Master's Thesis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
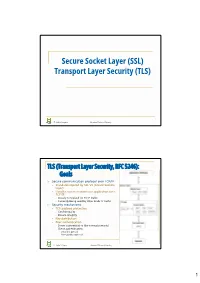
Secure Socket Layer (SSL) Transport Layer Security (TLS)
Secure Socket Layer (SSL) Transport Layer Security (TLS) © André Zúquete Advanced Network Security TLS (Transport Layer Security, RFC 5246): Goals w Secure communication protocol over TCP/IP ® Standard inspired by SSL V3 (Secure Sockets Layer) ® Handles secure sessions per application over TCP/IP • Initially conceived for HTTP traffic • Currently being used by other kinds of traffic w Security mechanisms ® TCP payload protection • Confidentiality • Stream integrity ® Key distribution ® Peer authentication • Server authentication (the normal scenario) • Client authentication • Usually a person • Not usually explored © André Zúquete Advanced Network Security 1 Change Handshake Alert IMAP, Cipher Protocol Protocol HTTP Spec. etc. IMAP, TLS/SSL: HTTP etc. Protocols Record Protocol w Handshake Protocol TCP ® Key distribution • Master secrets (48 bytes) • Computed with DH; or • Chose by the client, upload to the server encrypted with the server’s public key • Session keys • Computed from a master secret and two nonces exchanged ® Peer authentication • Asymmetric encryption with long-term or ephemeral keys • Public key certificates for long-term public keys w Record Protocol ® Handling of secure data records ® Compression, confidentiality, integrity control © André Zúquete Advanced Network Security TLS/SSL versions w SSL ® 1.0 ® 2.0: 1995, prohibited by RFC 6176 (2011) ® 3.0: 1996, RFC 6101 (2011), deprecated by RFC 7568 (2015) w TLS ® 1.0: 1999: RFC 2246 SSL BEAST (2011) ® 1.1: 2006: RFC 4346 ® 1.2: 2008: RFC 5246 ® 1.3: 2018: RFC 8446 © André -
ROADS and BRIDGES: the UNSEEN LABOR BEHIND OUR DIGITAL INFRASTRUCTURE Preface
Roads and Bridges:The Unseen Labor Behind Our Digital Infrastructure WRITTEN BY Nadia Eghbal 2 Open up your phone. Your social media, your news, your medical records, your bank: they are all using free and public code. Contents 3 Table of Contents 4 Preface 58 Challenges Facing Digital Infrastructure 5 Foreword 59 Open source’s complicated relationship with money 8 Executive Summary 66 Why digital infrastructure support 11 Introduction problems are accelerating 77 The hidden costs of ignoring infrastructure 18 History and Background of Digital Infrastructure 89 Sustaining Digital Infrastructure 19 How software gets built 90 Business models for digital infrastructure 23 How not charging for software transformed society 97 Finding a sponsor or donor for an infrastructure project 29 A brief history of free and public software and the people who made it 106 Why is it so hard to fund these projects? 109 Institutional efforts to support digital infrastructure 37 How The Current System Works 38 What is digital infrastructure, and how 124 Opportunities Ahead does it get built? 125 Developing effective support strategies 46 How are digital infrastructure projects managed and supported? 127 Priming the landscape 136 The crossroads we face 53 Why do people keep contributing to these projects, when they’re not getting paid for it? 139 Appendix 140 Glossary 142 Acknowledgements ROADS AND BRIDGES: THE UNSEEN LABOR BEHIND OUR DIGITAL INFRASTRUCTURE Preface Our modern society—everything from hospitals to stock markets to newspapers to social media—runs on software. But take a closer look, and you’ll find that the tools we use to build software are buckling under demand. -

Using Frankencerts for Automated Adversarial Testing of Certificate
Using Frankencerts for Automated Adversarial Testing of Certificate Validation in SSL/TLS Implementations Chad Brubaker ∗ y Suman Janay Baishakhi Rayz Sarfraz Khurshidy Vitaly Shmatikovy ∗Google yThe University of Texas at Austin zUniversity of California, Davis Abstract—Modern network security rests on the Secure Sock- many open-source implementations of SSL/TLS are available ets Layer (SSL) and Transport Layer Security (TLS) protocols. for developers who need to incorporate SSL/TLS into their Distributed systems, mobile and desktop applications, embedded software: OpenSSL, NSS, GnuTLS, CyaSSL, PolarSSL, Ma- devices, and all of secure Web rely on SSL/TLS for protection trixSSL, cryptlib, and several others. Several Web browsers against network attacks. This protection critically depends on include their own, proprietary implementations. whether SSL/TLS clients correctly validate X.509 certificates presented by servers during the SSL/TLS handshake protocol. In this paper, we focus on server authentication, which We design, implement, and apply the first methodology for is the only protection against man-in-the-middle and other large-scale testing of certificate validation logic in SSL/TLS server impersonation attacks, and thus essential for HTTPS implementations. Our first ingredient is “frankencerts,” synthetic and virtually any other application of SSL/TLS. Server authen- certificates that are randomly mutated from parts of real cer- tication in SSL/TLS depends entirely on a single step in the tificates and thus include unusual combinations of extensions handshake protocol. As part of its “Server Hello” message, and constraints. Our second ingredient is differential testing: if the server presents an X.509 certificate with its public key. -
Mac OS X Server Administrator's Guide
034-9285.S4AdminPDF 6/27/02 2:07 PM Page 1 Mac OS X Server Administrator’s Guide K Apple Computer, Inc. © 2002 Apple Computer, Inc. All rights reserved. Under the copyright laws, this publication may not be copied, in whole or in part, without the written consent of Apple. The Apple logo is a trademark of Apple Computer, Inc., registered in the U.S. and other countries. Use of the “keyboard” Apple logo (Option-Shift-K) for commercial purposes without the prior written consent of Apple may constitute trademark infringement and unfair competition in violation of federal and state laws. Apple, the Apple logo, AppleScript, AppleShare, AppleTalk, ColorSync, FireWire, Keychain, Mac, Macintosh, Power Macintosh, QuickTime, Sherlock, and WebObjects are trademarks of Apple Computer, Inc., registered in the U.S. and other countries. AirPort, Extensions Manager, Finder, iMac, and Power Mac are trademarks of Apple Computer, Inc. Adobe and PostScript are trademarks of Adobe Systems Incorporated. Java and all Java-based trademarks and logos are trademarks or registered trademarks of Sun Microsystems, Inc. in the U.S. and other countries. Netscape Navigator is a trademark of Netscape Communications Corporation. RealAudio is a trademark of Progressive Networks, Inc. © 1995–2001 The Apache Group. All rights reserved. UNIX is a registered trademark in the United States and other countries, licensed exclusively through X/Open Company, Ltd. 062-9285/7-26-02 LL9285.Book Page 3 Tuesday, June 25, 2002 3:59 PM Contents Preface How to Use This Guide 39 What’s Included -

Open Source Documentation Used in WAP4410N, Version 2.0.5.X
Open Source Used In WAP4410N 2.0.5.x This document contains the licenses and notices for open source software used in this product. With respect to the free/open source software listed in this document, if you have any questions or wish to receive a copy of the source code to which you are entitled under the applicable free/open source license(s) (such as the GNU Lesser/General Public License) , please contact us at http://www.cisco.com/go/smallbiz_opensource_request. In your requests please include the following reference number 78EE117C99-24342489 En ce qui a trait au logiciel gratuit ou à exploitation libre figurant dans ce document, si vous avez des questions ou souhaitez recevoir une copie du code source, auquel vous avez droit en vertu des licences gratuites ou d'exploitation libre applicables (telles que licences GNU Lesser/General Public), veuillez communiquer avec nous à l'adresse http://www.cisco.com/go/smallbiz_opensource_request. Dans vos demandes, veuillez inclure le numéro de référence 78EE117C99-24342489 Contents 1.1 ag7100 1.0 1.1.1 Available under license 1.2 binutils 2.16.1 1.2.1 Available under license 1.3 busybox 1.1.0 1.3.1 Available under license 1.4 ccache 2.4 78-20798-01 Open Source Used In WAP4410N 2.0.5.x 1 1.4.1 Available under license 1.5 dhcp 0.1 1.5.1 Available under license 1.6 gcc 3.4.4 1.6.1 Available under license 1.7 genext2fs 1.3 1.7.1 Available under license 1.8 hostapd 0.5.9 1.8.1 Available under license 1.9 libiconv 1.8 1.9.1 Available under license 1.10 libupnp 1.2.1 1.10.1 Available under license -
Post-Quantum Authentication in Openssl with Hash-Based Signatures
Recalling Hash-Based Signatures Motivations for Cryptographic Library Integration Cryptographic Libraries OpenSSL & open-quantum-safe XMSS Certificate Signing in OpenSSL / open-quantum-safe Conclusions Post-Quantum Authentication in OpenSSL with Hash-Based Signatures Denis Butin, Julian Wälde, and Johannes Buchmann TU Darmstadt, Germany 1 / 26 I Quantum computers are not available yet, but deployment of new crypto takes time, so transition must start now I Well established post-quantum signature schemes: hash-based cryptography (XMSS and variants) I Our goal: make post-quantum signatures available in a popular security software library: OpenSSL Recalling Hash-Based Signatures Motivations for Cryptographic Library Integration Cryptographic Libraries OpenSSL & open-quantum-safe XMSS Certificate Signing in OpenSSL / open-quantum-safe Conclusions Overall Motivation I Networking requires authentication; authentication is realized by cryptographic signature schemes I Shor’s algorithm (1994): most public-key cryptography (RSA, DSA, ECDSA) breaks once large quantum computers exist I Post-quantum cryptography: public-key algorithms thought to be secure against quantum computer attacks 2 / 26 Recalling Hash-Based Signatures Motivations for Cryptographic Library Integration Cryptographic Libraries OpenSSL & open-quantum-safe XMSS Certificate Signing in OpenSSL / open-quantum-safe Conclusions Overall Motivation I Networking requires authentication; authentication is realized by cryptographic signature schemes I Shor’s algorithm (1994): most public-key -

Using Unsniff Network Analyzer to Analyze SSL / TLS
Whitepaper – SSL / TLS Analysis using Unsniff Network Analyzer Whitepaper : Using Unsniff Network Analyzer to analyze SSL / TLS A number of applications today use SSL and TLS as a security layer. Unsniff allows authorized users to analyze these applications by decrypting the SSL/TLS streams in real time. This is done without interrupting the SSL streams in any way. Unsniff can also strip out the SSL/TLS layer completely and analyze the application protocols as if the security layer never existed. For example: If you are working with a secure web server, you can analyze the HTTPS protocol, including the ability to reconstruct complete web pages. References : RFC2246 (TLS 1.0), RFC2459 (X.509v3), PKCS Standards (RSA Website) Feature overview Working with PDUs and Streams Decrypting SSL/TLS Analyzing upper layer protocols Howto : Analyzing a secure Microsoft IIS web server Howto : Analyzing a secure Apache web server Howto : Analyzing protocols tunneled via stunnel FAQ 1/12 © Unleash Networks, All rights reserved Whitepaper – SSL / TLS Analysis using Unsniff Network Analyzer Feature Overview Unsniff shows SSL/TLS records as separate entities in the PDU sheet irrespective of SSL records how they were carried at the link layer. Stream Monitor entire SSL / TLS sessions in real time via the Streams sheet. analysis Provided you have the servers private key material you can decrypt SSL / TLS Decryption sessions in real time. Most of the popular ciphers are supported. Advanced Unsniff supports SSL / TLS features such as session reuse and cipher renegotiation. Decryption SSL/TLS only acts as a transport layer for higher layer protocols. Ultimately we are interested in the analysis of higher layer protocols such as HTTP, LDAP etc. -

You Really Shouldn't Roll Your Own Crypto: an Empirical Study of Vulnerabilities in Cryptographic Libraries
You Really Shouldn’t Roll Your Own Crypto: An Empirical Study of Vulnerabilities in Cryptographic Libraries Jenny Blessing Michael A. Specter Daniel J. Weitzner MIT MIT MIT Abstract A common aphorism in applied cryptography is that cryp- The security of the Internet rests on a small number of open- tographic code is inherently difficult to secure due to its com- source cryptographic libraries: a vulnerability in any one of plexity; that one should not “roll your own crypto.” In par- them threatens to compromise a significant percentage of web ticular, the maxim that complexity is the enemy of security traffic. Despite this potential for security impact, the character- is a common refrain within the security community. Since istics and causes of vulnerabilities in cryptographic software the phrase was first popularized in 1999 [52], it has been in- are not well understood. In this work, we conduct the first voked in general discussions about software security [32] and comprehensive analysis of cryptographic libraries and the vul- cited repeatedly as part of the encryption debate [26]. Conven- nerabilities affecting them. We collect data from the National tional wisdom holds that the greater the number of features Vulnerability Database, individual project repositories and in a system, the greater the risk that these features and their mailing lists, and other relevant sources for eight widely used interactions with other components contain vulnerabilities. cryptographic libraries. Unfortunately, the security community lacks empirical ev- Among our most interesting findings is that only 27.2% of idence supporting the “complexity is the enemy of security” vulnerabilities in cryptographic libraries are cryptographic argument with respect to cryptographic software. -
CS670: Network Security
Cristina Nita-Rotaru CS670: Network security IPsec. TLS. Sources 1. Many slides courtesy of Christo Wilson and Wil Robertson 2. IPSec Key management based on slides from B. LaMacchia 3. Analysis of the HTTPS Certificate Ecosystem, IMC 2013: https://jhalderm.com/pub/papers/https-imc13.pdf 4. Analysis of SSL certificate reissues and revocations in the wake of Heartbleed, IMC 2014: http://www.ccs.neu.edu/home/cbw/pdf/imc254-zhang.pdf 2 IPSec; TLS 1: Protecting IP: IPsec OSI/ISO Model Application Application Presentation Presentation Session Session Transport Transport Network Network Data Link Data Link Physical Layer Physical Layer 4 IPSec; TLS IPsec design goals } Design philosophy: applications cannot be trusted to implement end-to-end security properly and security should be built into the network itself } Transparent to applications (below transport layer ) } Goal: Facilitate direct IP connectivity between sensitive hosts through untrusted networks } It is designed to be extremely flexible } Different crypto algorithms and key exchange supported } Different security services compositions } Different granularities of protection 5 IPSec; TLS Security goals } IPsec provides: } access control } integrity } data origin authentication } rejection of replayed packets } confidentiality } IETF IPSEC Working Group } Documented in RFCs and Internet drafts 6 IPSec; TLS Security and deployment mechanisms } Operates based on security associations } Deployment: } Transport-mode: encapsulates an upper-layer protocol (e.g. TCP or UDP) and preapends an -

Security Issues in the Diffie-Hellman Key Agreement Protocol
Security Issues in the Diffie-Hellman Key Agreement Protocol Jean-Franc¸ois Raymond and Anton Stiglic Zero-Knowledge Systems Inc. jfr, anton ¡ @zeroknowledge.com Abstract Diffie-Hellman key agreement protocol [20] implementations have been plagued by serious security flaws. The attacks can be very subtle and, more often than not, have not been taken into account by protocol designers. In this summary we discuss both theoretical attacks against the Diffie-Hellman key agreement pro- tocol and attacks based on implementation details . It is hoped that computer se- curity practitioners will obtain enough information to build and design secure and efficient versions of this classic key agreement protocol. 1 Introduction In their landmark 1976 paper “New Directions in Cryptography”[20], Diffie and Hell- man present a secure key agreement protocol that can be carried out over public com- munication channels. Their protocol is still widely used to this day. Even though the protocol seems quite simple, it can be vulnerable to certain attacks. As with many cryptographic protocols, the Diffie-Hellman key agreement protocol (DH protocol) has subtle problems that cryptographers have taken many years to discover. This vulnerability is compounded by the fact that programmers often do not have a proper understanding of the security issues. In fact, bad implementations of crypto- graphic protocols are, unfortunately, common [2]. In this work, we attempt to give a comprehensive listing of attacks on the DH proto- col. This listing will, in turn, allow us to motivate protocol design decisions. Note that throughout this presentation emphasis is placed on practice. After reading this paper, one might not have an extremely detailed understanding of previous work and theoret- ical problems, but should have a very good idea about how to securely implement the DH protocol in different settings. -
Proceedings of the 14Th Systems Administration Conference (LISA 2000)
USENIX Association Proceedings of the 14th Systems Administration Conference (LISA 2000) New Orleans, Louisiana, USA December 3– 8, 2000 THE ADVANCED COMPUTING SYSTEMS ASSOCIATION © 2000 by The USENIX Association All Rights Reserved For more information about the USENIX Association: Phone: 1 510 528 8649 FAX: 1 510 548 5738 Email: [email protected] WWW: http://www.usenix.org Rights to individual papers remain with the author or the author's employer. Permission is granted for noncommercial reproduction of the work for educational or research purposes. This copyright notice must be included in the reproduced paper. USENIX acknowledges all trademarks herein. Automating Request-based Software Distribution Chris Hemmerich – Indiana University ABSTRACT Request-based distribution of software applications over a network is a difficult problem that many organizations face. While several programs address this issue, many lack features required for more sophisticated exports, and more complex solutions usually have a very limited scope. Managing these exports by hand is usually a time consuming and error-prone task. We were in such a situation when we developed the Automated Netdist program a year ago. Automated Netdist provides an automated mechanism for system administrators to request and receive software exports with an immediate turnaround. The system provides a simple user interface, secure authentication, and both user and machine based authentication. Each of these is configurable on a package-by-package basis for flexibility. Netdist is a modular service. The user interface, authentication and authorization are independent of the export protocol. We are currently distributing via NFS, but adding an additional protocol is as simple as writing a script to perform the export and plugging it into Netdist. -
Chapter 11: Building Secure Software Lars-Helge Netland [email protected] 10.10.2005 INF329: Utvikling Av Sikre Applikasjoner Overview
Programming with cryptography Chapter 11: Building Secure Software Lars-Helge Netland [email protected] 10.10.2005 INF329: Utvikling av sikre applikasjoner Overview Intro: The importance of cryptography The fundamental theorem of cryptography Available cryptographic libraries Java code examples One-time pads Summary 2 Intro Cryptography ‘kryptos’(=hidden) ‘graphein’ (=to write) Layman description: the science of encrypting and decrypting text 3 The Code Book Simon Singh Highly accessible introduction to cryptography Retails at $10 (free at public libraries) Includes crypto challenges 4 Crypto: Why is it important?(I) Basic services: confidentiality encrypted text only viewable by the intended recipient integrity assurance to the involved parties that the text was not tampered with in transit authentication proof of a binding of an identity to an identification tag (often involves trusted third parties) 5 Crypto: Why is it important?(II) Basic services (continued) authorization restricting access to resources (often involves authentication) digital signatures electronic equivalent of hand-written signatures non-repudiation 6 The fundamental theorem of cryptography Do NOT develop your own cryptographic primitives or protocols The history of cryptography repeatedly shows how “secure” systems have been broken due to unknown vulnerabilities in the design If you really have to: PUBLISH the algorithm 7 Examples on how ciphers have been broken Early substitution ciphers broken by exploiting the relative frequency of letters WW2: The enigma machine