade Winds and Westerlies 7 Which wind belt is Hawaii in? A Westerlies B Trade -

Intro to Tidal Theory
Introduction to Tidal Theory Ruth Farre (BSc. Cert. Nat. Sci.) South African Navy Hydrographic Office, Private Bag X1, Tokai, 7966 1. INTRODUCTION Tides: The periodic vertical movement of water on the Earth’s Surface (Admiralty Manual of Navigation) Tides are very often neglected or taken for granted, “they are just the sea advancing and retreating once or twice a day.” The Ancient Greeks and Romans weren’t particularly concerned with the tides at all, since in the Mediterranean they are almost imperceptible. It was this ignorance of tides that led to the loss of Caesar’s war galleys on the English shores, he failed to pull them up high enough to avoid the returning tide. In the beginning tides were explained by all sorts of legends. One ascribed the tides to the breathing cycle of a giant whale. In the late 10 th century, the Arabs had already begun to relate the timing of the tides to the cycles of the moon. However a scientific explanation for the tidal phenomenon had to wait for Sir Isaac Newton and his universal theory of gravitation which was published in 1687. He described in his “ Principia Mathematica ” how the tides arose from the gravitational attraction of the moon and the sun on the earth. He also showed why there are two tides for each lunar transit, the reason why spring and neap tides occurred, why diurnal tides are largest when the moon was furthest from the plane of the equator and why the equinoxial tides are larger in general than those at the solstices. -
Coriolis Effect
Project ATMOSPHERE This guide is one of a series produced by Project ATMOSPHERE, an initiative of the American Meteorological Society. Project ATMOSPHERE has created and trained a network of resource agents who provide nationwide leadership in precollege atmospheric environment education. To support these agents in their teacher training, Project ATMOSPHERE develops and produces teacher’s guides and other educational materials. For further information, and additional background on the American Meteorological Society’s Education Program, please contact: American Meteorological Society Education Program 1200 New York Ave., NW, Ste. 500 Washington, DC 20005-3928 www.ametsoc.org/amsedu This material is based upon work initially supported by the National Science Foundation under Grant No. TPE-9340055. Any opinions, findings, and conclusions or recommendations expressed in this publication are those of the authors and do not necessarily reflect the views of the National Science Foundation. © 2012 American Meteorological Society (Permission is hereby granted for the reproduction of materials contained in this publication for non-commercial use in schools on the condition their source is acknowledged.) 2 Foreword This guide has been prepared to introduce fundamental understandings about the guide topic. This guide is organized as follows: Introduction This is a narrative summary of background information to introduce the topic. Basic Understandings Basic understandings are statements of principles, concepts, and information. The basic understandings represent material to be mastered by the learner, and can be especially helpful in devising learning activities in writing learning objectives and test items. They are numbered so they can be keyed with activities, objectives and test items. Activities These are related investigations. -

CONTENTS: I. Sea/Land Breeze II. Pressure Gradient Force III. Angular Momentum and Coriolis Force IV
Science A-30 Section Handout 4 March 4-5, 2008 CONTENTS: I. Sea/Land Breeze II. Pressure Gradient Force III. Angular Momentum and Coriolis Force IV. Geostrophic Flow Relevant formulas and conversions: Scale Height: H = kT/(mairg ) = R'T/g -z/H Barometric Law: P(z) = P(zo)e P = ρ(k/mair)T = ρR'T m ΔP Pressure gradient force: F = × pg ρ Δx 1 day = 86400 seconds Circle: 360 degrees = 2π radians Angular velocity: ω = 2π/t Angular momentum: L = m r2 ω Coriolis force: Fc = 2 m Ω v sin(λ) Coriolis deflection: Δy = [ Ω (Δx)2 / v ] sin(λ) I. Sea/Land Breeze Onshore sea breeze Offshore land breeze Warm land, cool water Cool land, warm water During the day, land heats up faster than the sea. This makes the scale height, H larger over the land than over sea. Pressure at some altitude over land is greater than pressure over sea at same altitude, which induces flow from high pressure (land) to low pressure (sea). Now there is less mass over land than over the sea. This makes the pressure at the surface higher over the sea. At the ground, air flows from high pressure (sea) to low pressure (land). Conservation of mass completes the circulation. During nighttime, land cools off faster than the sea. The flow reverses. At the ground, air flows from inland towards the sea. 1 II. Pressure Gradient Force Pressure gradient force (Fpg) is the force due to a pressure difference (ΔP) across a horizontal distance (Δx) (directed from high pressure to low pressure). -

Lecture 4: OCEANS (Outline)
LectureLecture 44 :: OCEANSOCEANS (Outline)(Outline) Basic Structures and Dynamics Ekman transport Geostrophic currents Surface Ocean Circulation Subtropicl gyre Boundary current Deep Ocean Circulation Thermohaline conveyor belt ESS200A Prof. Jin -Yi Yu BasicBasic OceanOcean StructuresStructures Warm up by sunlight! Upper Ocean (~100 m) Shallow, warm upper layer where light is abundant and where most marine life can be found. Deep Ocean Cold, dark, deep ocean where plenty supplies of nutrients and carbon exist. ESS200A No sunlight! Prof. Jin -Yi Yu BasicBasic OceanOcean CurrentCurrent SystemsSystems Upper Ocean surface circulation Deep Ocean deep ocean circulation ESS200A (from “Is The Temperature Rising?”) Prof. Jin -Yi Yu TheThe StateState ofof OceansOceans Temperature warm on the upper ocean, cold in the deeper ocean. Salinity variations determined by evaporation, precipitation, sea-ice formation and melt, and river runoff. Density small in the upper ocean, large in the deeper ocean. ESS200A Prof. Jin -Yi Yu PotentialPotential TemperatureTemperature Potential temperature is very close to temperature in the ocean. The average temperature of the world ocean is about 3.6°C. ESS200A (from Global Physical Climatology ) Prof. Jin -Yi Yu SalinitySalinity E < P Sea-ice formation and melting E > P Salinity is the mass of dissolved salts in a kilogram of seawater. Unit: ‰ (part per thousand; per mil). The average salinity of the world ocean is 34.7‰. Four major factors that affect salinity: evaporation, precipitation, inflow of river water, and sea-ice formation and melting. (from Global Physical Climatology ) ESS200A Prof. Jin -Yi Yu Low density due to absorption of solar energy near the surface. DensityDensity Seawater is almost incompressible, so the density of seawater is always very close to 1000 kg/m 3. -

An Essay on the Coriolis Force
James F. Price Woods Hole Oceanographic Institution Woods Hole, Massachusetts, 02543 http:// www.whoi.edu/science/PO/people/jprice [email protected] Version 3.3 January 10, 2006 Summary: An Earth-attached and thus rotating reference frame is almost always used for the analysis of geophysical flows. The equation of motion transformed into a steadily rotating reference frame includes two terms that involve the rotation vector; a centrifugal term and a Coriolis term. In the special case of an Earth-attached reference frame, the centrifugal term is exactly canceled by gravitational mass attraction and drops out of the equation of motion. When we solve for the acceleration seen from an Earth-attached frame, the Coriolis term is interpreted as a force. The rotating frame perspective gives up the properties of global momentum conservation and invariance to Galilean transformation. Nevertheless, it leads to a greatly simplified analysis of geophysical flows since only the comparatively small relative velocity, i.e., winds and currents, need be considered. The Coriolis force has a simple mathematical form, 2˝ V 0M , where ˝ is Earth’s rotation vector, V 0 is the velocity observed from the rotating frame and M is the particle mass. The Coriolis force is perpendicular to the velocity and can do no work. It tends to cause a deflection of velocity, and gives rise to two important modes of motion: (1) If the Coriolis force is the only force acting on a moving particle, then the velocity vector of the particle will be continually deflected and rotate clockwise in the northern hemisphere and anticlockwise in the southern hemisphere. -
EARTH's ROTATION and Coriolis Force
Patterns of pressure and wind: from the horizontal to the vertical Mt. Washington Observatory ATMOSPHERIC PRESSURE •Weight of the air above a given area = Force (N) •p = F/A (N/m2 = Pascal, the SI unit of pressure) •Typically Measured in mb (1 mb=100 Pa) •Average Atmospheric Pressure at 0m (Sea Level) is 1013mb (29.91” Hg) •A map of sea level pressure requires adjustment of measured station pressure for sites above sea level Your book PRESSURE 100 km (Barometer measures 1013mb) PRESSURE 500mb pressure 1013mb pressure As you go up in altitude, there’s less weight (less molecules) above you… …as a result, pressure decreases with height! Pressure vs. height p = p0Exp(-z/8100) Pressure decreases exponentially with height This equation plots the red line of pressure vs. altitude Barometers: Mercury, springs, electronics can all measure atmospheric pressure precisely CAUSES OF PRESSURE VARIATIONS Universal Gas Law PV = nRT Rearrangement of this to find density (kg/m3): ρ=nM/V=MP/RT (where M=.029 kg/mol for air) Then P= ρRT/M •Number of Moles, Volume, Density, and Temperature affect the pressure of the air above us •If temperature increases and nothing else changes, either pressure or volume must increase •At high altitude, cold air results in lower pressure and vice- versa Temperature, height, and pressure • Temperatures differences are the main cause of different heights for a given pressure level SEA LEVEL PRESSURE VARIATIONS - RECORDS Lowest pressure ever recorded in the Atlantic Basin: 882 mb Hurricane Wilma, October 2005 Highest pressure -
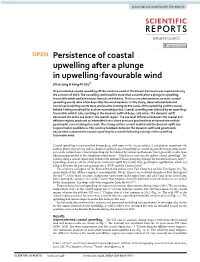
Persistence of Coastal Upwelling After a Plunge in Upwelling-Favourable
www.nature.com/scientificreports OPEN Persistence of coastal upwelling after a plunge in upwelling‑favourable wind Jihun Jung & Yang‑Ki Cho* Unprecedented coastal upwelling of the southern coast of the Korean Peninsula was reported during the summer of 2013. The upwelling continued for more than a month after a plunge in upwelling- favourable winds and had serious impacts on fsheries. This is a rare phenomenon, as most coastal upwelling events relax a few days after the wind weakens. In this study, observational data and numerical modelling results were analysed to investigate the cause of the upwelling and the reason behind it being sustained for such an extended period. Coastal upwelling was induced by an upwelling- favourable wind in July, resulting in the dynamic uplift of deep, cold water. The dynamic uplift decreased the steric sea level in the coastal region. The sea level diference between the coastal and ofshore regions produced an intensifed cross-shore pressure gradient that enhanced the surface geostrophic current along the coast. The strong surface current maintained the dynamic uplift due to geostrophic equilibrium. This positive feedback between the dynamic uplift and geostrophic adjustment sustained the coastal upwelling for a month following a plunge in the upwelling‑ favourable wind. Coastal upwelling is a process that brings deep, cold water to the ocean surface. It can play an important role both in physical processes and in chemical and biological variability in coastal regions by transporting nutri- ents to the surface layer. Coastal upwelling can be induced by various mechanisms, but it generally results from Ekman transport due to the alongshore wind stress1,2. -

Homework 6: Ocean Currents
October 2010 MAR 110 HW6 Ocean Currents 1 Homework 6: Ocean Currents 6-1. OCEAN CURRENTS Ocean currents are water motions induced by winds, tidal forces, and/or density differences with adjacent water masses. Thermohaline currents are generated by under- surface temperature- and salinity-related water mass density differences.. The major oceanic thermohaline circulation system – the so-called conveyer belt- originates with temperature-induced density increases and sinking in the North Atlantic polar regions. The deep current system distributes these cold, dense waters from the polar and subpolar regions toward the Southern Ocean polar region form where they are directed to the other ocean basins and eventual upwelling. Other smaller-scale forms of thermohaline circulation occur in marginal semi-isolated seas, where winter surface cooling and highly saline water inflows cause sinking and water mass formation; and in estuaries, where fresh river water inflows mix with saltier coastal sea water. Wind-driven currents are horizontal motions in the upper layer of the ocean that are primarily driven by the winds and tidal forces. The global winds drive surface current gyres in the major ocean basins. Both thermohaline and wind-driven currents are affected by Earth rotation in ways considered next. 6-2. CORIOLIS EFFECT The Coriolis Effect as it relates to the Earth refers to the deflection of an object from a straight path as observed by an observer on the Earth (or Earth observer). The Earth rotates counterclockwise (CCW) (see Figure 6-1) as viewed by an observer on a point above the North Pole – say the North Star. -
Effects of the Earth's Rotation
Effects of the Earth’s Rotation C. Chen General Physical Oceanography MAR 555 School for Marine Sciences and Technology Umass-Dartmouth 1 One of the most important physical processes controlling the temporal and spatial variations of biological variables (nutrients, phytoplankton, zooplankton, etc) is the oceanic circulation. Since the circulation exists on the earth, it must be affected by the earth’s rotation. Question: How is the oceanic circulation affected by the earth’s rotation? The Coriolis force! Question: What is the Coriolis force? How is it defined? What is the difference between centrifugal and Coriolis forces? 2 Definition: • The Coriolis force is an apparent force that occurs when the fluid moves on a rotating frame. • The centrifugal force is an apparent force when an object is on a rotation frame. Based on these definitions, we learn that • The centrifugal force can occur when an object is at rest on a rotating frame; •The Coriolis force occurs only when an object is moving relative to the rotating frame. 3 Centrifugal Force Consider a ball of mass m attached to a string spinning around a circle of radius r at a constant angular velocity ω. r ω ω Conditions: 1) The speed of the ball is constant, but its direction is continuously changing; 2) The string acts like a force to pull the ball toward the axis of rotation. 4 Let us assume that the velocity of the ball: V at t V + !V " V = !V V + !V at t + !t ! V = V!" ! V !" d V d" d" r = V , limit !t # 0, = V = V ($ ) !t !t dt dt dt r !V "! V d" V = % r, and = %, dt V Therefore, d V "! = $& 2r dt ω r To keep the ball on the circle track, there must exist an additional force, which has the same magnitude as the centripetal acceleration but in an opposite direction.