Hidden Information, Teamwork, and Prediction in Trick-Taking Card Games
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

American Skat : Or, the Game of Skat Defined : a Descriptive and Comprehensive Guide on the Rules and Plays of This Interesting
'JTV American Skat, OR, THE GAME OF SKAT DEFINED. BY J. CHARLES EICHHORN A descriptive and comprehensive Guide on the Rules and Plays of if. is interesting game, including table, definition of phrases, finesses, and a full treatise on Skat as played to-day. CHICAGO BREWER. BARSE & CO. Copyrighted, January 21, 1898 EICHHORN By J. CHARLES SKAT, with its many interesting features and plays, has now gained such a firm foothold in America, that my present edition in the English language on this great game of cards, will not alone serve as a guide for beginners, but will be a complete compendium on this absorbing game. It is just a decade since my first book was pub- lished. During the past 10 years, the writer has visited, and been in personal touch with almost all the leading authorities on the game of Skat in Amer- ica as well as in Europe, besides having been contin- uously a director of the National Skat League, as well as a committeeman on rules. In pointing out the features of the game, in giving the rules, defining the plays, tables etc., I shall be as concise as possible, using no complicated or lengthy remarks, but in short and comprehensive manner, give all the points and information required. The game of Skat as played today according to the National Skat League values and rulings, with the addition of Grand Guckser and Passt Nicht as variations, is as well balanced a game, as the leading authorities who have given the same both thorough study and consideration, can make. -
The Game of Whist
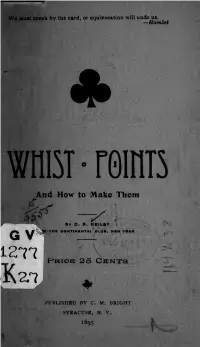
THE GAME OF WHIST “WHIST” comes from an English word meaning silent and attentive. Whist is a trick-based card game similar to Euchre and Hearts. Originally developed in eighteenth-century English social circles, it quickly became one of the most popular games in the American colonies and early United States. LAWS OF THE GAME Whist is played with 4 people in pairs of 2. Cut the deck: the player who draws a high card is the dealer! The dealer deals each player 13 cards. The last card (to the dealer) is dealt face up, indicating the trump suit. The player to the dealer’s left leads the first “trick” with any card they choose. “A Pig in a Poke, Whist, Whist” Hand-coloured etching Aces are high. Twos are low. by James Gillray, 1788. National Portrait Gallery, London Moving clockwise, each player plays a card on that trick. If they can, players must follow the suit of the card led or they may play a trump card. Players with no card of that suit can play any card, including a trump card. The player with the highest card of the led suit or the highest trump card wins the trick and places the 4 cards to their side. TRICKS The winning player leads the next trick. When all of the cards have been played, for total of 12 tricks, each pair earns 1 point for every trick they won in excess of 6. For example, a player who wins 8 tricks would earn 2 points. A trick penalty is given to anyone who fails to follow suit when they have that suit in hand. -

Table of Contents
TABLE OF CONTENTS System Requirements . 3 Installation . 3. Introduction . 5 Signing In . 6 HOYLE® PLAYER SERVICES Making a Face . 8 Starting a Game . 11 Placing a Bet . .11 Bankrolls, Credit Cards, Loans . 12 HOYLE® ROYAL SUITE . 13. HOYLE® PLAYER REWARDS . 14. Trophy Case . 15 Customizing HOYLE® CASINO GAMES Environment . 15. Themes . 16. Playing Cards . 17. Playing Games in Full Screen . 17 Setting Game Rules and Options . 17 Changing Player Setting . 18 Talking Face Creator . 19 HOYLE® Computer Players . 19. Tournament Play . 22. Short cut Keys . 23 Viewing Bet Results and Statistics . 23 Game Help . 24 Quitting the Games . 25 Blackjack . 25. Blackjack Variations . 36. Video Blackjack . 42 1 HOYLE® Card Games 2009 Bridge . 44. SYSTEM REQUIREMENTS Canasta . 50. Windows® XP (Home & Pro) SP3/Vista SP1¹, Catch The Ten . 57 Pentium® IV 2 .4 GHz processor or faster, Crazy Eights . 58. 512 MB (1 GB RAM for Vista), Cribbage . 60. 1024x768 16 bit color display, Euchre . 63 64MB VRAM (Intel GMA chipsets supported), 3 GB Hard Disk Space, Gin Rummy . 66. DVD-ROM drive, Hearts . 69. 33 .6 Kbps modem or faster and internet service provider Knockout Whist . 70 account required for internet access . Broadband internet service Memory Match . 71. recommended .² Minnesota Whist . 73. Macintosh® Old Maid . 74. OS X 10 .4 .10-10 .5 .4 Pinochle . 75. Intel Core Solo processor or better, Pitch . 81 1 .5 GHz or higher processor, Poker . 84. 512 MB RAM, 64MB VRAM (Intel GMA chipsets supported), Video Poker . 86 3 GB hard drive space, President . 96 DVD-ROM drive, Rummy 500 . 97. 33 .6 Kbps modem or faster and internet service provider Skat . -
Whist Points and How to Make Them
We inuBt speak by the card, or equivocation will undo us, —Hamlet wtii5T • mm And How to Make Them By C. R. KEILEY G V »1f-TMB OONTINBNTIkL OLUMj NBWYOH 1277 F'RIOE 2 5 Cknxs K^7 PUBLISHED BY C. M. BRIGHT SYRACUSE, N. Y. 1895 WHIST POINTS And How to ^Make Them ^W0 GUL ^ COPYRIGHT, 1895 C. M. BRIGHT INTRODUCTORY. This little book presupposes some knowledge of "whist on the part of the reader, and is intended to contain suggestions rather than fiats. There is nothing new in it. The compiler has simply placed before the reader as concisely as possible some of the points of whist which he thinks are of the most importance in the development of a good game. He hopes it may be of assistance to the learner in- stead of befogging him, as a more pretentious effort might do. There is a reason for every good play in whist. If the manner of making the play is given, the reason for it will occur to every one who can ever hope to become a whist player. WHIST POINTS. REGULAR LEADS. Until you have mastered all the salient points of the game, and are blessed with a partner possessing equal intelligence and information, you will do well to follow the general rule:—Open your hand by leading your longest suit. There are certain well established leads from combinations of high cards, which it would be well for every student of the game to learn. They are easy to remember, and are of great value in giving^ information regarding numerical and trick taking strength simultaneously, ACE. -

The Penguin Book of Card Games
PENGUIN BOOKS The Penguin Book of Card Games A former language-teacher and technical journalist, David Parlett began freelancing in 1975 as a games inventor and author of books on games, a field in which he has built up an impressive international reputation. He is an accredited consultant on gaming terminology to the Oxford English Dictionary and regularly advises on the staging of card games in films and television productions. His many books include The Oxford History of Board Games, The Oxford History of Card Games, The Penguin Book of Word Games, The Penguin Book of Card Games and the The Penguin Book of Patience. His board game Hare and Tortoise has been in print since 1974, was the first ever winner of the prestigious German Game of the Year Award in 1979, and has recently appeared in a new edition. His website at http://www.davpar.com is a rich source of information about games and other interests. David Parlett is a native of south London, where he still resides with his wife Barbara. The Penguin Book of Card Games David Parlett PENGUIN BOOKS PENGUIN BOOKS Published by the Penguin Group Penguin Books Ltd, 80 Strand, London WC2R 0RL, England Penguin Group (USA) Inc., 375 Hudson Street, New York, New York 10014, USA Penguin Group (Canada), 90 Eglinton Avenue East, Suite 700, Toronto, Ontario, Canada M4P 2Y3 (a division of Pearson Penguin Canada Inc.) Penguin Ireland, 25 St Stephen’s Green, Dublin 2, Ireland (a division of Penguin Books Ltd) Penguin Group (Australia) Ltd, 250 Camberwell Road, Camberwell, Victoria 3124, Australia -
Red Book of Contract Bridge
The RED BOOK of CONTRACT BRIDGE A DIGEST OF ALL THE POPULAR SYSTEMS E. J. TOBIN RED BOOK of CONTRACT BRIDGE By FRANK E. BOURGET and E. J. TOBIN I A Digest of The One-Over-One Approach-Forcing (“Plastic Valuation”) Official and Variations INCLUDING Changes in Laws—New Scoring Rules—Play of the Cards AND A Recommended Common Sense Method “Sound Principles of Contract Bridge” Approved by the Western Bridge Association albert?whitman £7-' CO. CHICAGO 1933 &VlZ%z Copyright, 1933 by Albert Whitman & Co. Printed in U. S. A. ©CIA 67155 NOV 15 1933 PREFACE THE authors of this digest of the generally accepted methods of Contract Bridge have made an exhaustive study of the Approach- Forcing, the Official, and the One-Over-One Systems, and recog¬ nize many of the sound principles advanced by their proponents. While the Approach-Forcing contains some of the principles of the One-Over-One, it differs in many ways with the method known strictly as the One-Over-One, as advanced by Messrs. Sims, Reith or Mrs, Kerwin. We feel that many of the millions of players who have adopted the Approach-Forcing method as advanced by Mr. and Mrs. Culbertson may be prone to change their bidding methods and strategy to conform with the new One-Over-One idea which is being fused with that system, as they will find that, by the proper application of the original Approach- Forcing System, that method of Contract will be entirely satisfactory. We believe that the One-Over-One, by Mr. Sims and adopted by Mrs. -
Pinochle-Rules.Pdf
Pinochle From Wikipedia, the free encyclopedia Pinochle (sometimes pinocle, or penuchle) is a trick-taking Pinochle game typically for two, three or four players and played with a 48 card deck. Derived from the card game bezique, players score points by trick-taking and also by forming combinations of cards into melds. It is thus considered part of a "trick-and- meld" category which also includes a cousin, belote. Each hand is played in three phases: bidding, melds, and tricks. In some areas of the United States, such as Oklahoma and Texas, thumb wrestling is often referred to as "pinochle". [citation needed] The two games, however, are not related. The jack of diamonds and the queen of spades are Contents the "pinochle" meld of pinochle. 1 History Type Trick-taking 2 The deck Players 4 in partnerships or 3 3 Dealing individually, variants exist for 2- 4 The auction 6 or 8 players 5 Passing cards 6 Melding Skills required Strategy 7 Playing tricks Social skills 8 Scoring tricks Teamwork 9 Game variations 9.1 Two-handed Pinochle Card counting 9.2 Three-handed Pinochle Cards 48 (double 24 card deck) or 80 9.3 Cutthroat Pinochle (quadruple 20 card deck) 9.4 Four-handed Pinochle 9.5 Five-handed and larger Pinochle Deck Anglo-American 9.6 Check Pinochle 9.7 Double-deck Pinochle Play Clockwise 9.8 Racehorse Pinochle Card rank A 10 K Q J 9 9.9 Double-deck Pinochle for eight players (highest to 10 See also lowest) 11 References 12 External links Playing time 1 to 5 hours Random chance Medium History Related games Pinochle derives from the game bezique. -

History of the Modern Point Count System in Large Part from Frank Hacker’S Article from Table Talk in January 2013
History of the Modern Point Count System In large part from Frank Hacker’s article from Table Talk in January 2013 Contract bridge (as opposed to auction bridge) was invented in the late 1920s. During the first 40 years of contract bridge: Ely Culbertson (1891 – 1955) and Charles Goren (1901 -1991) were the major contributors to hand evaluation. It’s of interest to note that Culbertson died in Brattleboro, Vermont. Ely Culbertson did not use points to evaluate hands. Instead he used honor tricks. Goren and Culbertson overlapped somewhat. Charles Goren popularized the point count with his 1949 book “Point Count Bidding in Contract Bridge.” This book sold 3 million copies and went through 12 reprintings in its first 5 years. Charles Goren does not deserve the credit for introducing or developing the point count. Bryant McCampbell introduced the 4-3-2-1 point count in 1915, not for auction bridge, but for auction pitch. Bryant McCampbell was also an expert on auction bridge and he published a book on auction bridge in 1916. This book is still in print and available from Amazon. Bryant Mc Campbell was only 50 years old when he died at 103 East Eighty-fourth Street in NY City on May 6 1927 after an illness of more than two years. He was born on January 2, 1877 in St Louis? to Amos Goodwin Mc Campbell and Sarah Leavelle Bryant. He leaves a wife, Irene Johnson Gibson of Little Rock, Ark. They were married on October 16, 1915. Bryant was a retired Textile Goods Merchant and was in business with his younger brother, Leavelle who was born on May 28, 1879. -

A Sampling of Card Games
A Sampling of Card Games Todd W. Neller Introduction • Classifications of Card Games • A small, diverse, simple sample of card games using the standard (“French”) 52-card deck: – Trick-Taking: Oh Hell! – Shedding: President – Collecting: Gin Rummy – Patience/Solitaire: Double Freecell Card Game Classifications • Classification of card games is difficult, but grouping by objective/mechanism clarifies similarities and differences. • Best references: – http://www.pagat.com/ by John McLeod (1800+ games) – “The Penguin Book of Card Games” by David Parlett (250+) Parlett’s Classification • Trick-Taking (or Trick-Avoiding) Games: – Plain-Trick Games: aim for maximum tricks or ≥/= bid tricks • E.g. Bridge, Whist, Solo Whist, Euchre, Hearts*, Piquet – Point-Trick Games: aim for maximum points from cards in won tricks • E.g. Pitch, Skat, Pinochle, Klabberjass, Tarot games *While hearts is more properly a point-trick game, many in its family have plain-trick scoring elements. Piquet is another fusion of scoring involving both tricks and cards. Parlett’s Classification (cont.) • Card-Taking Games – Catch-and-collect Games (e.g. GOPS), Fishing Games (e.g. Scopa) • Adding-Up Games (e.g. Cribbage) • Shedding Games – First-one-out wins (Stops (e.g. Newmarket), Eights (e.g. Crazy 8’s, Uno), Eleusis, Climbing (e.g. President), last-one-in loses (e.g. Durak) • Collecting Games – Forming sets (“melds”) for discarding/going out (e.g. Gin Rummy) or for scoring (e.g. Canasta) • Ordering Games, i.e. Competitive Patience/Solitaire – e.g. Racing Demon (a.k.a. Race/Double Canfield), Poker Squares • Vying Games – Claiming (implicitly via bets) that you have the best hand (e.g. -

Official Rules for Bid Whist Tournamenti
DETROIT PARKS & RECREATION DEPARTMENT Detroit Senior Olympics Official Rules For Bid Whist Tournamenti Version 1.0 Implemented 2015 Revised 2017 Table of Contents I. Introduction ........................................................................................................................ 3 II. Eligibility ............................................................................................................................. 4 III. Rules of Conduct ................................................................................................................ 4 IV. The Deal .............................................................................................................................. 5 V. Card Values ........................................................................................................................ 5 VI. Bidding ................................................................................................................................ 5 VII. Kitty ..................................................................................................................................... 6 VIII. Rank of Bids ....................................................................................................................... 7 IX. Play of Hand ....................................................................................................................... 7 X. Scoring by Rounds ............................................................................................................ -

CASINO from NOWHERE, to VAGUELY EVERYWHERE Franco Pratesi - 09.10.1994
CASINO FROM NOWHERE, TO VAGUELY EVERYWHERE Franco Pratesi - 09.10.1994 “Fishing games form a rich hunting ground for researchers in quest of challenge”, David Parlett writes in one of his fine books. (1) I am not certain that I am a card researcher, and I doubt the rich hunting-ground too. It is several years since I began collecting information on these games, without noticeable improvements in my knowledge of their historical development. Therefore I would be glad if some IPCS member could provide specific information. Particularly useful would be descriptions of regional variants of fishing games which have − or have had − a traditional character. Within the general challenge mentioned, I have encountered an unexpected specific challenge: the origin of Casino, always said to be of Italian origin, whereas I have not yet been able to trace it here. So it appears to me, that until now, it is a game widespread from nowhere in Italy. THE NAME As we know, even the correct spelling of the name is in dispute. The reason for writing Cassino is said to be a printing mistake in one of the early descriptions. The most probable origin is from the same Italian word casino, which entered the English vocabulary to mean “a pleasure-house”, “a public room used for social meetings” and finally “a public gambling-house”. So the name of the game would better be written Casino, as it was spelled in the earliest English descriptions (and also in German) towards the end of the 18th century. If the origin has to be considered − and assuming that information about further uses of Italian Casino is not needed − it may be noted that Italian Cassino does exist too: it is a word seldom used and its main meaning of ‘box-cart’ hardly has any relevance to our topic. -

A PRIMER of SKAT Istij) SKATA PRIMER OF
G V Class __C-_Vizs:? o Book-_A_^_fe Copyright W. COPYRIGHT DEPOSIT. A PRIMER OF SKAT istij) SKATA PRIMER OF A. ELIZABETH WAGER-SMITH PHILADELPHIA & LONDON J. B. LIPPINCOTT COMPANY 1907 LIBRARY of CONGRESsI Two Copies Reeetved APR 24 ld07 Jf •epyriglit Entry r\ CUSS A KXCm n/. \ ' 7 V^ '^f^J. Copyright, 1907 By J, B. LiPPiNcoTT Company Published in April, 1907 Electrotyped and Printed by J. B. Lippincott Company, Washington Square Press, Philadelphia, U. S. A. CONTENTS PAGE Introduction vii Lesson I. Synopsis op the Game 9 Lesson II. Arranging the Cards—The Provocation .... 14 Lesson III. Announcement op Game .... 16 Lesson IV. The Score-Card 18 Lesson V. How to Bid 20 Lesson YI. How to Bid (Concluded) 25 Lesson VII. The Discard 29 Lesson VIII. The Player, as Leader 30 Lesson IX. The Player, as IMiddlehand and Hinderhand . 35 Lesson X. The Opponents. 36 Lesson XL A Game for the Beginner 40 Lesson XIL Keeping Count 42 Table op Values 44 Rules of the Game—Penalties 45 Glossary of Terms 49 References 52 The German Cards 52 Score-Cards 53-64 INTRODUCTION Skat is often called complex, but it has the '* complexity ' of the machine, not of the tangled skein. ' Its intellectual possibilities are endless, and no card game. Whist not ex- cepted, offers such unlimited opportunity for strategic play and well-balanced judgment. Thoroughly democratic, it was the first game introduced to an American audience wherein the knavish Jacks took precedence of the " royal pair "; and from this character- istic Euchre was evolved. At that time the American card-mind was not sufficiently cultivated to receive Skat.