High Frequency AC Power Systems Huaxi Zheng University of South Carolina - Columbia
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Introduction to Power Quality
CHAPTER 1 INTRODUCTION TO POWER QUALITY 1.1 INTRODUCTION This chapter reviews the power quality definition, standards, causes and effects of harmonic distortion in a power system. 1.2 DEFINITION OF ELECTRIC POWER QUALITY In recent years, there has been an increased emphasis and concern for the quality of power delivered to factories, commercial establishments, and residences. This is due to the increasing usage of harmonic-creating non linear loads such as adjustable-speed drives, switched mode power supplies, arc furnaces, electronic fluorescent lamp ballasts etc.[1]. Power quality loosely defined, as the study of powering and grounding electronic systems so as to maintain the integrity of the power supplied to the system. IEEE Standard 1159 defines power quality as [2]: The concept of powering and grounding sensitive equipment in a manner that is suitable for the operation of that equipment. In the IEEE 100 Authoritative Dictionary of IEEE Standard Terms, Power quality is defined as ([1], p. 855): The concept of powering and grounding electronic equipment in a manner that is suitable to the operation of that equipment and compatible with the premise wiring system and other connected equipment. Good power quality, however, is not easy to define because what is good power quality to a refrigerator motor may not be good enough for today‟s personal computers and other sensitive loads. 1.3 DESCRIPTIONS OF SOME POOR POWER QUALITY EVENTS The following are some examples and descriptions of poor power quality “events.” Fig. 1.1 Typical power disturbances [2]. ■ A voltage sag/dip is a brief decrease in the r.m.s line-voltage of 10 to 90 percent of the nominal line-voltage. -

How to Select an AC Power Supply by Grady Keeton
858.458.0223 | www.programmablepower.com White Paper How to Select an AC Power Supply By Grady Keeton Today’s electronic products must work under all types of The response of the AC power source to inrush current is conditions, not just ideal ones. That being the case, AC sources dependent on the method that the source uses for current- used in test applications must not only supply a stable source of limiting. AC power sources are designed to protect themselves AC, they must also simulate power-line disturbances and other from excessive loads current by either folding back the voltage non-ideal situations. (current limiting) or shutting down the output (current-limiting shutdown) and in many cases, this is user selectable. Fortunately, today’s switching AC power sources are up to the task. They offer great specifications and powerful waveform- In some instances, it may not be practical to have an AC source generation capabilities that allow users to more easily that can supply the full inrush current demanded by the load. If generate complex harmonic waveforms, transient waveforms, the test does not require the stress test from this current, it may and arbitrary waveforms than ever before. Some can even be possible to use the current-limiting foldback technique for provide both AC and DC outputs simultaneously and make these tests. AC motors can draw up to seven times the normal measurements as well as provide power. This level of flexibility operating current when first started. How long the motor will is making it easier to ensure that electronic products will work draw this current depends on the mechanical load and the under adverse conditions. -
Causes, Effects and Solutions for Poor Electrical Quality of Supply in Power Systems
QualityEskom of supply The means to safe, reliable and sustainable operations Causes, effects and solutions for poor electrical quality of supply in power systems Provision of electricity supply These effects via the network can, in turn, cause severe disturbances within businesses and other neighbouring electricity customers. Most renewable energy sources, process equipment and electro-technologies have elements of instant or In today’s global society the importance and necessity of electricity as part of continuous uncontrollability at various levels, which influence the quality of the everyday life can’t be underestimated. Electricity is the driving force behind power supply if not addressed via technical solutions or by means of responsible various fields of human activity: engineering, communication and transport, connection methods. entertainment, health and more importantly it fuels technological development and transformation. It is almost impossible to imagine life without electricity. What is quality of supply It is therefore important to have a look at electricity power quality. Wikipedia describes electric power quality as follows: “Electric power quality, or simply power The misconception is that good power quality means a perfect wave form and/ quality, involves voltage, frequency, and waveform. Good power quality can be or uninterruptable power supply. defined as a steady supply voltage that stays within the prescribed range, steady AC frequency close to the rated value, and smooth voltage curve waveform Both of these are desirable, but only accounts for two dimensions of the (resembles a pure sine wave). Without the proper power, an electrical device (or power supply. A power supply performance as defined in the aforementioned load) may malfunction, fail prematurely or not operate at all“. -

Power Quality Standards
Pacific Gas and Electric Company Power Quality Standards IEEE Standard 141-1993, Recommended Practice for Electric Power Distribution for Industrial Plants, aka the Red Book. A thorough analysis of basic electrical-system considerations is presented. Guidance is provided in design, construction, and continuity of an overall system to achieve safety of life and preservation of property; reliability; simplicity of operation; voltage regulation in the utilization of equipment within the tolerance limits under all load conditions; care and maintenance; and flexibility to permit development and expansion. IEEE Standard 142-1991, Recommended Practice for Grounding of Industrial and Commercial Power Systems, aka the Green Book. Presents a thorough investigation of the problems of grounding and the methods for solving these problems. There is a separate chapter for grounding sensitive equipment. IEEE Standard 242-1986, Recommended Practice for Protection and Coordination of Industrial and Commercial Power Systems, aka the Buff Book. Deals with the proper selection, application, and coordination of the components which constitute system protection for industrial plants and commercial buildings. IEEE Standard 446-1987, Recommended Practice for Emergency and Standby Power Systems for Industrial and Commercial Applications, aka the Orange Book. Recommended engineering practices for the selection and application of emergency and standby power systems. It provides facility designers, operators and owners with guidelines for assuring uninterrupted power, virtually free of frequency excursions and voltage dips, surges, and transients. IEEE Standard 493-1997, Recommended Practice for Design of Reliable Industrial and Commercial Power Systems, aka the Gold Book. The fundamentals of reliability analysis as it applies to the planning and design of industrial and commercial electric power distribution systems are presented. -
Power Flow on AC Transmission Lines
Basics of Electricity Power Flow on AC Transmission Lines PJM State & Member Training Dept. PJM©2014 7/11/2013 Objectives • Describe the basic make-up and theory of an AC transmission line • Given the formula for real power and information, calculate real power flow on an AC transmission facility • Given the formula for reactive power and information, calculate reactive power flow on an AC transmission facility • Given voltage magnitudes and phase angle information between 2 busses, determine how real and reactive power will flow PJM©2014 7/11/2013 Introduction • Transmission lines are used to connect electric power sources to electric power loads. In general, transmission lines connect the system’s generators to it’s distribution substations. Transmission lines are also used to interconnect neighboring power systems. Since transmission power losses are proportional to the square of the load current, high voltages, from 115kV to 765kV, are used to minimize losses PJM©2014 7/11/2013 AC Power Flow Overview PJM©2014 7/11/2013 AC Power Flow Overview R XL VS VR 1/2X 1/2XC C • Different lines have different values for R, XL, and XC, depending on: • Length • Conductor spacing • Conductor cross-sectional area • XC is equally distributed along the line PJM©2014 7/11/2013 Resistance in AC Circuits • Resistance (R) is the property of a material that opposes current flow causing real power or watt losses due to I2R heating • Line resistance is dependent on: • Conductor material • Conductor cross-sectional area • Conductor length • In a purely resistive -

7 CONTROL and PROTECTION of HYDRO ELECTRIC STATION 7.1 Introduction 7.1.1 Control System the Main Control And
CHAPTER –7 CONTROL AND PROTECTION OF HYDRO ELECTRIC STATION 7.1 Introduction 7.1.1 Control System The main control and automation system in a hydroelectric power plant are associated with start and stop sequence for the unit and optimum running control of power (real and reactive), voltage and frequency. Data acquisition and retrieval is used to cover such operations as relaying plant operating status, instantaneous system efficiency, or monthly plant factor, to the operators and managers. Type of control equipment and levels of control to be applied to a hydro plant are affected by such factors as number, size and type of turbine and generator. The control equipment for a hydro power plant include control circuits/logic, control devices, indication, instrumentation, protection and annunciation at the main control board and at the unit control board for generation, conversion and transmission operation including grid interconnected operation of hydro stations including small hydro stations. These features are necessary to provide operators with the facilities required for the control and supervision of the station’s major and auxiliary equipment. In the design of these features consideration must be given to the size and importance of the station with respect to other stations in the power system, location of the main control room with respect to the equipments to be controlled and all other station features which influence the control system. The control system of a power station plays an important role in the station’s rendering reliable service; this function should be kept in mind in the design of all control features. -

Reliability and Power Quality
ORNL/TM-2004/91 MEASUREMENT PRACTICES FOR RELIABILITY AND POWER QUALITY A TOOLKIT OF RELIABILITY MEASUREMENT PRACTICES June 2004 ORNL/TM-2004/91 MEASUREMENT PRACTICES FOR RELIABILITY AND POWER QUALITY A TOOLKIT OF RELIABILITY MEASUREMENT PRACTICES John D. Kueck and Brendan J. Kirby Oak Ridge National Laboratory Philip N. Overholt U.S. Department of Energy Lawrence C. Markel Sentech, Inc. June 2004 Prepared by Oak Ridge National Laboratory Oak Ridge, Tennessee 37831-6285 managed by UT-BATTELLE, LLC for the U.S. Department of Energy under contract DE-AC05-00OR22725 Contents Acknowledgments ...................................................................................................................... v 1. Introduction and Discussion of the Measurement “Toolkit” ....................................................... 1 2. Reliability: Definition and Discussion......................................................................................... 3 3. Power Quality: Definition and Discussion................................................................................... 4 4. Loss of Load Probability: A Historical Perspective..................................................................... 6 5. IEC Standards Description and Discussion ................................................................................. 8 6. Pitfalls in Methods for Reliability Index Calculation .................................................................. 9 7. Valuing Reliability...................................................................................................................... -
POWER QUALITY Energy Efficiency Reference Guide DISCLAIMER: Neither CEA Technologies Inc
POWER QUALITY Energy Efficiency Reference Guide DISCLAIMER: Neither CEA Technologies Inc. (CEATI), the authors, nor any of the organizations providing funding support for this work (including any persons acting on the behalf of the aforementioned) assume any liability or responsibility for any dam- ages arising or resulting from the use of any information, equip- ment, product, method or any other process whatsoever disclosed or contained in this guide. The use of certified practitioners for the application of the informa- tion contained herein is strongly recommended. This guide was prepared by Energy @ Work for the CEA Technologies Inc. (CEATI) Customer Energy Solutions Interest Group (CESIG) with the sponsorship of the following utility consortium participants: © 2007 CEA Technologies Inc. (CEATI) All rights reserved. Appreciation to Ontario Hydro, Ontario Power Generation and others who have contributed material that has been used in preparing this guide. Table of Contents Chapter Page Foreword 5 Power Quality Guide Format 5 1.0 The Scope of Power Quality 9 1.1 Definition of Power Quality 9 1.3 Why Knowledge of Power Quality is Important 13 1.4 Major Factors Contributing to Power Quality Issues 14 1.5 Supply vs. End Use Issues 15 1.6 Countering the Top 5 PQ Myths 16 1.7 Financial and Life Cycle Costs 19 2.0 Understanding Power Quality Concepts 23 2.1 The Electrical Distribution System 23 2.2 Basic Power Quality Concepts 28 3.0 Power Quality Problems 33 3.1 How Power Quality Problems Develop 33 3.2 Power Quality Disturbances 35 3.3 -

Review on Laminated Busbars Used in High Frequency Inverters
E3S Web of Conferences 184, 01063 (2020) https://doi.org/10.1051/e3sconf/202018401063 ICMED 2020 Review on Laminated Busbars used in High Frequency Inverters Chirisavada Jagadeesh1,,Gajala Himavarsha2 and Bobba Phaneendra Babu1 1Department of Electrical Engineering, GRIET, Hyderabad, Telangana, India 2Department of Electrical Engineering, GRIET, Hyderabad, Telangana, India 3Department of Electrical Engineering, GRIET, Hyderabad, Telangana, India Abstract. Improvement in the efficiency and cost in the high frequency inverter will play a major role in its applications like electrical vehicles (EV). A high voltage IGBTs are used in inverters to bear the voltage peaks across the IGBT switch at the turning off period of switch. By decreasing the value of voltage peak, can reduce the voltage rating of IGBT switch, by which the system cost will decrease. Decreasing the value of voltage peak can be achieved by decreasing the inductance of the inverter circuit which includes turned on switch inductance, DC link capacitors inductance and connecting wires inductance. By replacing the connecting wires with a laminated busbar in an inverter, the inductance value of a connecting wires can be reduced. Laminated bus bar is a parallel conductor plates separated by a dielectric medium. Upper plate is considered as positive plate and lower plate is a negative plate. In this paper it gives a detailed information about laminated busbar with different designs, using different conductive materials, their calculated inductance in ANSYS 3D FEM software and concluding with suitable laminated busbar for high frequency inverter. l 1 = l s + l bc + l ca. (2) 1 Introduction Where, ls is a connecting wires inductance of the H- bridge inverter, lbc is an internal inductance of IGBT Laminated busbar is a device used to reduce or include the switch Q1 of an H- bridge inverter and lca is an internal inductance in the power electronic circuits. -

DC Power Production, Delivery and Utilization
DDCC PPowerower PProduction,roduction, DDeliveryelivery aandnd UUtilizationtilization An EPRI White Paper June 2006 AAnn EEPRIPRI WWhitehite PPaperaper DC Power Production, Delivery and Utilization This paper was prepared by Karen George of EPRI Solutions, Inc., based on technical material from: Arshad Mansoor, Vice President, EPRI Solutions Clark Gellings, Vice President—Innovation, EPRI Dan Rastler, Tech Leader, Distributed Resources, EPRI Don Von Dollen, Program Director, IntelliGrid, EPRI AAcknowledgementscknowledgements We would like to thank reviewers and contributors: Phil Barker, Principal Engineer, Nova Energy Specialists David Geary, Vice President, of Engineering, Baldwin Technologies, Inc. Haresh Kamath, EPRI Solutions Tom Key, Principal Technical Manager, EPRI Annabelle Pratt, Power Architect, Intel Corporation Mark Robinson, Vice President, Nextek Power Copyright ©2006 Electric Power Research Institute (EPRI), Palo Alto, CA USA June 2006 Page 2 AAnn EEPRIPRI WWhitehite PPaperaper DC Power Production, Delivery and Utilization Edison Redux: The New AC/DC Debate Thomas Edison’s nineteenth-century electric distribution sys- Several converging factors have spurred the recent interest in tem relied on direct current (DC) power generation, delivery, DC power delivery. One of the most important is that an in- and use. This pioneering system, however, turned out to be im- creasing number of microprocessor-based electronic devices practical and uneconomical, largely because in the 19th cen- use DC power internally, converted inside the device from tury, DC power generation was limited to a relatively low volt- standard AC supply. Another factor is that new distributed re- age potential and DC power could not be transmitted beyond sources such as solar photovoltaic (PV) arrays and fuel cells a mile. -
Octoplex G1-Series AC Power Distribution Unit
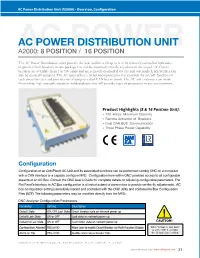
AC Power Distribution Unit (A2000) - Overview, Configuration AC POWER DISTRIBUTION UNIT A2000:AC 8 POSITION POWER / 16 POSITION The AC Power Distribution units provide the boat builder with up to 8 or 16 remotely controlled hydraulic- magnetic circuit breakers in one package that can be mounted virtually anywhere in the vessel. AC Circuit breakers are available from 1 to 100 amps and are remotely controlled via external solenoids. Each breaker can also be manually actuated. The AC units utilize a 16 bit microprocessor that controls the on/off function of each circuit breaker and provides interfacing to a dual CAN bus network. The AC unit enclosures are made from white, high strength, injection molded plastic that will provide years of protection in any environment. Product Highlights (8 & 16 Position Unit): 100 Amps Maximum Capacity Remote Actuation of Breakers Dual CAN BUS Communication Three Phase Power Capability Configuration Configuration of an OctoPlex® AC Unit and its associated functions can be performed running ONC on a computer with a CAN interface or a capably configure MFD. Configuration from within ONC provides access to all configurable aspects of an AC Box. Consult the ONC User’s Guide for complete details on adjusting configurable parameters. The Flat Panel’s interface to AC Box configuration is a limited subset of parameters to provide on-the-fly adjustments. AC box configuration settings are initially loaded and controlled with the ONC utility and contained in Box Configuration Files (BCF). The following parameters -

The Seven Types of Power Problems
The Seven Types of Power Problems White Paper 18 Revision 1 by Joseph Seymour Contents > Executive summary Click on a section to jump to it Introduction 2 Many of the mysteries of equipment failure, downtime, software and data corruption, are the result of a prob- Transients 4 lematic supply of power. There is also a common problem with describing power problems in a standard Interruptions 8 way. This white paper will describe the most common types of power disturbances, what can cause them, Sag / undervoltage 9 what they can do to your critical equipment, and how to Swell / overvoltage 10 safeguard your equipment, using the IEEE standards for describing power quality problems. Waveform distortion 11 Voltage fluctuations 15 Frequency variations 15 Conclusion 18 Resources 19 Appendix 20 RATE THIS PAPER white papers are now part of the Schneider Electric white paper library produced by Schneider Electric’s Data Center Science Center [email protected] The Seven Types of Power Problems Introduction Our technological world has become deeply dependent upon the continuous availability of electrical power. In most countries, commercial power is made available via nationwide grids, interconnecting numerous generating stations to the loads. The grid must supply basic national needs of residential, lighting, heating, refrigeration, air conditioning, and transporta- tion as well as critical supply to governmental, industrial, financial, commercial, medical and communications communities. Commercial power literally enables today’s modern world to function at its busy pace. Sophisticated technology has reached deeply into our homes and careers, and with the advent of e-commerce is continually changing the way we interact with the rest of the world.