Introduction to Land Navigation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Astrodynamics
Politecnico di Torino SEEDS SpacE Exploration and Development Systems Astrodynamics II Edition 2006 - 07 - Ver. 2.0.1 Author: Guido Colasurdo Dipartimento di Energetica Teacher: Giulio Avanzini Dipartimento di Ingegneria Aeronautica e Spaziale e-mail: [email protected] Contents 1 Two–Body Orbital Mechanics 1 1.1 BirthofAstrodynamics: Kepler’sLaws. ......... 1 1.2 Newton’sLawsofMotion ............................ ... 2 1.3 Newton’s Law of Universal Gravitation . ......... 3 1.4 The n–BodyProblem ................................. 4 1.5 Equation of Motion in the Two-Body Problem . ....... 5 1.6 PotentialEnergy ................................. ... 6 1.7 ConstantsoftheMotion . .. .. .. .. .. .. .. .. .... 7 1.8 TrajectoryEquation .............................. .... 8 1.9 ConicSections ................................... 8 1.10 Relating Energy and Semi-major Axis . ........ 9 2 Two-Dimensional Analysis of Motion 11 2.1 ReferenceFrames................................. 11 2.2 Velocity and acceleration components . ......... 12 2.3 First-Order Scalar Equations of Motion . ......... 12 2.4 PerifocalReferenceFrame . ...... 13 2.5 FlightPathAngle ................................. 14 2.6 EllipticalOrbits................................ ..... 15 2.6.1 Geometry of an Elliptical Orbit . ..... 15 2.6.2 Period of an Elliptical Orbit . ..... 16 2.7 Time–of–Flight on the Elliptical Orbit . .......... 16 2.8 Extensiontohyperbolaandparabola. ........ 18 2.9 Circular and Escape Velocity, Hyperbolic Excess Speed . .............. 18 2.10 CosmicVelocities -

View and Print This Publication
@ SOUTHWEST FOREST SERVICE Forest and R U. S.DEPARTMENT OF AGRICULTURE P.0. BOX 245, BERKELEY, CALIFORNIA 94701 Experime Computation of times of sunrise, sunset, and twilight in or near mountainous terrain Bill 6. Ryan Times of sunrise and sunset at specific mountain- ous locations often are important influences on for- estry operations. The change of heating of slopes and terrain at sunrise and sunset affects temperature, air density, and wind. The times of the changes in heat- ing are related to the times of reversal of slope and valley flows, surfacing of strong winds aloft, and the USDA Forest Service penetration inland of the sea breeze. The times when Research NO& PSW- 322 these meteorological reactions occur must be known 1977 if we are to predict fire behavior, smolce dispersion and trajectory, fallout patterns of airborne seeding and spraying, and prescribed burn results. ICnowledge of times of different levels of illumination, such as the beginning and ending of twilight, is necessary for scheduling operations or recreational endeavors that require natural light. The times of sunrise, sunset, and twilight at any particular location depend on such factors as latitude, longitude, time of year, elevation, and heights of the surrounding terrain. Use of the tables (such as The 1 Air Almanac1) to determine times is inconvenient Ryan, Bill C. because each table is applicable to only one location. 1977. Computation of times of sunrise, sunset, and hvilight in or near mountainous tersain. USDA Different tables are needed for each location and Forest Serv. Res. Note PSW-322, 4 p. Pacific corrections must then be made to the tables to ac- Southwest Forest and Range Exp. -
Silva Manual- Mirror Sighting Compasses
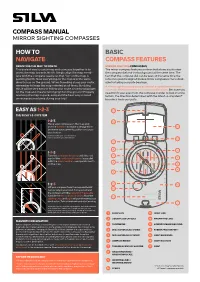
COMPASSHOW MANUAL TO MIRROR SIGHTING COMPASSES NAVIGATEHOW TO BASIC NAVIGATE COMPASS FEATURES HOWORIENTING TO THE MAP TO NORTH MIRROR SIGHTING COMPASSES EASYThe easiest way to use a map and compass AS together is to The mirror compass features a mirror that allows you to view orient the map towards North. Simply align the map merid- the compass dial and the background at the same time. The ians with the compass needle so that “up” on the map is fact that the compass dial can be seen at the same time the pointing North. Now everything on the map is in the same reference point is aligned makes mirror compasses more desir- NAVIGATEdirection as on the ground. When travelling along your route, able for taking accurate bearings. remember to keep the map oriented at all times. By doing A mirror-sighting compass is at its best in open terrain where 1-2-3this it will be very easy to follow your route since turning right you must determine direction over long distances. Because you on the map also means turning right on the ground! Properly needn’t lift your eyes from the compass in order to look into the orienting1-2-3 the map is quick, easy1-2 and-3 the best way to avoid1-2- 3 terrain, the direction determined with the Silva 1-2-3 System® HOW TOunnecessaryPlace your compass mistakes on the map duringTurn your the compass trip! housing until the Lift your compass frombecomes the map more accurate. and use the baseline to make a red part of the north/south arrow and hold it horizontally in your EASYstraight line between AS your current is parallel with the map meridians, hand. -

Environmental Geocaching: Learning Through Nature and Technology
WSFNR-20-67A September 2020 ENVIRONMENTAL GEOCACHING: LEARNING THROUGH NATURE AND TECHNOLOGY Brady Self, Associate Extension Professor, Department of Forestry, Mississippi State University Jason Gordon, Assistant Professor, Warnell School of Forestry & Natural Resources, University of Georgia Parents, natural resource professionals and enthusiasts, and youth coordinators often find themselves at a loss when trying to encour- age younger generations to take up outdoor pastimes. The allure of electronic technology, team sports, combined with time availability of parents sometimes limits overall involve- ment of today’s youth in more traditional outdoor activities. In this fast-paced world, learning about nature and what occurs in the forest seems to be losing ground when competing for adolescents’ interest and time. The good news is that there are still many op- portunities to involve youth in the outdoors. The game of geocaching provides one of these opportunities. Geocaching offers learning and fun while spending time in nature. Geocaching is an outdoor treasure hunting game that operates much like the scavenger hunting that many parents and grandparents remember from their youth. The game adds the use of GPS technology (either a dedi- cated receiver unit, or more commonly, a GPS-enabled smartphone) to guide players to locations where individual geocaches are hidden. Clues are then used to search for the geocache. Geocaches can be selected or created with a theme focused on learning about forests, wildlife, and other natural resources. These experiences are then shared online in the geocaching community. The overall objective of the activity is to guide participants to places of significance where they have the opportu- nity to learn something about that particular location or geocache topic. -

Geodetic Position Computations
GEODETIC POSITION COMPUTATIONS E. J. KRAKIWSKY D. B. THOMSON February 1974 TECHNICALLECTURE NOTES REPORT NO.NO. 21739 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. GEODETIC POSITION COMPUTATIONS E.J. Krakiwsky D.B. Thomson Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton. N .B. Canada E3B5A3 February 197 4 Latest Reprinting December 1995 PREFACE The purpose of these notes is to give the theory and use of some methods of computing the geodetic positions of points on a reference ellipsoid and on the terrain. Justification for the first three sections o{ these lecture notes, which are concerned with the classical problem of "cCDputation of geodetic positions on the surface of an ellipsoid" is not easy to come by. It can onl.y be stated that the attempt has been to produce a self contained package , cont8.i.ning the complete development of same representative methods that exist in the literature. The last section is an introduction to three dimensional computation methods , and is offered as an alternative to the classical approach. Several problems, and their respective solutions, are presented. The approach t~en herein is to perform complete derivations, thus stqing awrq f'rcm the practice of giving a list of for11111lae to use in the solution of' a problem. -

Caliper Abuse for Beginners a Guide to Quick and Accurate Layout Using Digital Calipers
Caliper Abuse for Beginners A Guide to Quick and Accurate Layout Using Digital Calipers charles z guan productions 21 Mar 2010 In your 2.007 kit, you have been provided with a set of 6” (150mm) digital calipers. You should use these not only for measuring and ascertaining dimensions of parts, but for accurate positioning of holes and other features when manually fabricating a part. Marking out feature positions and part dimensions using a standard ruler is often the first choice for students unfamiliar with engineering tools. This method yields marginal results and usually results in parts which need filing, sanding, or other “one-off” fitting. This document is intended to exposit a fairly common but usually unspoken shortcut that balances time spent laying out a part for fabrication with reasonably accurate results. We will be using a 3 x 1” aluminum box extrusion as the example workpiece. Let's say that we wanted to drill a hole that is 0.975” above the bottom edge of this piece and 1.150” from the right edge. Neither dimension is a common fraction, nor a demarcation found on most rulers. How would we drill such a hole on the drill press? Here, I have set the caliper to 0.975”, after making sure it is properly zeroed. Use the knurled knob to physically lock the caliper to a reading. These calipers have a resolution of 0.0005”. However, this last digit is extremely uncertain. Treat your dimensions as if Calipers are magnetic and can they only have 3 digits attract dirt and grit. -

FIELD EXTENSIONS and the CLASSICAL COMPASS and STRAIGHT-EDGE CONSTRUCTIONS 1. Introduction to the Classical Geometric Problems 1
FIELD EXTENSIONS AND THE CLASSICAL COMPASS AND STRAIGHT-EDGE CONSTRUCTIONS WINSTON GAO Abstract. This paper will introduce the reader to field extensions at a rudi- mentary level and then pursue the subject further by looking to its applications in a discussion of some constructibility issues in the classical straight-edge and compass problems. Field extensions, especially their degrees are explored at an introductory level. Properties of minimal polynomials are discussed to this end. The paper ends with geometric problems and the construction of polygons which have their proofs in the roots of field theory. Contents 1. introduction to the classical geometric problems 1 2. fields, field extensions, and preliminaries 2 3. geometric problems 5 4. constructing regular polygons 8 Acknowledgments 9 References 9 1. Introduction to the Classical Geometric Problems One very important and interesting set of problems within classical Euclidean ge- ometry is the set of compass and straight-edge questions. Basically, these questions deal with what is and is not constructible with only an idealized ruler and compass. The ruler has no markings (hence technically a straight-edge) has infinite length, and zero width. The compass can be extended to infinite distance and is assumed to collapse when lifted from the paper (a restriction that we shall see is irrelevant). Given these, we then study the set of constructible elements. However, while it is interesting to note what kinds objects we can create, it is far less straight forward to show that certain objects are impossible to create with these tools. Three famous problems that we will investigate will be the squaring the circle, doubling the cube, and trisecting an angle. -

Autonomous Geocaching: Navigation and Goal Finding in Outdoor Domains
Autonomous Geocaching: Navigation and Goal Finding in Outdoor Domains James Neufeld Jason Roberts Stephen Walsh University of Alberta University of Alberta University of Alberta 114 St - 89 Ave 114 St - 89 Ave 114 St - 89 Ave Edmonton, Alberta Edmonton, Alberta Edmonton, Alberta [email protected] [email protected] [email protected] Michael Sokolsky Adam Milstein Michael Bowling University of Alberta University of Waterloo University of Alberta 114 St - 89 Ave 200 University Avenue West 114 St - 89 Ave Edmonton, Alberta Waterloo, Ontario Edmonton, Alberta [email protected] [email protected] [email protected] ABSTRACT ticipants use a handheld GPS to aid in ¯nding an object This paper describes an autonomous robot system designed hidden in an unknown environment given only the object's to solve the challenging task of geocaching. Geocaching GPS coordinates. Typically the objects are placed in unde- involves locating a goal object in an outdoor environment veloped areas with no obvious roads or paths. Natural ob- given only its rough GPS position. No additional informa- stacles along with the lack of any map of the terrain make tion about the environment such as road maps, waypoints, it a challenging navigation problem even for humans. In ad- or obstacle descriptions is provided, nor is there often a sim- dition, due to the error in GPS position estimates, a search ple straight line path to the object. This is in contrast to is usually required to ¯nally locate the object even after the much of the research in robot navigation which often focuses GPS coordinate has been reached. -
Military Map Reading V2.0
MILITARY MAP READING This booklet is to help qualified Defence Map Reading instructors in unit map reading training and testing. The primary source is the Manual of Map Reading and Land Navigation, Army Code 71874.Issue 1.0: Apr 2009. The booklet can be used by all ranks of HM Forces (RN, RM, Army and RAF) for study and revision. It is suggested that a map of the local area be obtained for practical work and for the study of Conventional signs, which are intentionally NOT covered in this booklet. Comments and queries should be addressed to: Senior Instructor, Geospatial Information Management Wing Royal School of Military Survey, Defence Intelligence Security Centre, Denison Barracks (SU 498 729) Hermitage, THATCHAM, Berkshire, RG18 9TP © Crown copyright. All rights reserved ICG 100015347 2007 Version 2.0 Dated December 2010. 1 MILITARY MAP READING INDEX CHAPTER 1: MAP READING FUNDAMENTALS Maps and the grid system 3 Grid references 3 MGRS 5 Romers 6 GPS 7 Scale 8 Estimating and measuring distances 9 Contours 11 The shape of the ground 12 Bearings 15 Compass distances from ferrous metal 17 CHAPTER 2: NAVIGATION EQUIPMENT The compass LW 18 The prismatic compass 20 The RA protractor 22 CHAPTER 3: TECHNIQUES AND SKILLS Relating map and ground 24 Using a lightweight compass to set a map 26 Finding a location by LW Intersection 27 Plotting back bearings-LW/RA protractor 28 Finding your location by LW resection 29 Finding direction by sun and stars 30 CHAPTER 4: ROUTE SELECTION Factors for route selection 34 Other planning factors 35 Route cards -
6. Determination of Height and Distance: Theodolite
Geography (H), UG, 2nd Sem CC-04-TH: Thematic Cartography 6. Determination of Height and Distance: Theodolite What is Theodolite? A Theodolite is a measuring instrument used to measure the horizontal and vertical angles are determined with great precision. Theodolite is more precise than magnetic compass. Magnetic compass measures the angle up to as accuracy of 30’. Anyhow a vernier theodolite measures the angles up to and accuracy of 10’’, 20”. It is of either transit or non- transit type. In Transit theodolites the telescope can rotate in a complete circle in the vertical plane while Non-transit theodolites are those in which the telescope can rotate only in a semicircle in the vertical plane. Types of Theodolite A Transit Theodolite Non transit Theodolite B Vernier Theodolite Micrometer Theodolite A I. Transit Theodolite: a theodolite is called transit theodolite when its telescope can be transited i.e. revolved through a complete revolution about its horizontal axis in the vertical plane. II. Non transit Theodolite: the telescope cannot be transited. They are inferior in utility and have now become obsolete. Kaberi Murmu B I. Vernier Theodolite: For reading the graduated circle if verniers are used, the theodolite is called a vernier theodolit. II. Whereas, if a micrometer is provided to read the graduated circle the same is called as a Micrometer Theodolite. Vernier type theodolites are commonly used. Uses of Theodolite Theodolite uses for many purposes, but mainly it is used for measuring angles, scaling points of constructional works. For example, to determine highway points, huge buildings’ escalating edges theodolites are used. -

Celestial Coordinate Systems
Celestial Coordinate Systems Craig Lage Department of Physics, New York University, [email protected] January 6, 2014 1 Introduction This document reviews briefly some of the key ideas that you will need to understand in order to identify and locate objects in the sky. It is intended to serve as a reference document. 2 Angular Basics When we view objects in the sky, distance is difficult to determine, and generally we can only indicate their direction. For this reason, angles are critical in astronomy, and we use angular measures to locate objects and define the distance between objects. Angles are measured in a number of different ways in astronomy, and you need to become familiar with the different notations and comfortable converting between them. A basic angle is shown in Figure 1. θ Figure 1: A basic angle, θ. We review some angle basics. We normally use two primary measures of angles, degrees and radians. In astronomy, we also sometimes use time as a measure of angles, as we will discuss later. A radian is a dimensionless measure equal to the length of the circular arc enclosed by the angle divided by the radius of the circle. A full circle is thus equal to 2π radians. A degree is an arbitrary measure, where a full circle is defined to be equal to 360◦. When using degrees, we also have two different conventions, to divide one degree into decimal degrees, or alternatively to divide it into 60 minutes, each of which is divided into 60 seconds. These are also referred to as minutes of arc or seconds of arc so as not to confuse them with minutes of time and seconds of time. -

A Cognitive Model of Strategies for Cardinal Direction Judgments
SPATIAL COGNITION AND COMPUTATION, 7(2), 179–212 Copyright © 2007, Lawrence Erlbaum Associates, Inc. A Cognitive Model of Strategies for Cardinal Direction Judgments Leo Gugerty and William Rodes Psychology Department, Clemson University, Clemson, SC ABSTRACT Previous research has identified a variety of strategies used by novice and experienced navigators in making cardinal direction judgments (Gugerty, Brooks, & Treadaway, 2004). We developed an ACT-R cognitive model of some of these strategies that instantiated a number of concepts from research in spatial cognition, including a visual-short-term-memory buffer overlaid on a perceptual buffer, an egocentric ref- erence frame in visual-short-term-memory, storage of categorical spatial information in visual-short-term-memory, and rotation of a mental compass in visual-short-term- memory. Response times predicted by the model fit well with the data of two groups, college students (N D 20) trained and practiced in the modeled strategies, and jet pilots (N D 4) with no strategy training. Thus, the cognitive model seems to pro- vide an accurate description of important strategies for cardinal direction judgments. Additionally, it demonstrates how theoretical constructs in spatial cognition can be applied to a complex, realistic navigation task. Keywords: cardinal directions, cognitive modeling, visual short term memory. INTRODUCTION This project focuses on understanding the cognitive processes and structures people use in making a particular type of navigational judgment—using a map to determine the cardinal direction between two objects in the environment. We first developed a cognitive model of some of the strategies people use in making this type of cardinal direction judgment.