Mechatronics: for Practical Works in Professional English
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

B.Sc. Mechatronics Specialization: Photonic Engineering
Study plan for: B.Sc. Mechatronics Specialization: Photonic Engineering Faculty of Mechatronics Study plan for reference only; may be subject to change. Semester 1 Course Lecture Tutorial Labs Pojects ECTS (hours) (hours) (hours) (hours) Physical Education and Sports 30 Patents and Intelectual Property 30 2 Optics and Photonics Applications 30 15 3 Calculus I 30 45 7 Algebra and Geometry 15 30 4 Engineering Graphics 15 30 2 Materials 30 2 Computer Science I 30 30 6 Engineering Physics 30 30 4 Total ECTS 30 Semester 2 Course Lecture Tutorial Labs Pojects ECTS (hours) (hours) (hours) (hours) Physical Education and Sports 30 Economics 30 2 Elective Lecture 1/Virtual and 30 3 Augmented Reality Calculus II 30 30 5 Engineering Graphics ‐ CAD 30 2 Computer Science II 15 15 5 Mechanics I i II 45 45 6 Mechanics of Structures I 30 15 4 Electric Circuits I 30 15 3 Total ECTS 30 1 Study Plan for B.Sc. Mechatronics (Spec. Photonic Engineering) Semester 3 Course Lecture Tutorial Labs Pojects ECTS (hours) (hours) (hours) (hours) Physical Education and Sports 30 0 Foreign Language 60 4 Elective Lecture 2/Introduction to 30 3 MEMS Calculus III 15 30 6 Mechanics of Structures II 15 15 4 Manufacturing Technology I 30 4 Fine Machine Design I 15 30 3 Electric Circuits II 30 3 Basics of Automation and Control I 30 15 4 Total ECTS 31 Semester 4 Course Lecture Tutorial Labs Pojects ECTS (hours) (hours) (hours) (hours) Physical Education and Sports 30 Foreign Language 60 4 Elective Lecture 3/Photographic 30 3 techniques in image acqusition Elective Lecture 4 30 3 /Enterpreneurship Optomechatronics 30 30 5 Electronics I 15 15 2 Electronics II 15 1 Fine Machine Design II 15 15 3 Manufacturing Technology 30 2 Metrology 30 30 4 Total ECTS 27 Semester 5 Course Lecture Tutorial Labs Pojects ECTS (hours) (hours) (hours) (hours) Physical Education and Sports 30 0 Foreign Language 60 4 Marketing 30 2 Elective Lecture 5/ Electric 30 2 2 Study Plan for B.Sc. -

Controlling Phonons and Photons at the Wavelength-Scale: Silicon Photonics Meets Silicon Phononics
1 Controlling phonons and photons at the wavelength-scale: silicon photonics meets silicon phononics AMIR H. SAFAVI-NAEINI1,D RIES VAN THOURHOUT2,R OEL BAETS2, AND RAPHAËL VAN LAER1,2 1Department of Applied Physics and Ginzton Laboratory, Stanford University, USA 2Photonics Research Group (INTEC), Department of Information Technology, Ghent University–imec, Belgium .Center for Nano- and Biophotonics, Ghent University, Belgium Compiled October 9, 2018 Radio-frequency communication systems have long used bulk- and surface-acoustic-wave de- vices supporting ultrasonic mechanical waves to manipulate and sense signals. These devices have greatly improved our ability to process microwaves by interfacing them to orders-of- magnitude slower and lower loss mechanical fields. In parallel, long-distance communications have been dominated by low-loss infrared optical photons. As electrical signal processing and transmission approaches physical limits imposed by energy dissipation, optical links are now being actively considered for mobile and cloud technologies. Thus there is a strong driver for wavelength-scale mechanical wave or “phononic” circuitry fabricated by scalable semiconduc- tor processes. With the advent of these circuits, new micro- and nanostructures that combine electrical, optical and mechanical elements have emerged. In these devices, such as optomechan- ical waveguides and resonators, optical photons and gigahertz phonons are ideally matched to one another as both have wavelengths on the order of micrometers. The development of phononic circuits has thus emerged as a vibrant field of research pursued for optical signal pro- cessing and sensing applications as well as emerging quantum technologies. In this review, we discuss the key physics and figures of merit underpinning this field. -

The Science and Education of Mechatronics Engineering
Both photos: ©2000 Artville, LLC. Emphasizing Team Building in a Problem- and Project-Based Curriculum to Meet the Challenges of the Interdisciplinary Nature of this Field o far there is no common and widely accepted under- N Hewit in [3] states: A precise definition of mechatronics is standing of what mechatronics really is. Many different not possible, nor is it particularly desirable, because the notions similar to or including mechatronics have been field is new and expanding rapidly; too rigid a definition used in various contexts; micromechatronics, opto- would be constraining and limiting, and that is pre- mechatronics, supermechatronics, mecanoin- cisely what is not wanted at present. Sformatics, contromechanics and megatronics are Mechatronics as an interdisciplinary subject some of these, each coined to put forward a tends to attract contributions from all related specific aspect or application of mech- fields without really putting forward the atronics. Examples of attempts to describe opportunities and challenges arising spe- mechatronics include the following. cifically due to the interdisciplinary inter- N Mechatronics encompasses the actions. An example of this is that many knowledge and the technologies mechatronics conferences have been required for the flexible genera- unfocused and thereby have not at- tion of controlled motions [1]. tracted the most adequate contributions, N Mechatronics is the synergistic which definitely exist. This is a disadvan- combination of mechanical and tage in that it hampers the development of electrical engineering, computer sci- mechatronics as an engineering science. Sci- ence, and information technology, entific publications in mechatronics, to help in which includes control systems as well as nu- making the subject more focused, are still quite rare. -

MAE 4710: MECHATRONICS – Engineering Supergenius Edition
MAE 4710: MECHATRONICS – Engineering Supergenius Edition Mechatronics involves the integration of mechanical engineering with electronics and intelligent computer control in the design and manufacturing of industrial products and processes. It's synergy at its best. This course surveys basic electrical circuits, electromechanical actuators, analog signals, digital signals, various sensors, basic control algorithms, and microcontroller programming. This course includes weekly, hands-on, laboratory exercises as well as design projects involving both hardware and software. Note that MAE 4710 is a 4-credit, 4000-level course. You will do a lot of work. In this TLP edition of the course, we’ll do things a little differently than the “regular” section run by Gavin Garner, though we’ll rely on much of the excellent content he has developed over the years. Because we have fewer students, we can spend more time doing projects, as opposed to ‘just’ labs. This will be a little experimental. Please have patience. Instructor: Greg Lewin: [email protected] Lab Assistant: TBD Office Hours: TBD Lectures: MWF 11:00 – 11:50 in Rice 120. Laboratories: Labs will be held Wednesdays from 2:00 – 5:00 and 6:00 – 9:00. I don’t care which section you show up to, but you need to be consistent from week to week (with exceptions, should something unexpected arise). Grading: Grading will be a combination of homework, worksheets, post-lab quizzes and design challenges, and projects. Because I am rearranging the course a bit this year, I honestly don’t know exactly how many of each we’ll have, but expect: 8 – 10 labs (each with a pre-lab, worksheet, and quiz), 2-3 projects throughout the term, plus a final project. -
Electrical Engineering Engineering
College of Electrical Engineering Engineering The undergraduate electrical engineering degree program seeks to produce gradu- Second Semester ates who are trained in the theory and practice of electrical and computer engineering EE 468G Introduction to Engineering Electromagnetics ........................................ 4 and are well prepared to handle the professional and leadership challenges of their Elective EE Laboratory [L] ...................................................................................... 2 careers. The program allows students to specialize in high performance and embed- Engineering/Science Elective [E] ............................................................................ 3 ded computing, microelectronics and nanotechnology, power and energy, signal Technical Elective [T] ............................................................................................. 3 processing and communications, high frequency circuits and fields, and control UK Core – Citizenship - USA .................................................................................. 3 systems, among others. Senior Year Degree Requirements The following curriculum meets the requirements for a B.S. in Electrical Engineering, First Semester Hours provided the student satisfies UK Core requirements and graduation requirements EE/CPE 490 ECE Capstone Design I† ..................................................................... 3 of the College of Engineering. EE Technical Elective* ........................................................................................... -

Robotic and Electronic Engineering Technology Mntc General Education
2020-2021 Technical Requirements .............57 Robotic and Electronic Engineering Technology MnTC General Education ..........15 Associate of Applied Science (AAS) Degree Total Credits ...............................72 Mechatronic Applications: Evaluate and determine that all Program Information • mechatronic equipment is in proper working condition, ensuring The Anoka Technical College Electronic Engineering Technology a safe, reliable manufacturing environment. (EET) program offers a 72-credit Robotic and Electronic Engineering • Safety Compliance: Participate in class in a professional manner, Technology Associate of Applied Science (AAS) degree that prepares by acting in compliance with documented safety procedures and students to work with mechatronics, robotics, automation and controls, appropriate industry standards. computer servicing/networking, and biomedical equipment. Course Prerequisites Students gain a thorough understanding of how computers and machines communicate as well as system level troubleshooting, plus Some courses may require appropriate test score or completion of a solid education in electronic engineering technology fundamentals. basic math, basic English and/or reading courses with a “C” or better. Students will also learn about: Graduation Requirements • Mechatronics All Anoka Technical College students seeking an Associate in Applied • Lasers and Optics Science (AAS), diploma, or certificate must meet the cumulative grade • Robotics point average (GPA) of 2.0 or higher. • Computer Troubleshooting A+ • Networking -

South Carolina State University, B.S., Mechatronics Engineering
CAAL 07/09/2020 Agenda Item 5p New Program Proposal Bachelor of Science in Mechatronics Engineering South Carolina State University Summary South Carolina State University requests approval to offer a program leading to the Bachelor of Science in Mechatronics Engineering, to be implemented in the Fall of 2020 through traditional course delivery. The following chart outlines the stages of approval for the proposed program. The Advisory Committee on Academic Programs (ACAP) voted to recommend approval of the proposal. The full program proposal is attached. Stages of Date Comments Consideration Program Proposal 2/10/20 Not Applicable Received Staff comments to 3/10/20 Staff requested revisions to the program proposal to address the institution questions about degree type, delivery sites, and the impact on existing programs. Revised Program 3/16/20 The revised proposal satisfactorily addressed the requested Proposal Received revisions. ACAP Consideration 6/9/20 The South Carolina State University (SCSU) representative presented the proposal. Citing a partnership with the State Technical College System, the representative noted the proposed program was developed in response to meeting the greater demand for engineering graduates in the state. Presently, no other comparable degree program exists in-state, though it is extant nationally. The program is interdisciplinary and can serve as a pathway for students who receive an associate’s degree in the field and can facilitate matriculation into related engineering graduate programs. The representative stated that the program is designed to meet on campus with the option of also meeting at other technical college campuses as the program develops. In addition, the proposed program is aligned with ABET accreditation standards, and the institution reaffirmed its commitment to the program given pandemic conditions. -

Methods of Using Mobile Internet Devices in the Formation of The
217 Methods of using mobile Internet devices in the formation of the general scientific component of bachelor in electromechanics competency in modeling of technical objects Yevhenii O. Modlo1[0000-0003-2037-1557], Serhiy O. Semerikov2,3,4[0000-0003-0789-0272], Stanislav L. Bondarevskyi3[0000-0003-3493-0639], Stanislav T. Tolmachev3[0000-0002-5513-9099], Oksana M. Markova3[0000-0002-5236-6640] and Pavlo P. Nechypurenko2[0000-0001-5397-6523] 1 Kryvyi Rih Metallurgical Institute of the National Metallurgical Academy of Ukraine, 5, Stephana Tilhy Str., Kryvyi Rih, 50006, Ukraine [email protected] 2 Kryvyi Rih State Pedagogical University, 54, Gagarina Ave., Kryvyi Rih, 50086, Ukraine [email protected], [email protected] 3 Kryvyi Rih National University, 11, Vitaliy Matusevych Str., Kryvyi Rih, 50027, Ukraine [email protected], [email protected], [email protected] 3 Institute of Information Technologies and Learning Tools of NAES of Ukraine, 9, M. Berlynskoho Str., Kyiv, 04060, Ukraine Abstract. An analysis of the experience of professional training bachelors of electromechanics in Ukraine and abroad made it possible to determine that one of the leading trends in its modernization is the synergistic integration of various engineering branches (mechanical, electrical, electronic engineering and automation) in mechatronics for the purpose of design, manufacture, operation and maintenance electromechanical equipment. Teaching mechatronics provides for the meaningful integration of various disciplines of professional and practical training bachelors of electromechanics based on the concept of modeling and technological integration of various organizational forms and teaching methods based on the concept of mobility. Within this approach, the leading learning tools of bachelors of electromechanics are mobile Internet devices (MID) – a multimedia mobile devices that provide wireless access to information and communication Internet services for collecting, organizing, storing, processing, transmitting, presenting all kinds of messages and data. -
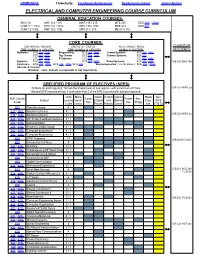
Electrical and Computer Engineering Course
HOMEPAGE Flowcharts: Freshman-Sophomore Sophomore-Junior Junior-Senior ELECTRICAL AND COMPUTER ENGINEERING COURSE CURRICULUM GENERAL EDUCATION COURSES: BIO 110 MAT 114 / 115 MAT 116 / 216 MTE 207 ECE 302 / 352L* CHM 111 / 151L PHY 131 / 151L PHY 133 / 153L MTE 214 ECE 311 CHM 112 / 152L PHY 132 / 132L MAT 214 / 215 ME 214 / 215 CORE COURSES: CONTINOUS / ANALOG DISCRETE / DIGITAL REAL / MIXED MODE CHOICE OF TIME SIGNALS & CIRCUITS TIME SIGNALS & CIRCUITS SIGNAL & SYSTEMS SEQUENCE Networks: ECE 109 / 129L Programming: ECE 114 , 164L Control Systems: ECE 309 , 359L ECE 207 , 252L Dig. Circuits ECE 204 , 244L Commu. Systems: ECE 315 ECE 209 , 253L & Systems: ECE 308 ECE 405 , 445L Systems: ECE 307 , 357L ECE 341 / 391L Power Systems: ECE 310 / 360L IGE120 ENG104 Electronic ECE 220 , 270L , ECE 320 , 370L, ECE 330 *Electromagnetics: ( in GE above ) ECE 302 / 352L Devices & Circuits: Notation: / and , indicate co-requisiste or not respectively SPECIFIED PROGRAM OF ELECTIVES (SPES) 20 Units for each required, 16 from the shaded ares in one column, with a minimum of 2 labs. IGE121AREA 3a General SPE requires at least 5 units each from 2 of the SPE Columns with advisors approval. Units Micro- Comm. Control Instrum Radio Gen. ECE Course Comp. Power Illum. Subject Lecture electr- & Signal and Biomed Freq. S P E & Lab Sys. Sys. Engg / Labs onics Proces. Robotic Ocean Sys. (T B D) 303 Data Structures 4 317 / 367L Electromechanics 4 / 1 IGE122 AREA 3c 318 / 368L Electromechanics 4 / 1 322 / 372L OP Amps./Feedback Systems 4 / 1 323 / 373L Instrumentation -
Electromechanical Motion Fundamentals
Electromechanical Motion Fundamentals • Electric Machine – device that can convert either mechanical energy to electrical energy or electrical energy to mechanical energy – mechanical to electrical: generator – electrical to mechanical: motor – all practical motors and generators convert energy from one form to another through the action of a magnetic field • Transformer – device that converts ac electric energy at one voltage level to ac electric energy at another voltage level Sensors & Actuators in Mechatronics K. Craig Electromechanical Motion Fundamentals 1 – It operates on the same principles as generators and motors, i.e., it depends on the action of a magnetic field to accomplish the change in voltage level • Motors, Generators, and Transformers are ubiquitous in modern daily life. Why? – Electric power is: • Clean • Efficient • Easy to transmit over long distances • Easy to control • Environmental benefits Sensors & Actuators in Mechatronics K. Craig Electromechanical Motion Fundamentals 2 • Purpose of this Study – provide basic knowledge of electromechanical motion devices for mechatronic engineers – focus on electromechanical rotational devices commonly used in low-power mechatronic systems • permanent magnet dc motor • brushless dc motor • stepper motor • Topics Covered: – Magnetic and Magnetically-Coupled Circuits – Principles of Electromechanical Energy Conversion Sensors & Actuators in Mechatronics K. Craig Electromechanical Motion Fundamentals 3 References • Electromechanical Motion Devices, P. Krause and O. Wasynczuk, McGraw Hill, 1989. • Electromechanical Dynamics, H. Woodson and J. Melcher, Wiley, 1968. • Electric Machinery Fundamentals, 3rd Edition, S. Chapman, McGraw Hill, 1999. • Driving Force, The Natural Magic of Magnets, J. Livingston, Harvard University Press, 1996. • Applied Electromagnetics, M. Plonus, McGraw Hill, 1978. • Electromechanics and Electric Machines, S. Nasar and L. Unnewehr, Wiley, 1979. -

Electromechanical Dynamics
Electromechanical Dynamics James R. Melcher Herbert H. Woodson MIT OpenCourseWare http://ocw.mit.edu Electromechanical Dynamics For any use or distribution of this textbook, please cite as follows: Woodson, Herbert H., and James R. Melcher. Electromechanical Dynamics. 3 vols. (Massachusetts Institute of Technology: MIT OpenCourseWare). http://ocw.mit.edu (accessed MM DD, YYYY). License: Creative Commons Attribution-NonCommercial-Share Alike For more information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms ELECTROMECHANICAL DYNAMICS Part I: Discrete Systems ELECTROMECHANICAL DYNAMICS Part I: Discrete Systems HERBERT H. WOODSON Philip Sporn Professor of Energy Processing Departments of Electrical and Mechanical Engineering JAMES R. MELCHER Associate Professor of Electrical Engineering Department of Electrical Engineering both of Massachusetts Institute of Technology JOHN WILEY & SONS, INC., NEW YORK - LONDON . SYDNEY __ ~__ To our parents I_ PREFACE Part I: Discrete Systems In the early 1950's the option structure was abandoned and a common core curriculum was instituted for all electrical engineering students at M.I.T. The objective of the core curriculum was then, and is now, to provide a foundation in mathematics and science on which a student can build in his professional growth, regardless of the many opportunities in electrical engineering from which he may choose. In meeting this objective, core curriculum subjects cannot serve the needs of any professional area with respect to nomenclature, techniques, and problems unique to that area. Specialization comes in elective subjects, graduate study, and professional activities. To be effective a core curriculum subject must be broad enough to be germane to the many directions an electrical engineer may go professionally, yet it must have adequate depth to be of lasting value. -

Automation, Robotics and Mechatronics Aas Degree
AUTOMATION, ROBOTICS AND MECHATRONICS A.A.S. DEGREE www.clcillinois.edu/programs/arm A.A.S. PROGRAM OVERVIEW AUTOMATION, ROBOTICS TYPICAL JOBS AND MECHATRONICS • Mechatronics Technician Engineering, Math and Physical Sciences • Robotics Technician Division, Room T302, (847) 543-2044 Degree: Associate in Applied Science, • Electrical and Electronic Automation, Robotics and Mechatronics • Equipment Assembler The automation, robotics, and mechatronics Plan 24ZD • Electrical and Electronics field combines mechanics, electronics and Repairer computer technologies to create “smart” FIRST SEMESTER 17 (commercial or industrial products that improve lives in countless ways. MET 299 Special Topics: Math 1 equipment) Mechatronics technicians help design, install, MET 299 Special Topics: Communications 1 • Electro-mechanical Technician maintain and repair industrial equipment ARM 111 Fundamentals of High • Maintenance and Repair Worker and a wide variety of appliances used in Tech Manufacturing I and • Maintenance Worker, Machinery businesses and at home. These range from ARM 112 Fundamentals of High • Mechanical Engineering personal and industrial robots to artificial and Tech Manufacturing II Technician limbs, automatic teller machines (ATMs) and ARM 113 Fundamentals of High • Programmable Logic Controller hybrid cars—just to name a few. A holder Tech Manufacturing III 3 (PLC) Installer of an associate degree in Mechatronics can ARM 116 and Mechatronics Graphics I • Entry-level PLC Programmer manage, investigate, repair and troubleshoot ARM 117 and Mechatronics Graphics II • Technical Sales Representative mechatronic and process control systems along ARM 118 Mechatronics Graphics III 3 with optimizing systems for efficiency and cost ARM 151 Mechanical Systems I and effectiveness. A mechatronics technician can ARM 152 Mechanical Systems II and work in workshops, design labs, production ARM 153 Mechanical Systems III 3 GETTING STARTED facilities, and in field service locations.