Combine Harvester Header Height Control Via Robust Feedback Linearization
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

List of 1% Top Students of Ii Puc March 2014 Exam In
LIST OF 1% TOP STUDENTS OF II PUC MARCH 2014 EXAM IN KARNATAKA STATE TOTAL OBTAINED PERCENTAGE SLNO CANDIDATE NAME REG_NO FATHER / MOTHER NAME MARK MARK % 1 PRIYATHOSH LOKESH K 424227 LOKESH K 600 594 99.00 2 VENKATESH KAMATH G 492313 SURESH KAMATH G 600 594 99.00 3 VASUDHA D 323630 DINESH G 600 594 99.00 4 SUJAY UMESH BANI 484423 UMESH 600 593 98.83 5 PALLAVI RAO K 486455 MANJUNATH RAO K 600 593 98.83 6 POOJA BALIGA B 491777 B RADHAKRISHNA BALIGA 600 593 98.83 7 SHRIGOURI SHRIPADA HEGDE 505026 SHRIPADA HEGDE 600 593 98.83 8 NAVYASHREE E 503899 EKANTHAPPA H 600 592 98.67 9 CHANDANA H M 940127 H M PRAKASH 600 592 98.67 10 HUDEDAGADDI ANKITA MAHANTESH 511452 HUDEDAGADDI MAHANTESH 600 592 98.67 11 ABHAY KESHAVA BHAT A 480038 JAI KRISHNA A K BHAT 600 591 98.50 12 MAHIMA KHANDIGE 482310 RADHAKRISHNA KHANDIGE 600 591 98.50 13 APOORVA 491102 SHREEDHARA KALKUR N 600 591 98.50 14 SRINIVAS R BHAT 484419 RAMAKRISHNA A BHAT 600 591 98.50 15 BHAVANA B M 502678 THIPPESWAMY B M 600 591 98.50 16 SAMANVITA SASTRY 691825 VASANTH SASTRY 600 591 98.50 17 SRINIDHI PRABHU 758834 SHASHIDHAR ATTUR 600 590 98.33 18 NAVYA R S 687364 RATHNAKARA SHETTY 600 590 98.33 19 PUNEETH KUMAR JAIN 719720 DHANRAJ JAIN 600 590 98.33 20 SRIDEVI BHAT 511832 MADHUSOODANA BHAT S 600 590 98.33 21 RAVINDRA L PATIL 682953 PATIL L B 600 590 98.33 22 DEEPIKA KARJIGI 940164 DR BASAVARAJ K 600 590 98.33 23 SOURABH A S 473367 SUNIL A G 600 590 98.33 24 HASTHA R AITHAL 483810 RAVINDRANATHA AITHAL 600 590 98.33 25 SUHAG B S 505254 SANTHOSHKUMAR SHETTY 600 590 98.33 26 MAHABALESHWAR R BHAT -

ACRS Student Allotment List
SASTRA Deemed University, Thanjavur - 613 401 ACRS Allotment List(Odd Sem.)2019-20 Course: BCSOCS008-VIRTUAL REALITY Shri Bharathy C Sl.No Register No Student Name Sem. Program 1 120004215 Shwetha Bhat T 7 B.Tech.-Electronics & Communication Engineering 2 120005037 Ganta Surya Bhagavan 7 B.Tech.-Electrical & Electronics Engineering 3 120005082 Malisetti Gayathri 7 B.Tech.-Electrical & Electronics Engineering 4 120005115 Prasanna Kumar R 7 B.Tech.-Electrical & Electronics Engineering 5 120009078 Guru Dinesh G 7 B.Tech.-Mechanical Engineering 6 120009138 Mattom Mokshagna 7 B.Tech.-Mechanical Engineering 7 120009159 Padala Bharath Reddy 7 B.Tech.-Mechanical Engineering 8 120012016 Ganesula Venkata Sai Kumar 7 B.Tech.-Mechatronics 9 120012023 Kanna Ajay Kumar 7 B.Tech.-Mechatronics 10 120015020 Chinigepalli Sai Swetha 7 B.Tech.-Information Technology 11 120015092 Sirigineedi Jaya Sravani 7 B.Tech.-Information Technology 12 121003019 Allam Vachaspati 5 B.Tech.-Computer Science & Engineering 13 121003029 Aravind Srinivasan 5 B.Tech.-Computer Science & Engineering 14 121003079 Dindukurthi Pravallika 5 B.Tech.-Computer Science & Engineering 15 121003110 Harshitha R D 5 B.Tech.-Computer Science & Engineering 16 121003137 Karangula Jaswanth 5 B.Tech.-Computer Science & Engineering 17 121003157 Lokesh S 5 B.Tech.-Computer Science & Engineering 18 121003168 Manne Sree Charan 5 B.Tech.-Computer Science & Engineering 19 121003198 Polepalli Avinash 5 B.Tech.-Computer Science & Engineering 20 121003209 Pravin K K 5 B.Tech.-Computer Science & Engineering -

Iv Copyright by Eriko Kobayashi 2003
Copyright By Eriko Kobayashi 2003 iv The Dissertation Committee for Eriko Kobayashi certifies that this is the approved version of the following dissertation: Hindustani Classical Music Reform Movement and the Writing of History, 1900s to 1940s Committee: Stephen Slawek, Supervisor Gerard Behague James Brow Veit Erlmann Gail Minault v Hindustani Classical Music Reform Movement and the Writing of History, 1900s to 1940s by Eriko Kobayashi, M.A., B.F.A. Dissertation Presented to the Faculty of the Graduate School of the University of Texas at Austin in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy The University of Texas at Austin May 2003 vi Acknowledgments Many people contributed to this dissertation, and it would not have been possible to write it without the assistance I received from them. I am grateful to all the musicians who agreed to talk to me and helped me during my stay in India in 1997-1998, without any reward on their part. In Delhi, I would like to thank Drs. Shanno Khurana and Sumati Mutatkar, whose articulateness and sober intelligence impressed me very much. In Mumbai, Mr. Ramdas Bhatkal gave me a warm reception and facilitated my meetings with Pt. S.C.R. Bhat, whose wonderful narratives are prominently featured in the dissertation. In Miraj, Mr. Sudhir Pote made my stay easy and enjoyable, and Mr. Balwant Joshi offered me valuable information both about his father and the Gandharva Mahavidyalayas. Ms. Uma Swami prepared copies of original documents for me and took me around in the town. The entire office of A.B.G.M.V. -
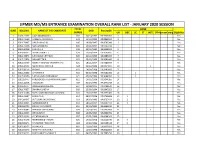
Jipmer Md/Ms Entrance Examination Overall Rank List - January 2020 Session Total Rank Slno Roll No
JIPMER MD/MS ENTRANCE EXAMINATION OVERALL RANK LIST - JANUARY 2020 SESSION TOTAL RANK SLNO ROLL NO. NAME OF THE CANDIDATE DOB Percentile MARKS UR OBC SC ST INST OPHSponsoredForeignEligibility 1 2001122317 AJAY NARAYAN M S 692 30/10/1995 99.9931783 1 Yes 2 2001171139 VAIBHAV AGGARWAL 648 11/12/1995 99.9863565 2 Yes 3 2001171907 VASUDHA KOHLI 646 19/08/1995 99.9795348 3 Yes 4 2001172538 RAHUL MIDDHA 639 14/11/1994 99.9727130 4 Yes 5 2001140268 SANJANA S 633 26/10/1995 99.9658913 5 Yes 6 2001141655 PREM VENKATT T 629 13/09/1994 99.9590695 6 Yes 7 2001142873 S.PRASANNA ETHIRAJ 625 20/10/1995 99.9386043 7 Yes 8 2001121854 NAVANEETH B 625 29/02/1996 99.9386043 8 Yes 9 2001191433 MOHITH GEORGE VARAMPATHU 625 18/11/1994 99.9386043 9 Yes 10 2001140132 NAVEEDH AHMED A R 624 09/04/1996 99.9317825 10 1 Yes 11 2001190174 AKSHAY 623 14/04/1996 99.9249608 11 Yes 12 2001120636 CHAITHRA R 622 03/02/1996 99.9181390 12 1 Yes 13 2001142386 S M MOHANA SUNDARAM 621 05/09/1994 99.9044955 13 2 Yes 14 2001201477 YARLAGADDA YASHWANTH KUMAR 621 14/02/1996 99.9044955 14 Yes 15 2001144338 G.MAHATHI 619 01/06/1996 99.8976738 15 Yes 16 2001120437 DANESHWARI KALAGE 617 11/08/1995 99.8908520 16 Yes 17 2001170637 SWARNA SAXENA 616 25/09/1994 99.8840303 17 Yes 18 2001110288 PATEL MARGIKKUMAR LALLUBHAI 615 15/02/1995 99.8772085 18 Yes 19 2001143057 SARANYA.N 614 08/07/1996 99.8703868 19 1 Yes 20 2001200017 VUTUKURI SAI SASHANK 613 29/03/1996 99.8567433 20 2 Yes 21 2001140035 SARANKUMAR B 613 18/12/1994 99.8567433 21 3 Yes 22 2001190725 JOHN V ALEXANDER 611 22/10/1992 99.8499215 -

INDIAN COUNCIL for CULTURAL RELATIONS GENRE WISE LIST of ICCR EMPANELLED ARTISTS I N D E X S.No
INDIAN COUNCIL FOR CULTURAL RELATIONS GENRE WISE LIST OF ICCR EMPANELLED ARTISTS I N D E X S.No. Genre Number of Artists 1 Classical Dance (As updated on 06 September 2021) Bharatanatyam 94 Chhau 13 Kathak 108 Kathakali 12 Kuchipudi 17 Koodiyattam 4 Manipuri 29 Mohiniattam 14 Odissi 104 Sattriya 10 Yakshagana 2 407 2 Folk 281 3 Theatre & Puppetry 62 4 Carnatic Music Clarionet 1 Carnatic Devotional 3 Carnatic Flute 8 Those who did not respond despite several reminders are requested to write to us on email: [email protected] Carnatic Fusion 1 Carnatic Ghatam 1 Gudiyattam 1 Carnatic Jaltarang 1 Carnatic Keyboard 1 Carnatic Mandolin 2 Mridangam 7 Nadaswaram 1 Panchvadyan 2 Percussion 1 Talavadiya & Konakol 1 Carnatic Tavil 1 Carnatic Veena 4 Carnatic Violin 9 Carnatic Instrumental 2 Music Group Carnatic Vocal 11 58 5 Hindustani Music Clarionet 1 Hindustani Flute 17 Hindustani Guitar 5 Jaltarang 1 Pakhawaj 5 Sreekhole 2 Rudra Veena 1 Santoor 9 Sarangi 2 Sarod 22 Shehnai 5 Sitar 46 Surbahar 1 Sundari Wadan 1 Synthsizer 1 Tabla 47 Harmonica Mouth Organ 1 Vichitra Veena 1 Hindustani Violin 10 Hindustani Vocal 107 Hindustani Vocal Lec 2 Dem 287 6 Modern Dance & Music Light Music 61 Qawwali 21 Devotional 28 Rabindra Sangeet 11 Nazrul Geet 1 Popular Music 4 Bollywood 17 Rock Band 5 Fusion Music 27 Percussion 1 Hindustani Instrumental 5 Jugalbandi 1 Jazz 6 Orchestra 2 Choir 4 Opera 2 Piano 3 Modern Dance 29 Contemporary Western Pop Music 1 Choreographer 4 233 Total 1328 INDIAN COUNCIL FOR CULTURAL RELATIONS GENRE-WISE LIST OF EMPANELLED ARTISTS S. -

Student List
Forming Part & Parcel of Policy No :4015/X/155047717/02/000 Name Of Insured: TEZPUR UNIVERSITY Details of Sum Insured as given Below : Details of Addition SR STUDENT ID STUDENT NAME NO 1 BBI16001 MAHASWETA GOSWAMI 2 BBI16002 PRATITI GOSWAMI 3 BBI16016 BIPASHA CHOUDHURY 4 BBI16017 CHAINEE DAS 5 BBI16020 SAPTARSHIJYOTI GOGOI 6 BBI16015 NALINI DAIMARY 7 BBI16011 PRANAB JYOTI DEORI 8 BBI17007 RAINA ROY 9 BBI17008 BAISHALI TAMULI 10 BBI17010 CHAYANIKA CHETIA 11 BBI17011 BAISAKHI PAUL 12 BBI17002 SHRISTI PHUKAN 13 BBI17015 ANINDITA NEOG 14 BBI17014 HRISHIKESH BHARALI 15 BBI17001 RIA KASHYAP 16 BBI17013 JYOTISHPAL DEKA 17 BBI17016 JUGAMI BRAHMA 18 CHI16009 SILPISIKHA BORAH 19 CHI16010 DIBYANGANA SARMAH 20 CHI16011 TONMOY JYOTI BORA 21 CHI16012 ARIF HASSAN BIMAN 22 CHI16002 ABHIJIT SAIKIA 23 CHI16015 DIPANKAR BARMAN 24 CHI16019 PADMA LOCHAN BORA 25 CHI16016 ARPITA DAS 26 CHI16018 SANGHAMITRA DAS 27 CHI17011 GARGI SHARMA 28 CHI17007 SHIRSA MAZUMDER 29 CHI17008 KHANINDRA TALUKDAR 30 CHI17009 NISHANKA KALITA 31 CHI17010 RITUKALPA SAIKIA 32 CHI17012 MRIDUPAVAN DUTTA 33 CHI17013 MD MUSTAQUE ANSARI 34 CHI17014 AFREEN HUSSAIN 35 CHI17017 KAWSHIK FAMBO 36 CHI17015 LALIT RANJAN SAHU 37 CHI17016 ABHIJIT DAS 38 CHI18013 ANUBHUTI DEKA 39 CHI18010 TRINITA SINGHA ROY 40 CHI18014 ABHILEKHA PHUKAN 41 CHI18001 ANUBHAB KASHYAP 42 CHI18002 KRISHNA DEV 43 CHI18003 PRIYANUJ KANDALI 44 CHI18004 NIHAL KHATIWODA 45 CHI18008 ARIF FAISAL AHMED 46 CHI18009 PRADYUT ACHARJEE 47 CHI18012 RAJDEEP KAKOTY 48 CHI18015 ADITI SHAW 49 CHI18021 KARISHMA CHETRY 50 CHI18005 KOUSTUV -

GENRE WISE LIST of ICCR EMPANELLED ARTISTS 1327.Pdf
INDIAN COUNCIL FOR CULTURAL RELATIONS GENRE WISE LIST OF ICCR EMPANELLED ARTISTS I N D E X S.No. Genre Number of Artists 1 Classical Dance (As updated on 11 August 2021) Bharatanatyam 94 Chhau 13 Kathak 108 Kathakali 12 Kuchipudi 17 Koodiyattam 4 Manipuri 29 Mohiniattam 14 Odissi 104 Sattriya 10 Yakshagana 2 407 2 Folk 281 3 Theatre & Puppetry 62 4 Carnatic Music Clarionet 1 Carnatic Devotional 3 Carnatic Flute 8 Those who did not respond despite several reminders are requested to write to us on email: [email protected] Carnatic Fusion 1 Carnatic Ghatam 1 Gudiyattam 1 Carnatic Jaltarang 1 Carnatic Keyboard 1 Carnatic Mandolin 2 Mridangam 7 Nadaswaram 1 Panchvadyan 2 Percussion 1 Talavadiya & Konakol 1 Carnatic Tavil 1 Carnatic Veena 4 Carnatic Violin 9 Carnatic Instrumental 2 Music Group Carnatic Vocal 11 58 5 Hindustani Music Clarionet 1 Hindustani Flute 17 Hindustani Guitar 4 Jaltarang 1 Pakhawaj 5 Sreekhole 2 Rudra Veena 1 Santoor 9 Sarangi 2 Sarod 22 Shehnai 5 Sitar 46 Surbahar 1 Sundari Wadan 1 Synthsizer 1 Tabla 47 Harmonica Mouth Organ 1 Vichitra Veena 1 Hindustani Violin 10 Hindustani Vocal 107 Hindustani Vocal Lec 2 Dem 286 6 Modern Dance & Music Light Music 61 Qawwali 21 Devotional 28 Rabindra Sangeet 11 Nazrul Geet 1 Popular Music 4 Bollywood 17 Rock Band 5 Fusion Music 27 Percussion 1 Hindustani Instrumental 5 Jugalbandi 1 Jazz 6 Orchestra 2 Choir 4 Opera 2 Piano 3 Modern Dance 29 Contemporary Western Pop Music 1 Choreographer 4 233 Total 1327 INDIAN COUNCIL FOR CULTURAL RELATIONS GENRE-WISE LIST OF EMPANELLED ARTISTS S. -
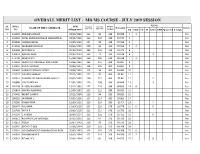
OVERALL MERIT LIST - MD MS COURSE - JULY 2019 SESSION RANK SL ROLL DOB CORRECT NEGATIVE TOTAL NAME of the CANDIDATE Percentile Eligibility NO NO
OVERALL MERIT LIST - MD MS COURSE - JULY 2019 SESSION RANK SL ROLL DOB CORRECT NEGATIVE TOTAL NAME OF THE CANDIDATE Percentile Eligibility NO NO. (dd/mm/yyyy) RESPONSE RESPONSE MARKS UR OBC SC ST INST OPH Sponsored Foreign 1 140200 PRAVEEN KUMAR 04/10/1994 134 92 444 99.988 1 1 Yes 2 110093 PATEL DARSHANKUMAR JASHVANTLAL 04/11/1995 136 104 440 99.977 2 Yes 3 201098 VOJJALA NIKHIL 22/09/1995 134 98 438 99.965 3 Yes 4 142293 MOHAMED ILIYAS R 18/03/1992 128 82 430 99.953 4 2 Yes 5 120368 BHAVESH M 29/10/1995 135 115 425 99.942 5 Yes 6 120311 SHIVAM GOEL 01/12/1994 122 74 414 99.918 6 1 Yes 7 171739 MANAV M S 15/08/1994 130 106 414 99.918 7 3 Yes 8 170591 HEMANTH AMARDEEP SANTHOOR 12/06/1995 131 115 409 99.907 8 Yes 9 170005 KUNAL SHARMA 29/04/1995 128 109 403 99.895 9 Yes 10 200687 VARIKUTI SRINADH REDDY 24/04/1995 124 94 402 99.883 10 Yes 11 171202 GAURAV SARNAIK 02/11/1995 123 92 400 99.86 11 Yes 12 160016 EVANGELINE MARY KIRUBA SAMUEL 18/05/1996 128 112 400 99.86 12 2 Yes 13 140080 J SUDHARSHAN 12/01/1996 126 108 396 99.848 13 3 Yes 14 181149 B. MITHIN KUMAR 13/12/1995 127 114 394 99.836 14 4 Yes 15 150804 SHIVAM AGARWAL 12/09/1995 125 112 388 99.825 15 Yes 16 170442 MOHIT GANDHI 23/12/1994 120 94 386 99.813 16 Yes 17 180382 JAYARAM. -

Commencement May2021 Progr
CLASS OF COMMENCEMENT MAY 15, 2021 II The pandemic did not diminish your years of hard work, nor did it define who you will become. In fact, it has brought into sharp focus the remarkable humans you already are. Your ability to reach this day — GRADUATING FROM THE UNIVERSITY OF CALIFORNIA, BERKELEY — is nothing short of heroic. Congratulations, CLASS OF 2021. PROGRAM WELCOME AND LAND ACKNOWLEDGEMENT ALFRED DAY ASSOCIATE DEAN OF STUDENTS AND DIRECTOR CENTER FOR SUPPORT AND INTERVENTION NATIONAL ANTHEM JAE JOON (JOSEPH) SHIN ’21 INTRODUCTION OF CHANCELLOR T. CHRIST NIKITA DHAR ’21 VICE PRESIDENT, SENIOR CLASS COUNCIL WELCOME REMARKS AND AWARD PRESENTATION CAROL T. CHRIST CHANCELLOR THE UNIVERSITY MEDALIST LEYLA KABULI ’21 STUDENT PERFORMANCE OWEN FARMER ’21 GUINNESS WORLD RECORD UNICYCLIST CLASS OF 2021 SENIOR GIFT PRESENTATION DOUGLAS WICKHAM ’21 PRESIDENT, CAL STUDENT PHILANTHROPY ERIC MANZO ’21 VICE PRESIDENT OF MEMBERSHIP, CAL STUDENT PHILANTHROPY INTRODUCTION OF KEYNOTE SPEAKER MEGAN WIENER ’21 PRESIDENT, SENIOR CLASS COUNCIL KEYNOTE SPEAKER ADEWALE “WALLY” ADEYEMO ’04 DEPUTY SECRETARY OF THE TREASURY STUDENT PERFORMANCE BARETROUPE CONFERRING OF DEGREES CAROL T. CHRIST CHANCELLOR HAIL TO CALIFORNIA DECADENCE A CAPPELLA 2 KEYNOTE SPEAKER ADEWALE “WALLY” ADEYEMO ’04 Wally Adeyemo, the Deputy Secretary of the Treasury, has spent most of his career in public service, convening governments, companies, and organizations to achieve common goals. Adeyemo came to the Treasury Department from the Obama Foundation, where he served as president beginning in August 2019. Before that he was a senior advisor at the Center for Strategic and International Studies and at Blackrock and held several public service roles. -

Component-I (A) – Personal Details
Component-I (A) – Personal details: Prof. P. Bhaskar Reddy Sri Venkateswara University, Tirupati. Prof. R Thiagarajan Presidency College, Chennai. Prof. Suneera Kasliwal Vyas Delhi University, New Delhi. Prof. Anjali Mittal Delhi University, New Delhi. 1 Component-I (B) – Description of module: Subject Name Indian Culture Paper Name Indian Aesthetics and Fine Arts Module Name/Title Vocalists and Scholars of North India-1 Module Id I C / IAFA / 28 Pre requisites An interest to know about the famous musicians who were expert vocalists and scholars of North Indian Classical Music. Objectives To draw a short biographical sketch and achievements of some eminent vocalists and scholars of North Indian Classical Music who were monumental in bringing the glory of hindustani classical music art to the world through their performances. Keywords Alladiya Khan, Vishnu Narayan Bhatkhande, Vishnu Digambar Paluskar, Abdul Karim Khan, Mushtaq Hussain Khan, Faiyaz Hussain Khan, Aman Ali Khan, Kesarbai Kerkar, Krishnarao Shankar , Thakur Jaidev Singh, Vilayat Hussain Khan, Omkarnath Thakur, Vinayak Rao Patwardhan, Srikrishna Narayan Ratanjankar, Prof.B.R.Deodhar. E-text (Quadrant-I) : Introduction In this module, let us get familiar with some of the greatest vocalists and scholars who lived in the past years. The biographical details, tutelage and achievements of some the vocalists and scholars have been provided. This list is not exhaustive and is presented in a chronological manner. Alladiya Khan (1855 - 1946) Born in 1855, Rajasthan, Alladiya Khan was a great vocalist and was known as “Gaan Samrath”. He was the founder of the Jaipur - Atrauli gharana. He was taught dhrupad and khayal forms of singing by his uncle, Jehangir Khan. -

Appln No. Course Candidate Name Category Religious Indian/NRI NBE Reg.No All India Rank Father Name HK/Non HK Lingustic PH PGET No
KARNATAKA EXAMINATIONS AUTHORITY 1 / 151 Sampige Road,18th Cross,Malleshwaram, Bangalore - 560012 PGET 2019 Provisional Verified List Appln No. Course Candidate Name Category Religious Indian/NRI NBE Reg.No All India Rank Father Name HK/Non HK Lingustic PH PGET No. NBE Score NIS / IS Clause NRI Ward St John ------------------------------------------------------------------------------------------------------------------------------------------ 204077 Medical DEVASHISH MISHRA General Merit No Indian 1966009582 849 VINAY MISHRA No No - M006E 820 Non - In Service a - Clause No ------------------------------------------------------------------------------------------------------------------------------------------- 206531 Medical ADARI APPALA KARTHIK General Merit No Indian 1966045404 2840 ADARI VENKATA NAGESWAR No No - RAO M0194 753 Non - In Service y - Clause No ------------------------------------------------------------------------------------------------------------------------------------------- 203832 Medical R SNEHA Category-3A No Indian 1966012545 3232 RAJANNA A No No - M01CC 745 Non - In Service b - Clause No ------------------------------------------------------------------------------------------------------------------------------------------- 208716 Medical PRIYANKA KUMARI General Merit No Indian 1966106242 3274 RAM NIWAS SHARMA No No - M01D3 744 Non - In Service a - Clause No ------------------------------------------------------------------------------------------------------------------------------------------- 209239 Medical -
Convocation Brochure
SOLAR PRESSÈ9839030542 Board of Governors Prof. P. K. Panigrahi Mechanical Engineering Prof. M. Anandakrishnan Prof. Sandeep Verma Chairman Chemistry Prof. Sobha Madan Mathematics & Statistics Prof. G. C. Tripathi Prof. D. Chowdhary Prof. J. K Bhattacharjee Physics Prof. P. Balaram Prof. Rajiv Sinha Shri Krishnamurthi Venkataramanan Earth Sciences Prof. Onkar Singh Prof. Surajit Sinha Prof. Deepak Gupta Humanities & Social Sciences Prof. Achala M. Raina Prof. Indranil Manna Heads of Inter-Disciplinary Programmes Key Institute Administrators Prof. Purnendu Bose Environmental Engineering & Management Prof. Indranil Manna Prof. Asima Pradhan Director & Chairman, Senate Photonics Science and Engineering Prof. A.K. Chaturvedi Prof. Satyaki Roy Deputy Director Design Prof. Manindra Agarwal Prof. Y. N. Mohapatra Dean, Faculty Affairs Materials Science Prof. Amalendu Chandra Prof. P. K. Panigrahi Dean, Research & Development Nuclear Engineering & Technology Prof. B.V. Phani Dean, Resources & Alumni Chairpersons & Conveners of Standing Prof. Neeraj Misra Committees of Senate Dean, Academic Affairs Prof. A.R. Harish Dean, Students' Affairs Prof. Ajai Jain Prof. Onkar Dikshit Chairman, Senate Post-Graduate Committee Dean, Infrastructure and Planning Prof. D. P. Mishra EXHORTATION Prof. N. N. Kishore Chairman, Senate Under-Graduate Committee Professor-in-Charge (Admin.) Prof. Kallol Mondal Chairman, Senate Scholarships & Prizes Committee Remember that your knowledge and intellectual Heads of Departments Prof. Indranil Manna attainment is the most sacred wealth of the nation. You Chairman, Senate Honorary Degree Committee shall therefore, use it in a manner befitting the honour Prof. R. Gurunath Prof. Sanjay Mittal Chairman, Senate Library Committee and dignity of your country and of your alma mater. You Aerospace Engineering Prof. A. R. Harish shall make every effort, in all circumstances, to uphold Prof.