BAIRE ONE FUNCTIONS 1. History Baire One Functions Are Named in Honor of René-Louis Baire (1874- 1932), a French Mathematician
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Symmetric Rigidity for Circle Endomorphisms with Bounded Geometry
SYMMETRIC RIGIDITY FOR CIRCLE ENDOMORPHISMS WITH BOUNDED GEOMETRY JOHN ADAMSKI, YUNCHUN HU, YUNPING JIANG, AND ZHE WANG Abstract. Let f and g be two circle endomorphisms of degree d ≥ 2 such that each has bounded geometry, preserves the Lebesgue measure, and fixes 1. Let h fixing 1 be the topological conjugacy from f to g. That is, h ◦ f = g ◦ h. We prove that h is a symmetric circle homeomorphism if and only if h = Id. Many other rigidity results in circle dynamics follow from this very general symmetric rigidity result. 1. Introduction A remarkable result in geometry is the so-called Mostow rigidity theorem. This result assures that two closed hyperbolic 3-manifolds are isometrically equivalent if they are homeomorphically equivalent [18]. A closed hyperbolic 3-manifold can be viewed as the quotient space of a Kleinian group acting on the open unit ball in the 3-Euclidean space. So a homeomorphic equivalence between two closed hyperbolic 3-manifolds can be lifted to a homeomorphism of the open unit ball preserving group actions. The homeomorphism can be extended to the boundary of the open unit ball as a boundary map. The boundary is the Riemann sphere and the boundary map is a quasi-conformal homeomorphism. A quasi-conformal homeomorphism of the Riemann 2010 Mathematics Subject Classification. Primary: 37E10, 37A05; Secondary: 30C62, 60G42. Key words and phrases. quasisymmetric circle homeomorphism, symmetric cir- arXiv:2101.06870v1 [math.DS] 18 Jan 2021 cle homeomorphism, circle endomorphism with bounded geometry preserving the Lebesgue measure, uniformly quasisymmetric circle endomorphism preserving the Lebesgue measure, martingales. -

Math 137 Calculus 1 for Honours Mathematics Course Notes
Math 137 Calculus 1 for Honours Mathematics Course Notes Barbara A. Forrest and Brian E. Forrest Version 1.61 Copyright c Barbara A. Forrest and Brian E. Forrest. All rights reserved. August 1, 2021 All rights, including copyright and images in the content of these course notes, are owned by the course authors Barbara Forrest and Brian Forrest. By accessing these course notes, you agree that you may only use the content for your own personal, non-commercial use. You are not permitted to copy, transmit, adapt, or change in any way the content of these course notes for any other purpose whatsoever without the prior written permission of the course authors. Author Contact Information: Barbara Forrest ([email protected]) Brian Forrest ([email protected]) i QUICK REFERENCE PAGE 1 Right Angle Trigonometry opposite ad jacent opposite sin θ = hypotenuse cos θ = hypotenuse tan θ = ad jacent 1 1 1 csc θ = sin θ sec θ = cos θ cot θ = tan θ Radians Definition of Sine and Cosine The angle θ in For any θ, cos θ and sin θ are radians equals the defined to be the x− and y− length of the directed coordinates of the point P on the arc BP, taken positive unit circle such that the radius counter-clockwise and OP makes an angle of θ radians negative clockwise. with the positive x− axis. Thus Thus, π radians = 180◦ sin θ = AP, and cos θ = OA. 180 or 1 rad = π . The Unit Circle ii QUICK REFERENCE PAGE 2 Trigonometric Identities Pythagorean cos2 θ + sin2 θ = 1 Identity Range −1 ≤ cos θ ≤ 1 −1 ≤ sin θ ≤ 1 Periodicity cos(θ ± 2π) = cos θ sin(θ ± 2π) = sin -

G-Convergence and Homogenization of Some Sequences of Monotone Differential Operators
Thesis for the degree of Doctor of Philosophy Östersund 2009 G-CONVERGENCE AND HOMOGENIZATION OF SOME SEQUENCES OF MONOTONE DIFFERENTIAL OPERATORS Liselott Flodén Supervisors: Associate Professor Anders Holmbom, Mid Sweden University Professor Nils Svanstedt, Göteborg University Professor Mårten Gulliksson, Mid Sweden University Department of Engineering and Sustainable Development Mid Sweden University, SE‐831 25 Östersund, Sweden ISSN 1652‐893X, Mid Sweden University Doctoral Thesis 70 ISBN 978‐91‐86073‐36‐7 i Akademisk avhandling som med tillstånd av Mittuniversitetet framläggs till offentlig granskning för avläggande av filosofie doktorsexamen onsdagen den 3 juni 2009, klockan 10.00 i sal Q221, Mittuniversitetet, Östersund. Seminariet kommer att hållas på svenska. G-CONVERGENCE AND HOMOGENIZATION OF SOME SEQUENCES OF MONOTONE DIFFERENTIAL OPERATORS Liselott Flodén © Liselott Flodén, 2009 Department of Engineering and Sustainable Development Mid Sweden University, SE‐831 25 Östersund Sweden Telephone: +46 (0)771‐97 50 00 Printed by Kopieringen Mittuniversitetet, Sundsvall, Sweden, 2009 ii Tothememoryofmyfather G-convergence and Homogenization of some Sequences of Monotone Differential Operators Liselott Flodén Department of Engineering and Sustainable Development Mid Sweden University, SE-831 25 Östersund, Sweden Abstract This thesis mainly deals with questions concerning the convergence of some sequences of elliptic and parabolic linear and non-linear oper- ators by means of G-convergence and homogenization. In particular, we study operators with oscillations in several spatial and temporal scales. Our main tools are multiscale techniques, developed from the method of two-scale convergence and adapted to the problems stud- ied. For certain classes of parabolic equations we distinguish different cases of homogenization for different relations between the frequen- cies of oscillations in space and time by means of different sets of local problems. -

Generalizations of the Riemann Integral: an Investigation of the Henstock Integral
Generalizations of the Riemann Integral: An Investigation of the Henstock Integral Jonathan Wells May 15, 2011 Abstract The Henstock integral, a generalization of the Riemann integral that makes use of the δ-fine tagged partition, is studied. We first consider Lebesgue’s Criterion for Riemann Integrability, which states that a func- tion is Riemann integrable if and only if it is bounded and continuous almost everywhere, before investigating several theoretical shortcomings of the Riemann integral. Despite the inverse relationship between integra- tion and differentiation given by the Fundamental Theorem of Calculus, we find that not every derivative is Riemann integrable. We also find that the strong condition of uniform convergence must be applied to guarantee that the limit of a sequence of Riemann integrable functions remains in- tegrable. However, by slightly altering the way that tagged partitions are formed, we are able to construct a definition for the integral that allows for the integration of a much wider class of functions. We investigate sev- eral properties of this generalized Riemann integral. We also demonstrate that every derivative is Henstock integrable, and that the much looser requirements of the Monotone Convergence Theorem guarantee that the limit of a sequence of Henstock integrable functions is integrable. This paper is written without the use of Lebesgue measure theory. Acknowledgements I would like to thank Professor Patrick Keef and Professor Russell Gordon for their advice and guidance through this project. I would also like to acknowledge Kathryn Barich and Kailey Bolles for their assistance in the editing process. Introduction As the workhorse of modern analysis, the integral is without question one of the most familiar pieces of the calculus sequence. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -
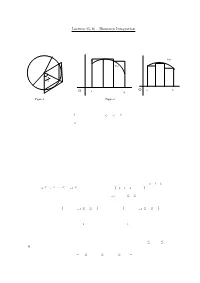
Lecture 15-16 : Riemann Integration Integration Is Concerned with the Problem of finding the Area of a Region Under a Curve
1 Lecture 15-16 : Riemann Integration Integration is concerned with the problem of ¯nding the area of a region under a curve. Let us start with a simple problem : Find the area A of the region enclosed by a circle of radius r. For an arbitrary n, consider the n equal inscribed and superscibed triangles as shown in Figure 1. f(x) f(x) π 2 n O a b O a b Figure 1 Figure 2 Since A is between the total areas of the inscribed and superscribed triangles, we have nr2sin(¼=n)cos(¼=n) · A · nr2tan(¼=n): By sandwich theorem, A = ¼r2: We will use this idea to de¯ne and evaluate the area of the region under a graph of a function. Suppose f is a non-negative function de¯ned on the interval [a; b]: We ¯rst subdivide the interval into a ¯nite number of subintervals. Then we squeeze the area of the region under the graph of f between the areas of the inscribed and superscribed rectangles constructed over the subintervals as shown in Figure 2. If the total areas of the inscribed and superscribed rectangles converge to the same limit as we make the partition of [a; b] ¯ner and ¯ner then the area of the region under the graph of f can be de¯ned as this limit and f is said to be integrable. Let us de¯ne whatever has been explained above formally. The Riemann Integral Let [a; b] be a given interval. A partition P of [a; b] is a ¯nite set of points x0; x1; x2; : : : ; xn such that a = x0 · x1 · ¢ ¢ ¢ · xn¡1 · xn = b. -

Bounded Holomorphic Functions of Several Variables
Bounded holomorphic functions of several variables Gunnar Berg Introduction A characteristic property of holomorphic functions, in one as well as in several variables, is that they are about as "rigid" as one can demand, without being iden- tically constant. An example of this rigidity is the fact that every holomorphic function element, or germ of a holomorphic function, has associated with it a unique domain, the maximal domain to which the function can be continued. Usually this domain is no longer in euclidean space (a "schlicht" domain), but lies over euclidean space as a many-sheeted Riemann domain. It is now natural to ask whether, given a domain, there is a holomorphic func- tion for which it is the domain of existence, and for domains in the complex plane this is always the case. This is a consequence of the Weierstrass product theorem (cf. [13] p. 15). In higher dimensions, however, the situation is different, and the domains of existence, usually called domains of holomorphy, form a proper sub- class of the class of aU domains, which can be characterised in various ways (holo- morphic convexity, pseudoconvexity etc.). To obtain a complete theory it is also in this case necessary to consider many-sheeted domains, since it may well happen that the maximal domain to which all functions in a given domain can be continued is no longer "schlicht". It is possible to go further than this, and ask for quantitative refinements of various kinds, such as: is every domain of holomorphy the domain of existence of a function which satisfies some given growth condition? Certain results in this direction have been obtained (cf. -

Sequences, Series and Taylor Approximation (Ma2712b, MA2730)
Sequences, Series and Taylor Approximation (MA2712b, MA2730) Level 2 Teaching Team Current curator: Simon Shaw November 20, 2015 Contents 0 Introduction, Overview 6 1 Taylor Polynomials 10 1.1 Lecture 1: Taylor Polynomials, Definition . .. 10 1.1.1 Reminder from Level 1 about Differentiable Functions . .. 11 1.1.2 Definition of Taylor Polynomials . 11 1.2 Lectures 2 and 3: Taylor Polynomials, Examples . ... 13 x 1.2.1 Example: Compute and plot Tnf for f(x) = e ............ 13 1.2.2 Example: Find the Maclaurin polynomials of f(x) = sin x ...... 14 2 1.2.3 Find the Maclaurin polynomial T11f for f(x) = sin(x ) ....... 15 1.2.4 QuestionsforChapter6: ErrorEstimates . 15 1.3 Lecture 4 and 5: Calculus of Taylor Polynomials . .. 17 1.3.1 GeneralResults............................... 17 1.4 Lecture 6: Various Applications of Taylor Polynomials . ... 22 1.4.1 RelativeExtrema .............................. 22 1.4.2 Limits .................................... 24 1.4.3 How to Calculate Complicated Taylor Polynomials? . 26 1.5 ExerciseSheet1................................... 29 1.5.1 ExerciseSheet1a .............................. 29 1.5.2 FeedbackforSheet1a ........................... 33 2 Real Sequences 40 2.1 Lecture 7: Definitions, Limit of a Sequence . ... 40 2.1.1 DefinitionofaSequence .......................... 40 2.1.2 LimitofaSequence............................. 41 2.1.3 Graphic Representations of Sequences . .. 43 2.2 Lecture 8: Algebra of Limits, Special Sequences . ..... 44 2.2.1 InfiniteLimits................................ 44 1 2.2.2 AlgebraofLimits.............................. 44 2.2.3 Some Standard Convergent Sequences . .. 46 2.3 Lecture 9: Bounded and Monotone Sequences . ..... 48 2.3.1 BoundedSequences............................. 48 2.3.2 Convergent Sequences and Closed Bounded Intervals . .... 48 2.4 Lecture10:MonotoneSequences . -

Euler's Calculation of the Sum of the Reciprocals of the Squares
Euler's Calculation of the Sum of the Reciprocals of the Squares Kenneth M. Monks ∗ August 5, 2019 A central theme of most second-semester calculus courses is that of infinite series. Simply put, to study infinite series is to attempt to answer the following question: What happens if you add up infinitely many numbers? How much sense humankind made of this question at different points throughout history depended enormously on what exactly those numbers being summed were. As far back as the third century bce, Greek mathematician and engineer Archimedes (287 bce{212 bce) used his method of exhaustion to carry out computations equivalent to the evaluation of an infinite geometric series in his work Quadrature of the Parabola [Archimedes, 1897]. Far more difficult than geometric series are p-series: series of the form 1 X 1 1 1 1 = 1 + + + + ··· np 2p 3p 4p n=1 for a real number p. Here we show the history of just two such series. In Section 1, we warm up with Nicole Oresme's treatment of the harmonic series, the p = 1 case.1 This will lessen the likelihood that we pull a muscle during our more intense Section 3 excursion: Euler's incredibly clever method for evaluating the p = 2 case. 1 Oresme and the Harmonic Series In roughly the year 1350 ce, a University of Paris scholar named Nicole Oresme2 (1323 ce{1382 ce) proved that the harmonic series does not sum to any finite value [Oresme, 1961]. Today, we would say the series diverges and that 1 1 1 1 + + + + ··· = 1: 2 3 4 His argument was brief and beautiful! Let us admire it below. -

Notes on Metric Spaces
Notes on Metric Spaces These notes introduce the concept of a metric space, which will be an essential notion throughout this course and in others that follow. Some of this material is contained in optional sections of the book, but I will assume none of that and start from scratch. Still, you should check the corresponding sections in the book for a possibly different point of view on a few things. The main idea to have in mind is that a metric space is some kind of generalization of R in the sense that it is some kind of \space" which has a notion of \distance". Having such a \distance" function will allow us to phrase many concepts from real analysis|such as the notions of convergence and continuity|in a more general setting, which (somewhat) surprisingly makes many things actually easier to understand. Metric Spaces Definition 1. A metric on a set X is a function d : X × X ! R such that • d(x; y) ≥ 0 for all x; y 2 X; moreover, d(x; y) = 0 if and only if x = y, • d(x; y) = d(y; x) for all x; y 2 X, and • d(x; y) ≤ d(x; z) + d(z; y) for all x; y; z 2 X. A metric space is a set X together with a metric d on it, and we will use the notation (X; d) for a metric space. Often, if the metric d is clear from context, we will simply denote the metric space (X; d) by X itself. -

Dynamics in Several Complex Variables: Endomorphisms of Projective Spaces and Polynomial-Like Mappings
Dynamics in Several Complex Variables: Endomorphisms of Projective Spaces and Polynomial-like Mappings Tien-Cuong Dinh and Nessim Sibony Abstract The emphasis of this introductory course is on pluripotential methods in complex dynamics in higher dimension. They are based on the compactness prop- erties of plurisubharmonic (p.s.h.) functions and on the theory of positive closed currents. Applications of these methods are not limited to the dynamical systems that we consider here. Nervertheless, we choose to show their effectiveness and to describe the theory for two large familiesofmaps:theendomorphismsofprojective spaces and the polynomial-like mappings. The first section deals with holomorphic endomorphisms of the projective space Pk.Weestablishthefirstpropertiesandgive several constructions for the Green currents T p and the equilibrium measure µ = T k. The emphasis is on quantitative properties and speed of convergence. We then treat equidistribution problems. We show the existence of a proper algebraic set E ,totally 1 invariant, i.e. f − (E )=f (E )=E ,suchthatwhena E ,theprobabilitymeasures, n "∈ equidistributed on the fibers f − (a),convergetowardstheequilibriummeasureµ, as n goes to infinity. A similar result holds for the restriction of f to invariant sub- varieties. We survey the equidistribution problem when points are replaced with varieties of arbitrary dimension, and discuss the equidistribution of periodic points. We then establish ergodic properties of µ:K-mixing,exponentialdecayofcorrela- tions for various classes of observables, central limit theorem and large deviations theorem. We heavily use the compactness of the space DSH(Pk) of differences of quasi-p.s.h. functions. In particular, we show that the measure µ is moderate, i.e. -

Convergence of Fourier Series
CONVERGENCE OF FOURIER SERIES KEVIN STEPHEN STOTTER CUDDY Abstract. This paper sets out to explore and explain some of the basic con- cepts of Fourier analysis and its applications. Convolution and questions of convergence will be central. An application to the isoperimetric inequality will conclude the paper. Contents 1. Introduction to Fourier Series 1 2. Convolution and Kernels 2 3. Criteria for Convergence 8 4. Isoperimetric Inequality 18 Acknowledgments 19 References 19 1. Introduction to Fourier Series It will be important for the reader to recall Euler's Formula: ix (1.1) e = cos(x) + i sin(x); 8x 2 R Throughout this paper, an \integrable" function should be interpreted as integrable in the Riemann sense as well as bounded. Definition 1.2. For an integrable, bounded function f :[a; b] ! C we can define, for any integer n, the nth Fourier coefficient 1 Z b f^(n) = f(x)e−2πinx=(b−a)dx: b − a a When there is no question about the function we are referring to we may write ^ P1 ^ 2πinx f(n) = an. From these coefficients we get the Fourier series S(x) = n=−∞ f(n)e (note that this sum may or may not converge). To denote that a Fourier series is associated to a function f we write 1 X f ∼ f^(n)e2πinx n=−∞ Definition 1.3. The N th partial sum of the Fourier series for f, where N is a PN ^ 2πinx=L positive integer, is given by SN (f)(x) = n=−N f(n)e . Date: DEADLINE AUGUST 26, 2012.