Integrated Violin Pickup, Effects, and Amplifier by Thanh N
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Audio Amplifier Circuit
ECE 2C Laboratory Manual 1a Audio Amplifier Circuit Overview In the first part of lab#1 you will construct a low-power audio amplifier/speaker driver based on the LM386 IC from National Semiconductor. The audio amplifier will be a self- contained, battery-operated component. In the second part of the lab you will construct a microphone circuit using a compact electret condenser microphone cartridge. These circuit modules are important building blocks of many audio communications systems, and will be used in our ultrasonic transceiver system. By studying this document and experimenting with the components and circuits in the lab, pay attention to the following: ■ Electrical characteristics of audio speakers ■ Characteristics of condenser microphones ■ Design of single-supply battery-operated op-amp circuits ■ Use of diode limiters/clamps for input protection ■ Use of active filters for tone control ■ Choice of AC coupling capacitors We will discuss the analytical aspects of active filter design in lecture we will see them in action again in our IR receiver system. Remember, the objective here is not simply to create a working circuit, it is to learn about circuits! So, as you progress through the lab, try to understand the role of each component, and how the choice of component value may influence the operation of the circuit. Please tinker with component values, that is an especially valuable way to learn. Ask yourself questions such as: Why is this resistor here? Why does it have this resistance value? Why is this blocking capacitor 1μF instead of 0.1μF or 10μF or 100μF? Why was this particular op- amp chosen? It is only when you can answer such questions that you will truly understand the labs and progress towards designing your own circuits. -

Low Cost IC Stereo Receiver Ainlde O Sueayrsosblt O S Faycrutydsrbd Ocrutptn Iessaeipidadntoa Eevstergta N Iewtotntc Ocag Adcrutyadspecifications
Low Cost IC Stereo Receiver AN-147 National Semiconductor Low Cost IC Application Note 147 Stereo Receiver Jim Sherwin June 1975 INTRODUCTION FM AND FM STEREO The recent availability of a broad line of truly high-perform- A preassembled front-end was selected as the cost-effec- ance consumer integrated circuits makes it possible to con- tive approach to minimum parts count and minimum factory struct a high quality, low noise, low distortion and low cost adjustments. This model features an FET input stage pro- AM/FM/Stereo receiver. Design emphasis is placed on a viding excellent distortion performance. High selectivity is high level of performance, minimum factory adjustments obtained through the use of two cascaded ceramic filters and low parts count. As such, the receiver has immediate yielding an approximate 6-pole response with less than 12 applications to table-top, high-fidelity, automotive and com- dB insertion loss. munications markets. The LM3089 FM IF System does all the major functions Provisions are included for the addition of a ceramic phono necessary for FM processing, including a three stage ampli- unit as well as a tapehead amplifier allowing inclusion of fier/limiter and balanced product detector, as well as an eight-track or cassette transport systems. Complete tone audio preamplifier. A single quadrature coil was used for control circuitry is provided offering both boost and cut of ease of ailgnment; yielding recovered audio with THD less Bass and Treble frequencies. Left and right channel Bal- than 0.5%, however a double coil may be used to diminish ance, and system Volume complete the manual front-panel THD to 0.1% if required. -

An Audio Amplifier
EE43EE 43/100 Fall 2005 - Final – Project Project: 1: Audio Audio Amplifier, Amplifier, Part Part II II EE 43/100EE 43 F PINALROJECTPROJECT1: AN:AAUDION AUDIOAMPLIFIERAMPLIFIER Part 2: Audio Amplifier Lab Guide In this lab we’re going to extend what you did last time. We’re going to use your AC to DC converter to power an audio amplifier. Important: we’re going to be playing around with the audio amplifier in this lab, and it’s nice to use a real audio source to play with. Bring in an audio player from home. For example, bring a discman, walkman, iPod, MP3 player, etc. 1 Tips For Lab Before you begin, one simple bit of advise: build clean, neat circuits. Use the shortest wire possible, use the power rails on your board instead of stringing 5V and ground everywhere, and be methodical when you wire so that you (and your GSI) can make sense of it. If you build your circuit in a strange, non- intuitive way, your GSI will not be able to help you debug it. Figure 1 shows an example of a well-built circuit. 2 Power Supply You should have saved your AC to DC converter circuit from last week. We’ll use that circuit to power the audio amplifier we build in this lab. Modify your circuit to look like Figure 2. Notice that the load resistor has been removed, and an LED has been added. This LED is simply an indicator that will tell you when the board is powered up. Since we’re going to be using delicate ICs in this lab, you should only touch them when the power is turned off. -

Operator Adjustable Equalizers: an Overview
RaneNote OPERATOR ADJUSTABLE EQUALIZERS: AN OVERVIEW Operator Adjustable Introduction Equalizers: An Overview This paper presents an overview of operator adjust- able equalizers in the professional audio industry. The • Equalizer History term “operator adjustable equalizers” is no doubt a bit vague and cumbersome. For this, the author apolo- • Industry Choices gizes. Needed was a term to differentiate between fixed equalizers and variable equalizers. • Terminology & Definitions Fixed equalizers, such as pre-emphasis and de-em- phasis circuits, phono RIAA and tape NAB circuits, • Active & Passive and others, are subject matter unto themselves, but not the concern of this survey. Variable equalizers, how- • Graphics & Parametrics ever, such as graphics and parametrics are very much the subject of this paper, hence the term, “operator • Constant-Q & Proportional-Q adjustable equalizers.” That is what they are—equal- izers adjustable by operators—as opposed to built-in, • Interpolating & Combining non-adjustable, fixed circuits. Without belaboring the point too much, it is impor- • Phase Shift Examples tant in the beginning to clarify and use precise termi- nology. Much confusion surrounds users of variable • References equalizers due to poorly understood terminology. What types of variable equalizers exist? Why so many? Which one is best? What type of circuits pre- vail? What kind of filters? Who makes what? Hopefully, the answers lie within these pages, but first, a little history. Dennis Bohn Rane Corporation RaneNote 122 © 1990 Rane Corporation Reprinted with permission from the Audio Engineering Society from The Proceedings of the AES 6th Interna- tional Conference: Sound Reinforcement, 1988 May 5-8, Nashville. Equalizers-1 A Little History band signal loss and then reducing the loss on a band- No really big histories exist regarding variable equal- by-band basis. -

PIC Controlled Two-Band Stereo Audio Equalizer
PIC Controlled Two-Band Stereo Audio Equalizer By Tim Brown Senior Project Electrical Engineering Department California Polytechnic State University San Luis Obispo Fall 2009 Table of Contents List of Tables ............................................................................................................................................... 3 List of Figures .............................................................................................................................................. 3 Acknowledgements ..................................................................................................................................... 4 Abstract ........................................................................................................................................................ 5 Introduction ................................................................................................................................................. 6 Background .................................................................................................................................................. 7 Requirements .............................................................................................................................................. 8 Design ........................................................................................................................................................... 9 System Design ........................................................................................................................................ -
Automatic Loudness Control Circuit
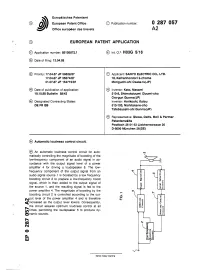
Europaisches Patentamt J) European Patent Office 0 Publication number: 0 287 057 Office europeen des brevets A2 © EUROPEAN PATENT APPLICATION © Application number: 88105872.1 © IntCI.4: H03G 5/16 © Date of filing: 13.04.88 ® Priority: 17.04.87 JP 58832/87 © Applicant: SANYO ELECTRIC CO., LTD. 17.04.87 JP 95574/87 18, Keihanhondori 2-chome 01.07.87 JP 164719/87 Moriguchi-shi Osaka-fu(JP) © Date of publication of application: @ Inventor: Kato, Masami 19.10.88 Bulletin 88/42 510-8, Shimokoizumi Oizumi-cho Ora-gun Gunma(JP) © Designated Contracting States: Inventor: Horikoshi, Katsu OE FR GB 513-193, Nishitakane-cho Tatebayashi-shi Gunma(JP) © Representative: Glawe, Delfs, Moll & Partner Patentanwalte Postfach 26 01 62 Liebherrstrasse 20 D-8000 MUnchen 26(DE) Automatic loudness control circuit. © An automatic loudness control circuit for auto- matically controlling the magnitude of boosting of the low-frequency component of an audio signal in ac- cordance with the output signal level of a power amplifier 4 for driving a loudspeaker 5. The low- frequency component of the output signal from an audio signal source 1 is boosted by a low frequency boosting circuit 2 to prepare a low-frequency boost signal, which is then added to the output signal of the source 1, and the resulting signal is fed to the power amplifier 4. The magnitude of boosting by the boosting circuit 2 is controlled according to the out- ^put level of the power amplifier 4 and is therefore ^increased as the output level lowers. Consequently, the circuit assures optimum loudness control at all [Jj times, permitting the loudspeaker 5 to produce dy- Qnamic sounds. -

An Audio Circuit Collection, Part 1
Texas Instruments Incorporated Amplifiers: Op Amps An audio circuit collection, Part 1 By Bruce Carter Advanced Analog Products, Op Amp Applications Introduction connected to VCC+, and ground is connected to VCC– or This is the first of two articles on audio circuits. New oper- GND. A virtual ground, halfway between the positive sup- ational amplifiers from Texas Instruments have excellent ply voltage and ground, is the “ground” reference for the audio performance and can be used in high-performance input and output voltages. Voltage swings above and below applications. this virtual ground to VOM±. Some newer op amps have There have been many collections of op amp audio circuits different high- and low-voltage rails, which are specified in in the past, but all of them focus on split-supply circuits. data sheets as VOH and VOL, respectively. Often, the designer who has to operate a circuit from a 5 V is a common value for single supplies, but voltage single supply does not know how to perform the conversion. rails are becoming lower, with 3 V and even lower voltages Single-supply operation requires a little more care than becoming common. Because of this, single-supply op amps split-supply circuits. The designer should read and under- are often “rail-to-rail” devices to avoid losing dynamic stand the introductory material. range. “Rail-to-rail” may or may not apply to both the input and output stages. Be aware that even though a Split supply vs. single supply device may be specified as “rail-to-rail,” some specifica- All op amps have two power pins. -

A Solar Powered Audio Amplifier with DSP Effects
connecting to the power grid is difficult or impossible. Unplugged: A solar powered This is the main goal of the Unplugged sound system. audio amplifier with DSP The motivation to take on this enterprise comes from the personal desire of team members to be able to play effects musical instruments or just enjoy music from a laptop computer or iPod without the need of running long and Hugo Castellanos, Gretchen Rivera, Sandra cumbersome extension cords. The design for the Munoz Unplugged sound system includes one input for either a low impedance microphone, or a musical instrument such School of Electrical Engineering and Computer as electro-acoustic guitars and an 1/8 inch connector Science, University of Central Florida, Orlando, capable of interfacing a laptop computer or MP3 player. Florida, 32816-2450 The system’s versatility is further enhanced with the inclusion of the BTSE-16FX DSP effects module. This module will let the user implement one of sixteen different audio effects in the audio source of their choice. At the Abstract — This paper presents the implementation of a core of this design is the TDA7396 amplifier chip which is solar powered portable audio amplifier as well as the design capable of delivering a power output of 45 Watts RMS approach taken to implement its audio, power management and monitoring subsystems. The ultimate function of this into a 4 Ω speaker. The whole system is powered by a 12 device is to provide individuals with a reliable and easy to use Volt 5 ah SLA battery that is trickle charged by a 20 Watt audio amplifier that does not require mains power. -

Audio Tone Control This Worksheet and All Related Files Are Licensed Under the Creative Commons Attribution Lice
Design Project: Audio tone control This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/, or send a letter to Creative Commons, 559 Nathan Abbott Way, Stanford, California 94305, USA. The terms and conditions of this license allow for free copying, distribution, and/or modification of all licensed works by the general public. Your project is to research the schematic diagram and component values for an audio tone control circuit (bass and treble controls), then build one in a nice enclosure. There are plenty of resources on the internet for you to research, as well as many good textbooks on audio circuitry for you to read. If you are a musician, you may want to consider building a tone control for your electric instrument (electric guitar, electric violin or viola, etc.). If you like to listen to portable music devices, you may want to consider building a stereo tone control (using double-ganged potentiometers so both channels have the same tone) for your portable music player. Deadlines (set by instructor): • Project design completed: • Components purchased: • Working prototype: • Finished system: • Full documentation: 1 Questions Question 1 Suppose you were installing a high-power stereo system in your car, and you wanted to build a simple filter for the ”tweeter” (high-frequency) speakers so that no bass (low-frequency) power is wasted in these speakers. Modify the schematic diagram below with a filter circuit of your choice: "Tweeter" "Tweeter" Amplifier left right "Woofer" "Woofer" Hint: this only requires a single component per tweeter! file 00613 Question 2 Examine the following schematic diagram for an audio tone control circuit: Source Vout Determine which potentiometer controls the bass (low frequency) tones and which controls the treble (high frequency) tones, and explain how you made those determinations. -
Theoretical Analysis and Design of Analog Distortion Circuitry
Rochester Institute of Technology RIT Scholar Works Theses 5-2020 Theoretical Analysis and Design of Analog Distortion Circuitry Daniel Saber [email protected] Follow this and additional works at: https://scholarworks.rit.edu/theses Recommended Citation Saber, Daniel, "Theoretical Analysis and Design of Analog Distortion Circuitry" (2020). Thesis. Rochester Institute of Technology. Accessed from This Master's Project is brought to you for free and open access by RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. THEORETICAL ANALYSIS AND DESIGN OF ANALOG DISTORTION CIRCUITRY by DANIEL SABER GRADUATE PAPER Submitted in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE in Electrical Engineering Approved by: Mr. Mark A. Indovina, Senior Lecturer Graduate Research Advisor, Department of Electrical and Microelectronic Engineering Dr. Sohail A. Dianat, Professor Department Head, Department of Electrical and Microelectronic Engineering DEPARTMENT OF ELECTRICAL AND MICROELECTRONIC ENGINEERING KATE GLEASON COLLEGE OF ENGINEERING ROCHESTER INSTITUTE OF TECHNOLOGY ROCHESTER,NEW YORK MAY, 2020 I dedicate this work to my father Dr. Eli Saber, my mother Debra Saber, and my brothers Paul and Joseph Saber. Declaration I hereby declare that except where specific reference is made to the work of others, that all content of this Graduate Paper are original and have not been submitted in whole or in part for consideration for any other degree or qualification in this, or any other University. This Graduate Project is the result of my own work and includes nothing which is the outcome of work done in collaboration, except where specifically indicated in the text. -

Baxandall Tone Control Revisited Improvements for Greater flexibility in Tailoring Audio Signals by M
Wireless World, September 1974 341 Baxandall tone control revisited Improvements for greater flexibility in tailoring audio signals by M. V. Thomas, B.A. The main disadvantage of the Baxandall tone control circuit is that if boost and cut are required at a particular frequency a much greater effect occurs at the extremes of the audio range. Modifications are described to limit the degree of this effect. The Baxandall configuration has for some time been the almost universal choice of audio amplifier manufacturersfor their tone control circuits. This is due in no small measure to its simplicity of construction and ease of use, and it is difficult to envisage any improvement of the circuit whilst re- taining only two controls. However, once a decision to increase the number of con- trols is made, the field becomes wide open, the most obvious development being to have each control affecting the level of a limited band of frequencies. Such circuits are obviously much more elaborate than the basic Baxandall type, and require care- ful design to prevent excessive interaction between the controls. This article describes a modification to the basic Baxandall cir- cuit which greatly increases its versatility whilst maintaining its simplicity. The main disadvantage of the basic circuit is that it has its greatest effect at the extremes of the audio range, as shown Fig. 1. Idealised responses of the Baxandall-type tone control circuit. in Fig. 1. For example, if a 6dB boost is required at 4kHz, one must simultaneously tolerate a much greater boost of perhaps 18dB at 16kHz. Furthermore, the turnover have a significant effect (capacitor C3 is frequency of the bass control depends often replaced by two capacitors, one at on its setting, but this does not apply to each end of the track of the treble control, the treble control! This effect is also shown but the effect is basically the same). -

NTE7072 Integrated Circuit Dual DC Controlled Potentiometer Circuit
NTE7072 Integrated Circuit Dual DC Controlled Potentiometer Circuit Description: The NTE7072 is a monolithic integrated circuit designed for use as a volume and tone control circuit in stereo amplifiers. This dual tandem potentiometer IC consists of two ganged pairs of electronic potentiometers with eight inputs connected via impedance converters, and the four outputs driving individual operational amplifiers. The setting of each electronic potentiometer pair is controlled by an individual DC control voltage. The potentiometers operate by current division between the arms of cross–coupled long–tailed pairs. The current division factor is determined by the level and polarity of the DC control voltage with respect to an externally available reference level of half the supply volt- age. Since the electronic potentiometers are adjusted by a DC control voltage, each pair can be con- trolled by single linear potentiometers which can be located in any position dictated by the equipment styling. Since the input and feedback impedances around the operational amplifier gain blocks are external, the NTE7072 can perform bass/treble and volume/loudness control. It also can be used as a low–level fader to control the sound distribution between the front and rear loudspeakers in car radio installations. Features: D High impedance inputs to both ‘ends’ of each electronic potentiometer D Ganged potentiometers track within 0.5dB D Electronic rejection of supply ripple D Internally–generated reference level available externally so that the control voltage