NWC SAF Convective Precipitation Product from MSG: a New Day-Time Method Based on Cloud Top Physical Properties
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Observing the Universe
ObservingObserving thethe UniverseUniverse :: aa TravelTravel ThroughThrough SpaceSpace andand TimeTime Enrico Flamini Agenzia Spaziale Italiana Tokyo 2009 When you rise your head to the night sky, what your eyes are observing may be astonishing. However it is only a small portion of the electromagnetic spectrum of the Universe: the visible . But any electromagnetic signal, indipendently from its frequency, travels at the speed of light. When we observe a star or a galaxy we see the photons produced at the moment of their production, their travel could have been incredibly long: it may be lasted millions or billions of years. Looking at the sky at frequencies much higher then visible, like in the X-ray or gamma-ray energy range, we can observe the so called “violent sky” where extremely energetic fenoena occurs.like Pulsar, quasars, AGN, Supernova CosmicCosmic RaysRays:: messengersmessengers fromfrom thethe extremeextreme universeuniverse We cannot see the deep universe at E > few TeV, since photons are attenuated through →e± on the CMB + IR backgrounds. But using cosmic rays we should be able to ‘see’ up to ~ 6 x 1010 GeV before they get attenuated by other interaction. Sources Sources → Primordial origin Primordial 7 Redshift z = 0 (t = 13.7 Gyr = now ! ) Going to a frequency lower then the visible light, and cooling down the instrument nearby absolute zero, it’s possible to observe signals produced millions or billions of years ago: we may travel near the instant of the formation of our universe: 13.7 By. Redshift z = 1.4 (t = 4.7 Gyr) Credits A. Cimatti Univ. Bologna Redshift z = 5.7 (t = 1 Gyr) Credits A. -
Rev 214 SOST Segment Titan Rainclouds 2015-100T20:13:00-102T20:13:00 Rhea No Targeted Flybys; Highlights
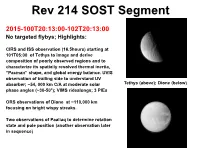
Rev 214 SOST Segment Titan rainclouds 2015-100T20:13:00-102T20:13:00 Rhea No targeted flybys; Highlights: CIRS and ISS observation (16.5hours) starting at 101T05:00 of Tethys to image and derive composition of poorly observed regions and to characterize its spatially resolved thermal inertia, “Pacman” shape, and global energy balance. UVIS observation of trailing side to understand UV absorber; ~54, 000 km C/A at moderate solar Tethys (above); Dione (below) phase angles (~30-50°); VIMS ridealongs; 3 PIEs ORS observations of Dione at ~110,000 km focusing on bright wispy streaks. CIRS PDT Design Two observations of Paaliaq to determine rotation state and pole position (another observation later in sequence) Helene The Tethys observations will focus on the above area. Iapetus observing campaign (No PIES) Rhea On rev 213-214 (XD Segment) there are five distant (~1 million km) ORS Iapetus observations designed to cover regions that are poorly imaged. The solar phase angle is ~40 degrees throughout the observing period, which is ideal for mapping geologic features. Composition and thermal properties will also be studied. Tethys The observations extend from 2015- 085T21:52-091T20:17 and cover the N. trailing (bright) hemisphere. ISS is CIRS PDT Design prime except for one observation, which is CIRS prime. Iapetus is about 240 ISS pixels at 6 VIMS (hi-res) pixels. Iapetus Helene This part of the campaign will focus on the above area. Plume Observation in S88 (not a PIE) XD_214_215 Rhea ISS_214EN_PLMHPMR001_PRIME 2015-103T23:10-104T09:00 VIMS and UVIS in ridealong; pointing requirements (must point within 15 ° of Saturn center ; added to spreadsheet) Science Goals:recap To obtain different viewing geometries which better characterize plume morphology, Tethys particle size, and the relationship between plumes and surface features and thermal anomalies. -

Accretion of Saturn's Mid-Sized Moons During the Viscous
Accretion of Saturn’s mid-sized moons during the viscous spreading of young massive rings: solving the paradox of silicate-poor rings versus silicate-rich moons. Sébastien CHARNOZ *,1 Aurélien CRIDA 2 Julie C. CASTILLO-ROGEZ 3 Valery LAINEY 4 Luke DONES 5 Özgür KARATEKIN 6 Gabriel TOBIE 7 Stephane MATHIS 1 Christophe LE PONCIN-LAFITTE 8 Julien SALMON 5,1 (1) Laboratoire AIM, UMR 7158, Université Paris Diderot /CEA IRFU /CNRS, Centre de l’Orme les Merisiers, 91191, Gif sur Yvette Cedex France (2) Université de Nice Sophia-antipolis / C.N.R.S. / Observatoire de la Côte d'Azur Laboratoire Cassiopée UMR6202, BP4229, 06304 NICE cedex 4, France (3) Jet Propulsion Laboratory, California Institute of Technology, M/S 79-24, 4800 Oak Drive Pasadena, CA 91109 USA (4) IMCCE, Observatoire de Paris, UMR 8028 CNRS / UPMC, 77 Av. Denfert-Rochereau, 75014, Paris, France (5) Department of Space Studies, Southwest Research Institute, Boulder, Colorado 80302, USA (6) Royal Observatory of Belgium, Avenue Circulaire 3, 1180 Uccle, Bruxelles, Belgium (7) Université de Nantes, UFR des Sciences et des Techniques, Laboratoire de Planétologie et Géodynamique, 2 rue de la Houssinière, B.P. 92208, 44322 Nantes Cedex 3, France (8) SyRTE, Observatoire de Paris, UMR 8630 du CNRS, 77 Av. Denfert-Rochereau, 75014, Paris, France (*) To whom correspondence should be addressed ([email protected]) 1 ABSTRACT The origin of Saturn’s inner mid-sized moons (Mimas, Enceladus, Tethys, Dione and Rhea) and Saturn’s rings is debated. Charnoz et al. (2010) introduced the idea that the smallest inner moons could form from the spreading of the rings’ edge while Salmon et al. -

Rings and Moons of Saturn 1 Rings and Moons of Saturn
PYTS/ASTR 206 – Rings and Moons of Saturn 1 Rings and Moons of Saturn PTYS/ASTR 206 – The Golden Age of Planetary Exploration Shane Byrne – [email protected] PYTS/ASTR 206 – Rings and Moons of Saturn 2 In this lecture… Rings Discovery What they are How to form rings The Roche limit Dynamics Voyager II – 1981 Gaps and resonances Shepherd moons Voyager I – 1980 – Titan Inner moons Tectonics and craters Cassini – ongoing Enceladus – a very special case Outer Moons Captured Phoebe Iapetus and Hyperion Spray-painted with Phoebe debris PYTS/ASTR 206 – Rings and Moons of Saturn 3 We can divide Saturn’s system into three main parts… The A-D ring zone Ring gaps and shepherd moons The E ring zone Ring supplies by Enceladus Tethys, Dione and Rhea have a lot of similarities The distant satellites Iapetus, Hyperion, Phoebe Linked together by exchange of material PYTS/ASTR 206 – Rings and Moons of Saturn 4 Discovery of Saturn’s Rings Discovered by Galileo Appearance in 1610 baffled him “…to my very great amazement Saturn was seen to me to be not a single star, but three together, which almost touch each other" It got more confusing… In 1612 the extra “stars” had disappeared “…I do not know what to say…" PYTS/ASTR 206 – Rings and Moons of Saturn 5 In 1616 the extra ‘stars’ were back Galileo’s telescope had improved He saw two “half-ellipses” He died in 1642 and never figured it out In the 1650s Huygens figured out that Saturn was surrounded by a flat disk The disk disappears when seen edge on He discovered Saturn’s -

THE SEARCH for EXOMOON RADIO EMISSIONS by JOAQUIN P. NOYOLA Presented to the Faculty of the Graduate School of the University Of
THE SEARCH FOR EXOMOON RADIO EMISSIONS by JOAQUIN P. NOYOLA Presented to the Faculty of the Graduate School of The University of Texas at Arlington in Partial Fulfillment of the Requirements for the Degree of DOCTOR OF PHILOSOPHY THE UNIVERSITY OF TEXAS AT ARLINGTON December 2015 Copyright © by Joaquin P. Noyola 2015 All Rights Reserved ii Dedicated to my wife Thao Noyola, my son Layton, my daughter Allison, and our future little ones. iii Acknowledgements I would like to express my sincere gratitude to all the people who have helped throughout my career at UTA, including my advising professors Dr. Zdzislaw Musielak (Ph.D.), and Dr. Qiming Zhang (M.Sc.) for their advice and guidance. Many thanks to my committee members Dr. Andrew Brandt, Dr. Manfred Cuntz, and Dr. Alex Weiss for your interest and for your time. Also many thanks to Dr. Suman Satyal, my collaborator and friend, for all the fruitful discussions we have had throughout the years. I would like to thank my wife, Thao Noyola, for her love, her help, and her understanding through these six years of marriage and graduate school. October 19, 2015 iv Abstract THE SEARCH FOR EXOMOON RADIO EMISSIONS Joaquin P. Noyola, PhD The University of Texas at Arlington, 2015 Supervising Professor: Zdzislaw Musielak The field of exoplanet detection has seen many new developments since the discovery of the first exoplanet. Observational surveys by the NASA Kepler Mission and several other instrument have led to the confirmation of over 1900 exoplanets, and several thousands of exoplanet potential candidates. All this progress, however, has yet to provide the first confirmed exomoon. -

Enceladus Orbiter
National Aeronautics and Space Administration Mission Concept Study Planetary Science Decadal Survey Enceladus Orbiter Science Champion: John Spencer ([email protected]) NASA HQ POC: Curt Niebur ([email protected]) May 2010 www.nasa.gov Data Release, Distribution, and Cost Interpretation Statements This document is intended to support the SS2012 Planetary Science Decadal Survey. The data contained in this document may not be modified in any way. Cost estimates described or summarized in this document were generated as part of a preliminary concept study, are model-based, assume a JPL in-house build, and do not constitute a commitment on the part of JPL or Caltech. References to work months, work years, or FTEs generally combine multiple staff grades and experience levels. Cost reserves for development and operations were included as prescribed by the NASA ground rules for the Planetary Science Decadal Survey. Unadjusted estimate totals and cost reserve allocations would be revised as needed in future more-detailed studies as appropriate for the specific cost-risks for a given mission concept. Enceladus Orbiter: Pre-Decisional—For Planning and Discussion Purposes Only i Planetary Science Decadal Survey Mission Concept Study Final Report Study Participants ......................................................................................................... v Acknowledgments ........................................................................................................ vi Executive Summary ................................................................................................... -
Perfect Little Planet Educator's Guide
Educator’s Guide Perfect Little Planet Educator’s Guide Table of Contents Vocabulary List 3 Activities for the Imagination 4 Word Search 5 Two Astronomy Games 7 A Toilet Paper Solar System Scale Model 11 The Scale of the Solar System 13 Solar System Models in Dough 15 Solar System Fact Sheet 17 2 “Perfect Little Planet” Vocabulary List Solar System Planet Asteroid Moon Comet Dwarf Planet Gas Giant "Rocky Midgets" (Terrestrial Planets) Sun Star Impact Orbit Planetary Rings Atmosphere Volcano Great Red Spot Olympus Mons Mariner Valley Acid Solar Prominence Solar Flare Ocean Earthquake Continent Plants and Animals Humans 3 Activities for the Imagination The objectives of these activities are: to learn about Earth and other planets, use language and art skills, en- courage use of libraries, and help develop creativity. The scientific accuracy of the creations may not be as im- portant as the learning, reasoning, and imagination used to construct each invention. Invent a Planet: Students may create (draw, paint, montage, build from household or classroom items, what- ever!) a planet. Does it have air? What color is its sky? Does it have ground? What is its ground made of? What is it like on this world? Invent an Alien: Students may create (draw, paint, montage, build from household items, etc.) an alien. To be fair to the alien, they should be sure to provide a way for the alien to get food (what is that food?), a way to breathe (if it needs to), ways to sense the environment, and perhaps a way to move around its planet. -

Geology and Stratigraphy of Saturn's Moon Tethys
EPSC Abstracts Vol. 8, EPSC2013-713, 2013 European Planetary Science Congress 2013 EEuropeaPn PlanetarSy Science CCongress c Author(s) 2013 Geology and Stratigraphy of Saturn’s moon Tethys R. J. Wagner (1), K. Stephan (1), N. Schmedemann (2), T. Roatsch (1), E. Kersten (1), G. Neukum (2), and C. C. Porco (3). (1) DLR, Inst. of Planetary Research, Berlin, Germany, (email: [email protected]), (2) Institute of Geosciences, Freie Universitaet Berlin, Germany, (3) Space Science Institute, Boulder/Co., USA. 1. Introduction 3.1 Cratered plains units Tethys is 1066 km in diameter and one of Saturn’s Hilly, rugged, undulating densely cratered plains six mid-sized icy satellites, orbiting Saturn between (cpd) were previously identified in Voyager images the volcanically active moon Enceladus und Dione. [5]. Fine-scale tectonic features such as narrow, The satellite was imaged for the first time by the linear to slightly arcuate fractures, are abundant in cameras aboard Voyager 1 & 2. These images some localities of this unit. A smooth cratered plains showed two major landforms: (a) the 445-km large unit (cps) occurs near the impact basin Penelope. impact basin Odysseus, and (b) the graben system This unit was detected in Voyager images [5], but its Ithaca Chasma [1][2]. The Cassini spacecraft, in boundaries can now be located more precisely in ISS orbit about Saturn since July 1, 2004, has made data. To the south of impact basin Odysseus, the several close passes at Tethys, providing an almost Cassini ISS data revealed a previously unknown hilly complete image coverage at 200 – 500 m/pxl cratered plains unit (cpsc) which has a lower resolutions. -

An Examination of Elliptical Craters on Saturn's Moons Tethys & Dione And
51st Lunar and Planetary Science Conference (2020) 2631.pdf Piecing Together the Bombardment Record: An examination of elliptical craters on Saturn’s Moons Tethys & Dione and implications for satellite evolution. Sierra N. Ferguson1, Alyssa R. Rhoden2, Steven J. Desch1, 1School of Earth and Space Exploration, Arizona State University, Tempe Arizona, [email protected], 2Southwest Research Institute, Division of Space Sciences, Boulder Colorado. Introduction: How old are the inner moons of Tethys. We interpreted this distinction to be caused by Saturn? This question is actively debated [1-3], spurred the different impactor sources at play in the Saturn by recent measurements by the Cassini-Huygens system. In this study, we utilize the basemaps of Tethys mission, and dynamical modeling. Modeling of and Dione to examine the global distributions of resonances between the inner moons (Mimas, elliptical craters across the satellites to evaluate if there Enceladus, Tethys, Dione, & Rhea) results in a is a global trend in elliptical crater orientations and what maximum age of 100 Myr, although this scenario is that means for the source population of these craters. We based on the Q of Saturn and how it has changed with find significant differences in the elliptical crater time [3]. A combined dynamics-thermal evolution populations of these two moons, at both regional and analysis by [4] found ages between 4 Gyr and 1 Gyr. global scales, with implications for the impactor Older moons are more likely to have had subsurface population within the Saturnian system. oceans within the last Gyr, but neither old nor young moons can easily explain present-day oceans in these Methods: We utilized ArcGIS and the basemaps moons. -

The Habitability of Icy Exomoons
University of Groningen Master thesis Astronomy The habitability of icy exomoons Supervisor: Author: Prof. Floris F.S. Van Der Tak Jesper N.K.Y. Tjoa Dr. Michael \Migo" Muller¨ June 27, 2019 Abstract We present surface illumination maps, tidal heating models and melting depth models for several icy Solar System moons and use these to discuss the potential subsurface habitability of exomoons. Small icy moons like Saturn's Enceladus may maintain oceans under their ice shells, heated by en- dogenic processes. Under the right circumstances, these environments might sustain extraterrestrial life. We investigate the influence of multiple orbital and physical characteristics of moons on the subsurface habitability of these bodies and model how the ice melting depth changes. Assuming a conduction only model, we derive an analytic expression for the melting depth dependent on seven- teen physical and orbital parameters of a hypothetical moon. We find that small to mid-sized icy satellites (Enceladus up to Uranus' Titania) locked in an orbital resonance and in relatively close orbits to their host planet are best suited to sustaining a subsurface habitable environment, and may do so largely irrespective of their host's distance from the parent star: endogenic heating is the primary key to habitable success, either by tidal heating or radiogenic processes. We also find that the circumplanetary habitable edge as formulated by Heller and Barnes (2013) might be better described as a manifold criterion, since the melting depth depends on seventeen (more or less) free parameters. We conclude that habitable exomoons, given the right physical characteristics, may be found at any orbit beyond the planetary habitable zone, rendering the habitable zone for moons (in principle) arbitrarily large. -

Tectonic Mapping of Rift Zones on Rhea, Tethys, and Dione P
46th Lunar and Planetary Science Conference (2015) 2251.pdf TECTONIC MAPPING OF RIFT ZONES ON RHEA, TETHYS, AND DIONE P. K. Byrne1, P. M. Schenk1, and P. J. McGovern1. 1Lunar and Planetary Institute, Universities Space Research Association, Houston, TX 77058 ([email protected]). ▪ Large rifts occur on each moon, increasing in Our global topographic products are combined from tectonic complexity from Rhea, to Tethys, to Dione stereophotogrammetry- and photoclinometry-derived ▪ Rifting is oriented ~N–S, concentrated within or DTMs. We have generated photomosaics at effective bordering these bodies’ trailing hemispheres resolutions of 400 m/px for Rhea, and at 250 m/px for ▪ The pattern of deformation is similar despite Tethys and Dione. Our global DTMs of Rhea, Tethys, differences in satellite size and interior structure and Dione have resolutions of 1,000 m/px, 500 m/px, and 400 m/px, respectively. Within ArcGIS, we record Introduction: Rhea, Tethys, and Dione are among the surface traces of tectonic landforms, document the largest moons of Saturn. Each exhibits substantial morphometrics such as overlap between individual extensional tectonic deformation in the form of rift fault segments, and estimate strains across select zones (termed chasmata). With a radius of 561 km, structures and the chasmata in general. Dione is likely primarily composed of water ice but Rift Zone Distributions: The distributions of the may have a silicate core. Tethys is 531 km in radius chasmata on Rhea, Tethys, and Dione, are shown and is composed almost entirely of water ice. Rhea has schematically in Fig. 1. a radius of 764 km and consists primarily of water ice, but whether this moon is differentiated is unknown [1]. -

Spectroscopy of Mimas, Enceladus, Tethys, and Rhea
A&A 435, 353–362 (2005) Astronomy DOI: 10.1051/0004-6361:20042482 & c ESO 2005 Astrophysics Near-infrared (0.8–4.0 µm) spectroscopy of Mimas, Enceladus, Tethys, and Rhea J. P. Emery1,,D.M.Burr2,D.P.Cruikshank3,R.H.Brown4, and J. B. Dalton5 1 NASA Ames Research Center/SETI Institute, Mail Stop 245-6, Moffett Field, CA 94035, USA e-mail: [email protected] 2 USGS Astrogeology Branch, 2255 N Gemini Dr, Flagstaff, AZ 86001, USA 3 NASA Ames Research Center, Mail Stop 245-6, Moffett Field, CA 94035, USA 4 Lunar and Planetary Laboratory, Univ. of Arizona, 1629 E. University Dr, Tucson, AZ 85721, USA 5 NASA Ames Research Center/SETI Institute, Mail Stop 245-3, Moffett Field, CA 94035, USA Received 3 December 2004 / Accepted 25 January 2005 Abstract. Spectral measurements from the ground in the time leading up to the Cassini mission at Saturn provide important context for the interpretation of the forthcoming spacecraft data. Whereas ground-based observations cannot begin to approach the spatial scales Cassini will achieve, they do possess the benefits of better spectral resolution, a broader possible time baseline, and unique veiewing geometries not obtained by spacecraft (i.e., opposition). In this spirit, we present recent NIR reflectance spectra of four icy satellites of Saturn measured with the SpeX instrument at the IRTF. These measurements cover the range 0.8–4.0 µm of both the leading and trailing sides of Tethys and the leading side of Rhea. The L-band region (2.8–4.0 µm) offers new opportunities for searches of minor components on these objects.